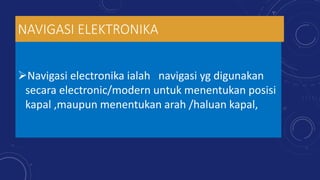
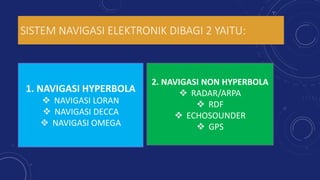
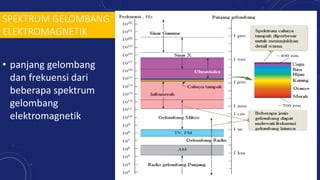
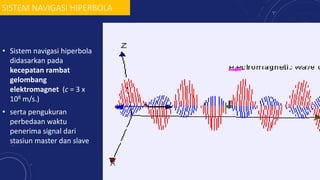
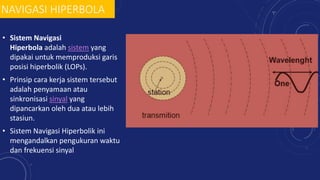
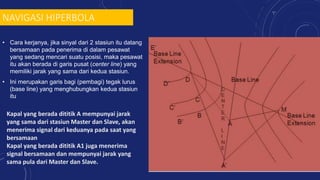
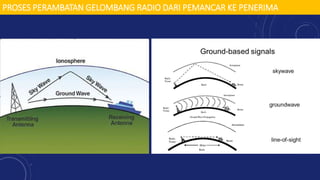
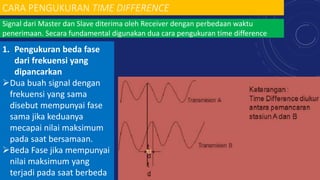
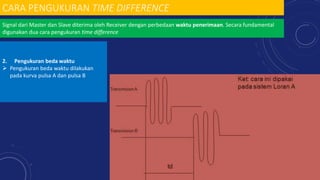
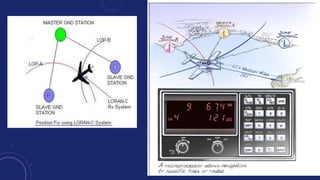




Dokumen ini membahas sistem navigasi elektronika, khususnya sistem navigasi hiperbola dan berbagai jenisnya, termasuk Loran dan Decca. Navigasi hiperbola mengandalkan pengukuran perbedaan waktu sinyal dari stasiun master dan slave untuk menentukan posisi kapal dengan akurasi tertentu. Selain itu, dokumen menjelaskan cara kerja dan prinsip dasar dari berbagai sistem navigasi dalam konteks gelombang elektromagnet.



























































