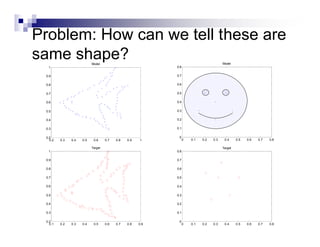
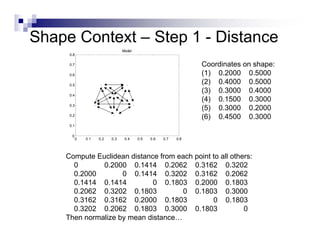
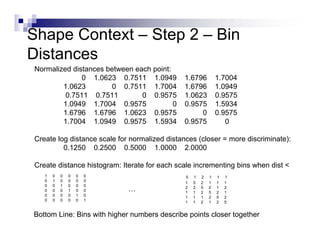
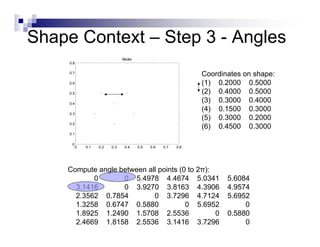
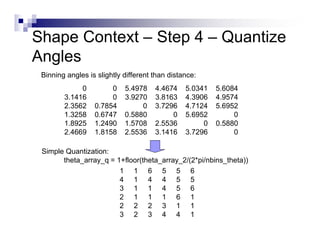
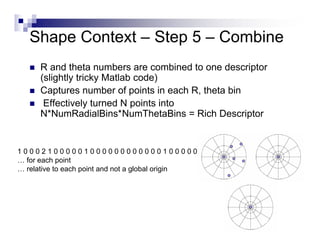
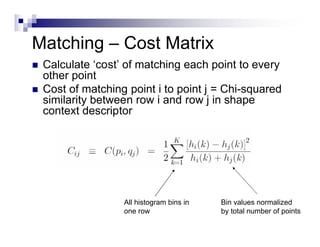
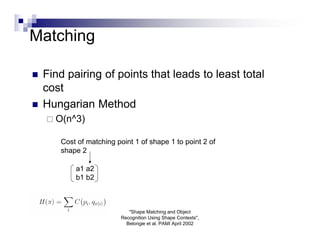
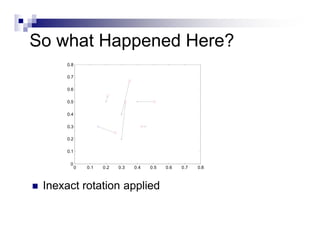
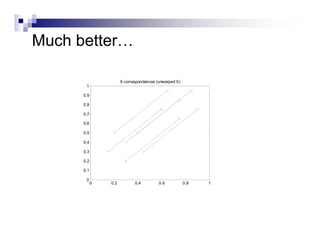
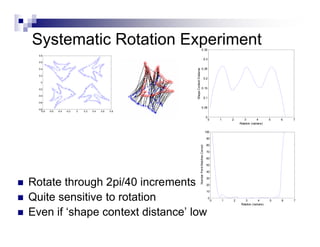
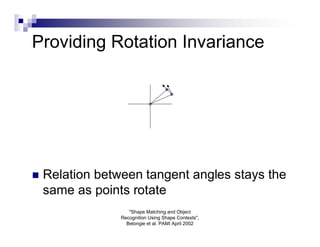
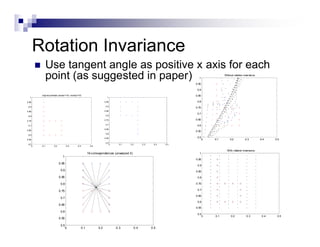
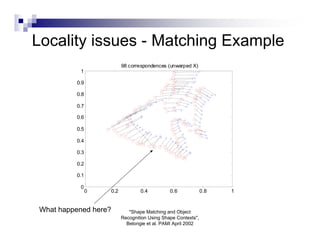
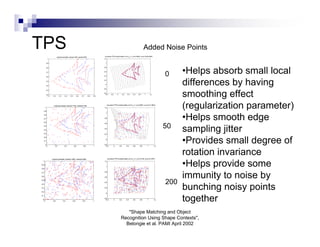
This document summarizes the shape context algorithm for shape matching and object recognition. It discusses computing shape contexts, which describe the distribution of relative positions of points around a shape. Shape contexts are represented as histograms of distances and angles between points. The algorithm finds correspondences between points on two shapes by matching their shape contexts and minimizing the total cost. Additional cost terms can be added, such as color or texture differences. The algorithm is shown to be robust to noise and inexact rotations.