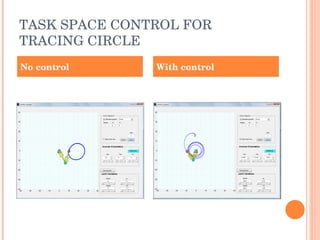
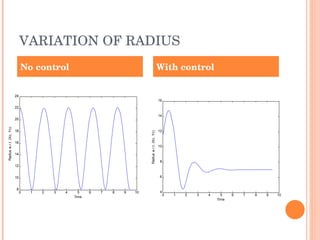
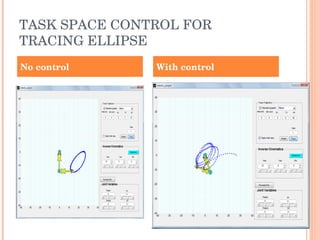
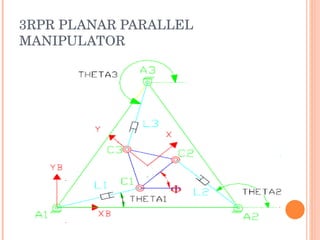
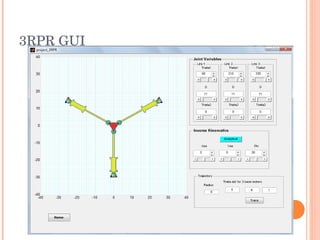
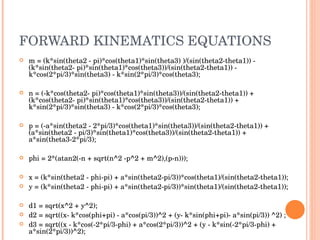
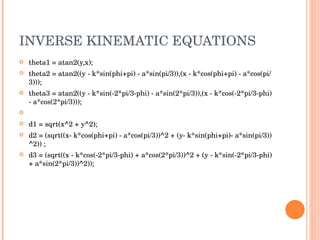
The document discusses the forward and inverse kinematics, trajectory tracking, and control of 3RPR planar parallel manipulators. It describes developing the homogeneous transformation matrices to draw link polygons in MATLAB. It also covers applying task space control for tracing circles and ellipses, and discusses reaching manipulator limits. Equations for the forward and inverse kinematics of the 3RPR parallel manipulator are provided. The approach for trajectory tracing using Jacobian matrices is outlined.

![USE OF HOMOGENEOUS TRANSFORMATION TO DRAW LINK POLYGONS matlab_th1= theta1_g*pi/180; matlab_th2 = matlab_th1+theta2_g*pi/180; x1_t=x1_g*cos(matlab_th1); % So that prismatic joint 1 is always on top of revolute joint 1(circle) y1_t=y1_g+ r_g*sin(matlab_th1); Tm1 = [ cos(matlab_th1) -sin(matlab_th1) 0 x1_t % Transform to frame '1' sin(matlab_th1) cos(matlab_th1) 0 y1_t 0 0 1 0 0 0 0 1 ];](https://image.slidesharecdn.com/rprp3rpr-1228595050196684-8/85/Rprp-3-Rpr-4-320.jpg)
![HOW DO WE APPLY CONTROL ?? xd=(xc+R*cos(w*t)); yd=(yc+R*sin(w*t)); ErrorX=[ (xd-x); (yd-y) ]; K=[g 0; 0 g]; error_correction = jacobian_i*K*ErrorX; qdot=jacobian_i*Xdot + error_correction ;](https://image.slidesharecdn.com/rprp3rpr-1228595050196684-8/85/Rprp-3-Rpr-5-320.jpg)

![HOW TO DO TRAJECTORY TRACING ?? J1 = [ -d1*sin(theta1) cos(theta1) -k*sin(theta4); d1*cos(theta1) sin(theta1) k*cos(theta4); 1 0 1]; Similarly calculate J2 and J3; M = [ J1, -J2, zeros(3); J1, zeros(3), -J3]; theta_dependant_dot = -inv(M2)*M1*theta_independant_dot; M1 = matrix of rates of independent variables M2 = matrix of rates of dependent variables theta_dot = [ theta1_dot, d1_dot, theta4_dot, theta2_dot, d2_dot, theta5_dot, theta3_dot, d3_dot, theta6_dot ]'; Integrate theta_dot to get all the joint variables. Then use forward kinematics to plot.](https://image.slidesharecdn.com/rprp3rpr-1228595050196684-8/85/Rprp-3-Rpr-17-320.jpg)















![[Question Paper] Electronic & Tele Communication System (Old Course) [Septemb...](https://cdn.slidesharecdn.com/ss_thumbnails/etcs-qpoldcoursesep-2013-170714203200-thumbnail.jpg?width=640&height=640&fit=bounds)