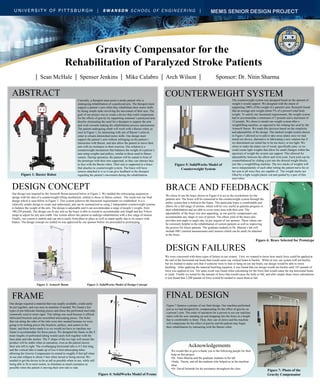
This document describes a device called the Gravity Compensator that was designed to support the arm of a stroke patient undergoing rehabilitation without requiring a therapist. The device uses a counterweight system of pulleys and adjustable weights to balance the weight of the patient's arm and allow for free range of motion. Sensors on the arm brace can provide feedback on the patient's movements as they do exercises interacting with a Baxter robot. The final prototype was constructed of an adjustable steel frame, counterweight stacks, and an arm brace that can accommodate patients of different sizes and fully support each joint of the arm.









































![ICNR2016_Knuth[1384]](https://cdn.slidesharecdn.com/ss_thumbnails/6c67b0f5-4fc6-46ef-8f35-499ef5c55f5a-170203174039-thumbnail.jpg?width=640&height=640&fit=bounds)





