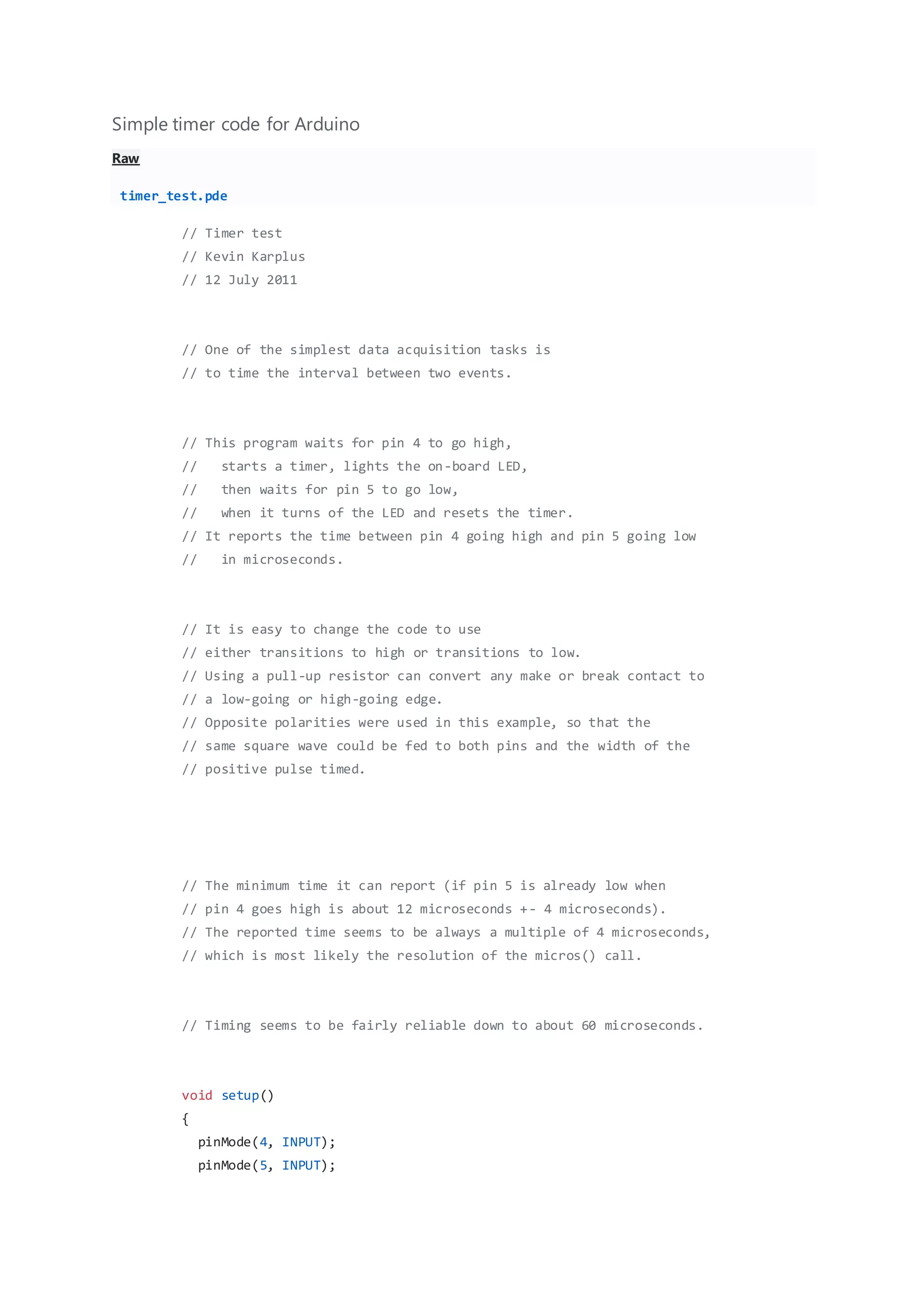
This Arduino code measures the time interval between a pin going high and another pin going low. It waits for pin 4 to go high, starts a timer, lights an LED, then waits for pin 5 to go low, stops the timer, and reports the elapsed time in microseconds. The code provides a simple way to time events and can reliably measure intervals down to about 60 microseconds.