ROBOTICS AND AI [ARTIFICIAL INTELLIGENCE] PROJECT.pptx
1.
ROBOTICS AND AI[ARTIFICIAL
INTELLIGENCE] PROJECT
WORK
Submitted To-: Saurabh Sir
Submitted By-: Kanishk Nagar
Class-: X A
Roll no.-: 21
2.
acknowledment
I would liketo express my sincere gratitude to everyone who supported me throughout
the course of this project. First and foremost, my deepest thanks go to [Saurabh
sharma sir], whose guidance, encouragement, and valuable feedback were crucial
to the successful completion of this work.
I am also grateful to [st joseph’s school] for providing the necessary resources and a
conducive environment to carry out this project.
Special thanks to my parents and friend for their collaboration, insightful discussions,
and moral support. I am particularly appreciative of my family and friends for their
unwavering patience and belief in me, even during the most challenging moments.
This work would not have been possible without the collective effort and support of all
those mentioned and many others who have contributed in various ways.
Thank you
- KANISHK NAGAR
GEARS
In robotics, gearsare mechanical
components with teeth that mesh together to
transmit power and motion. They are
essential for controlling torque, speed, and
direction in robots, allowing them to perform
tasks that would otherwise be impossible with
a direct motor connection.
5.
Key Characteristic OfGears
Speed and Torque:
Gears can increase or decrease speed while increasing or decreasing torque, allowing robots to perform t
requiring different power levels.
Direction of Rotation:
Gears can change the direction of rotation, enabling robots to perform complex movements.
Shaft Alignment:
Gears can change the angle of shaft alignment, allowing robots to move in various directions.
6.
Here's a moredetailed look at their characteristics:
. Torque and Speed Adjustment: Gears can be used to increase or
decrease the speed of a motor, while simultaneously amplifying or reducing torque. This
is crucial for robots to perform tasks requiring both fine control and powerful movements.
Direction Change: Gear systems can be designed to change the direction
of rotation, allowing robots to move in different directions or control complex
movements.
Shaft Alignment: Gears can also change the orientation of the shafts,
allowing for different types of movement and power transmission.
7.
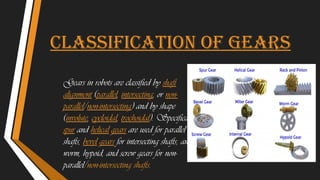
Classification of gears
Gearsin robots are classified by shaft
alignment (parallel, intersecting, or non-
parallel/non-intersecting) and by shape
(involute, cycloidal, trochoidal). Specifically,
spur and helical gears are used for parallel
shafts, bevel gears for intersecting shafts, and
worm, hypoid, and screw gears for non-
parallel/non-intersecting shafts.
8.
SPUR GEAR
Spur gears,with their straight teeth and parallel
shaft placement, are a common and effective choice for
robotic applications, particularly in controlling speed
and torque. They are simple to design and
manufacture, making them ideal for applications
where parallel shaft movement is required.
Helical gear
Helical gears, with their angled teeth, are often used
in robots for their smooth, quiet, and efficient power
transmission. They excel in applications where high
torque and speed reduction are needed, such as in
robot arms and manipulators. Compared to spur
gears, helical gears offer greater load-carrying
capacity, reduced noise and vibration, and smoother
operation.
9.
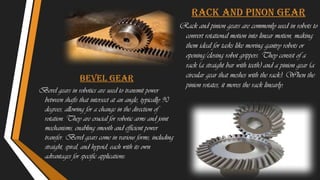
bevel gear
Bevel gearsin robotics are used to transmit power
between shafts that intersect at an angle, typically 90
degrees, allowing for a change in the direction of
rotation. They are crucial for robotic arms and joint
mechanisms, enabling smooth and efficient power
transfer. Bevel gears come in various forms, including
straight, spiral, and hypoid, each with its own
advantages for specific applications.
Rack and pinon gear
Rack and pinion gears are commonly used in robots to
convert rotational motion into linear motion, making
them ideal for tasks like moving gantry robots or
opening/closing robot grippers. They consist of a
rack (a straight bar with teeth) and a pinion gear (a
circular gear that meshes with the rack). When the
pinion rotates, it moves the rack linearly.
10.
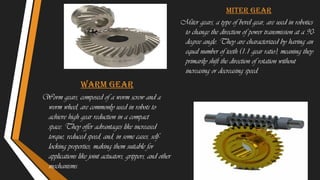
Warm gear
Worm gears,composed of a worm screw and a
worm wheel, are commonly used in robots to
achieve high gear reduction in a compact
space. They offer advantages like increased
torque, reduced speed, and, in some cases, self-
locking properties, making them suitable for
applications like joint actuators, grippers, and other
mechanisms.
Miter gear
Miter gears, a type of bevel gear, are used in robotics
to change the direction of power transmission at a 90-
degree angle. They are characterized by having an
equal number of teeth (1:1 gear ratio), meaning they
primarily shift the direction of rotation without
increasing or decreasing speed.
11.
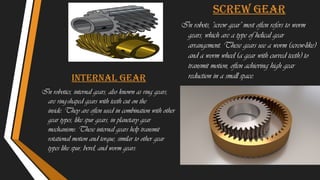
Internal gear
In robotics,internal gears, also known as ring gears,
are ring-shaped gears with teeth cut on the
inside. They are often used in combination with other
gear types, like spur gears, in planetary gear
mechanisms. These internal gears help transmit
rotational motion and torque, similar to other gear
types like spur, bevel, and worm gears.
Screw gear
In robots, "screw gear" most often refers to worm
gears, which are a type of helical gear
arrangement. These gears use a worm (screw-like)
and a worm wheel (a gear with curved teeth) to
transmit motion, often achieving high gear
reduction in a small space.
12.
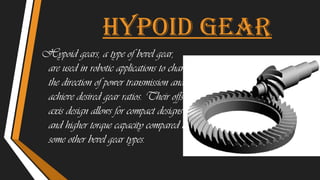
Hypoid gear
Hypoid gears,a type of bevel gear,
are used in robotic applications to change
the direction of power transmission and
achieve desired gear ratios. Their offset
axis design allows for compact designs
and higher torque capacity compared to
some other bevel gear types.
13.
Uses Of Gears
Gearsplay a crucial role in robots, enabling them to
perform various tasks by controlling speed, torque, and
direction of motion. They are essential for converting
motor power into precise movements, particularly in
applications requiring accuracy and
efficiency. Gears also allow robots to adjust their
speed and torque for differenttasks, optimizing
performance and reducing theeed for multiple motors.
14.
On the basicsSpeed and Torque Control:-
Speed Reduction
Gears can reduce the speed of a motor while increasing the torque, making it
suitable for heavy lifting or precise movements.
Speed Increase:
Conversely, gears can increase the speed of a motor, allowing for faster
movement in certain applications.
Torque Amplification:
By using larger gears, the torque of a motor can be amplified, providing more
power for tasks like lifting heavy objects or gripping tightly.
15.
On the basicschange in direction:-
Rotational Direction:
Gears can be used to change the direction of rotation, enabling robots
to perform tasks that require movement in different directions.
Translating Motion:
Gears can also be used to change rotational motion into linear motion,
allowing robots to move in straight lines.
16.
On the basisof Versatility and Adaptability:
•Changing Gear Ratios:
•By adjusting the gear ratios, robots can adapt to different tasks and
situations, from fast, light tasks to slower, heavy jobs.
•Efficiency and Performance:
•Gears allow robots to operate efficiently and at maximum performance
by converting motor power into appropriate movements.
17.
On the basicsPrecision and Smooth Movement:-
Smooth and Accurate Movement:
Gears help robots make smooth and precise movements, crucial for tasks requiring
accuracy, like assembling small components or performing surgical procedures.
Gear Ratios:
By adjusting gear ratios, engineers can create robots that are optimized for
various tasks, ranging from fast and light tasks to slower and heavier jobs.
18.
SENSOR
A sensor isa device that detects and responds
to input from the physical environment,
converting it into a measurable
signal. These signals can then be
displayed, read, or processed
further. Essentially, sensors act as the "eyes
and ears" for a system, allowing it to interact
with and understand its surroundings.
19.
Key Characteristic ofSensor
Key sensor characteristics include sensitivity,
linearity, resolution, and accuracy. Sensitivity
refers to the sensor's ability to detect small
changes in the measured quantity. Linearity
describes how well the sensor's output changes
proportionally to the input. Resolution is the
smallest change in the measured quantity that
the sensor can detect. Accuracy refers to how
close the sensor's reading is to the true value.
20.
Sensitivity:
A high sensitivitymeans the sensor can detect small changes in
the measured quantity, making it useful in applications where
precise measurements are needed.
Linearity:
A linear sensor's output changes proportionally to the input. This
means the sensor's output is a straight line when plotted against the
input.
Resolution:
Resolution is the smallest change in the measured quantity that
the sensor can detect and represent as a distinct output.
Accuracy:
Accuracy describes how close the sensor's reading is to the true
value of the measured quantity. It's often expressed as a
percentage of the full scale or reading.
21.
Classification of Senor
Sensorscan be classified in several ways,
including by their output signal (analog or
digital), the physical quantity they measure,
and whether they require an external power
source (active or passive). Another
classification method divides them based on
whether they make contact with the object
being measured (contact vs. non-contact).
22.
Ir sensor transmissiontype
An infrared sensor (IR sensor) is a radiation-sensitive
optoelectronic component with a spectral sensitivity in the
infrared wavelength range 780 nm … 50 µm. IR
sensors are now widely used in motion detectors, which
are used in building services to switch on lamps or in
alarm systems to detect unwelcome guests.
Themster [temperature
sensor]
A temperature sensor is a device used to measure
temperature. This can be air temperature, liquid
temperature or the temperature of solid matter.
There are different types of temperature sensors
available and they each use different technologies
and principles to take the temperature measurement.
23.
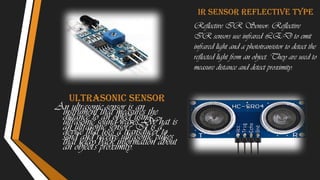
Ultrasonic sensor
An ultrasonicsensor is an
instrument that measures the
distance to an object using
ultrasonic sound waves. What is
an ultrasonic sensor? It is a
device that uses a transducer to
send and receive ultrasonic pulses
that relay back information about
an object's proximity.
Ir sensor reflective type
Reflective IR Sensor: Reflective
IR sensors use infrared LED to emit
infrared light and a phototransistor to detect the
reflected light from an object. They are used to
measure distance and detect proximity.
24.
Accelerometer sensor
An accelerometersensor is a tool that measures the
acceleration of any body or object in its instantaneous rest
frame. It is not a coordinate acceleration.
Accelerometer sensors are used in many ways, such as in
many electronic devices, smartphones, and wearable
devices, etc.
Gyroscope sensor
Gyroscopic sensors ("gyro sensors") are one type of motion sensing
device. They are capable of sensing movements that are
difficult for humans to detect, such as rotation and changes in
orientation.
25.
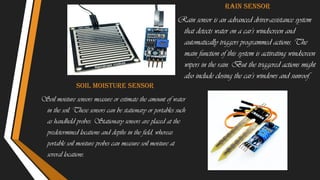
Soil moisture sensor
Soilmoisture sensors measure or estimate the amount of water
in the soil. These sensors can be stationary or portables such
as handheld probes. Stationary sensors are placed at the
predetermined locations and depths in the field, whereas
portable soil moisture probes can measure soil moisture at
several locations.
Rain sensor
Rain sensor is an advanced driver-assistance system
that detects water on a car's windscreen and
automatically triggers programmed actions. The
main function of this system is activating windscreen
wipers in the rain. But the triggered actions might
also include closing the car's windows and sunroof.
26.
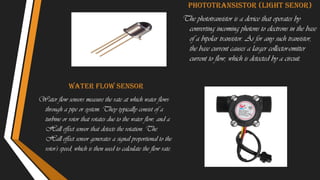
Water flow sensor
Waterflow sensors measure the rate at which water flows
through a pipe or system. They typically consist of a
turbine or rotor that rotates due to the water flow, and a
Hall effect sensor that detects the rotation. The
Hall effect sensor generates a signal proportional to the
rotor's speed, which is then used to calculate the flow rate.
Phototransistor (light senor)
The phototransistor is a device that operates by
converting incoming photons to electrons in the base
of a bipolar transistor. As for any such transistor,
the base current causes a larger collector-emitter
current to flow, which is detected by a circuit.
27.
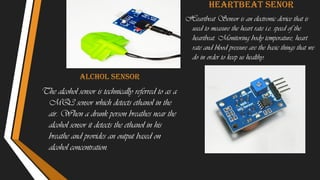
Alchol sensor
The alcoholsensor is technically referred to as a
MQ3 sensor which detects ethanol in the
air. When a drunk person breathes near the
alcohol sensor it detects the ethanol in his
breathe and provides an output based on
alcohol concentration.
Heartbeat senor
Heartbeat Sensor is an electronic device that is
used to measure the heart rate i.e. speed of the
heartbeat. Monitoring body temperature, heart
rate and blood pressure are the basic things that we
do in order to keep us healthy.
28.
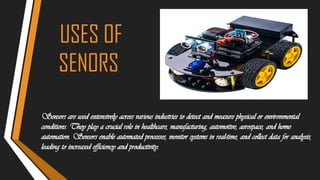
USES OF
SENORS
Sensors areused extensively across various industries to detect and measure physical or environmental
conditions. They play a crucial role in healthcare, manufacturing, automotive, aerospace, and home
automation. Sensors enable automated processes, monitor systems in real-time, and collect data for analysis,
leading to increased efficiency and productivity.
29.
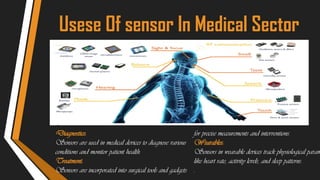
Usese Of sensorIn Medical Sector
Diagnostics:
Sensors are used in medical devices to diagnose various
conditions and monitor patient health.
Treatment:
Sensors are incorporated into surgical tools and gadgets
for precise measurements and interventions.
Wearables:
Sensors in wearable devices track physiological param
like heart rate, activity levels, and sleep patterns.
.
30.
Uses Of sensorIn Automative Sector
Safety:
Sensors are used for anti-lock braking systems
(ABS), airbag deployment, and parking assist
systems.
Real-time Data:
Sensors provide real-time data on vehicle performance
and engine parameters.
Autonomous Driving:
Sensors are crucial for autonomous vehicles, enabling
them to perceive and navigate their surroundings.
31.
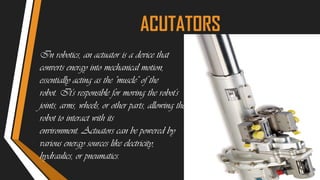
In robotics, anactuator is a device that
converts energy into mechanical motion,
essentially acting as the "muscle" of the
robot. It's responsible for moving the robot's
joints, arms, wheels, or other parts, allowing the
robot to interact with its
environment. Actuators can be powered by
various energy sources like electricity,
hydraulics, or pneumatics.
ACUTATORS
32.
More Detail ExplanatoionOn The Characteristic-:
1. Type of Motion:
Linear: Move in a straight line, like a piston.Rotary: Spin or rotate, like a motor.
2. Energy Source:
Electric: Use electrical energy, often fro motors or servos.
Pneumatic: Use compressed air, often in cylinders.
Hydraulic: Use pressurized fluids, like hydraulic pumps.
3. Force Output:
Torque: The rotational force a rotary actuator produces.
Force: The linear force a linear actuator can generate.
33.
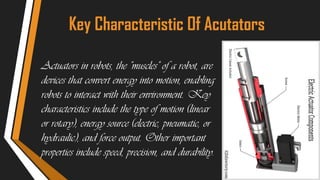
Key Characteristic OfAcutators
Actuators in robots, the "muscles" of a robot, are
devices that convert energy into motion, enabling
robots to interact with their environment. Key
characteristics include the type of motion (linear
or rotary), energy source (electric, pneumatic, or
hydraulic), and force output. Other important
properties include speed, precision, and durability.
34.
Classification Of Acutators
CLASSIFICTIONOF ACUTATORS
BY MOTION
Linear motion
Hydralic acutators
CLASSIFICATION OF ACUTATORS BY ENERGY SOURCE
Pneumatic Actuators
Hydralic acutators
Electric acutators
Thermal acutators
Mechanical Acutators
Magnetic acutators
35.
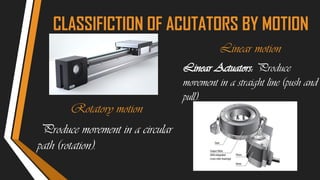
CLASSIFICTION OF ACUTATORSBY MOTION
Linear motion
Linear Actuators: Produce
movement in a straight line (push and
pull).
Rotatory motion
Produce movement in a circular
path (rotation).
36.
CLASSIFICATION OF ACUTATORSBY ENERGY SOURCE
Hydralic acutators
Use pressurized fluid
(typically oil) to generate
movement.
Pneumatic Actuators
Use compressed air to
generate movement.
37.
Thermal acutators
Use thermalenergy to
generate movement.
Electric acutators
Use electrical energy to
generate movement.
38.
Mechanical Acutators
Use gears,levers, and other
mechanical components to
produce movement.
Magnetic Acutators
Use magnetic forces to
generate movement.
39.
Uses Of Acutators-:
Actuatorsare versatile devices that convert energy into mechanical motion,
enabling control and automation in numerous applications. They are used
in robotics, industrial automation, aerospace, medical devices, and even smart
homes.
Acutators are used in following fields-
Robots and automation
Industrial automation
many morE..
40.
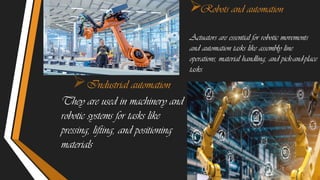
Industrial automation
They areused in machinery and
robotic systems for tasks like
pressing, lifting, and positioning
materials
Robots and automation
Actuators are essential for robotic movements
and automation tasks like assembly line
operations, material handling, and pick-and-place
tasks.
41.
CONTROLLER
In robotics, acontroller is the brain and
central command center of a robot, responsible
for managing its movements, functions, and
interactions with its environment. It interprets
programming instructions, coordinates the
robot's actions, and ensures it performs tasks
according to its intended purpose
42.
Key Characteristics OfControllers-:
A key characteristic of a robot controller is its ability to process information
and translate it into precise movements, enabling the robot to perform tasks
autonomously or in response to external commands. This involves real-time
data processing, algorithms, and potentially machine learning to make decisions
and adapt to changing environments.
43.
• Centralized Control:
Robotcontrollers act as the central nervous system, integrating inputs from sensors, processing them,
and outputting signals to actuators (motors, etc.) to control the robot's actions.
• Real-time Processing:
Controllers must process information and execute commands quickly, often in milliseconds, to ensure
smooth and accurate movements.
• Feedback Loop:
Many robots operate using a feedback loop, where sensors provide information about the robot's
environment and current state, which is then used to adjust the controller's output and maintain desired
behavior, like balancing or navigating.
• Autonomous Operation:
Autonomous robots rely on their controllers to make decisions and react to the environment without
direct human intervention. This may involve pattern recognition, path planning, and other decision-
making process..
44.
CLASSIFICATION OF CONTROLLER-:
BasedOn Control Methods
Point-to-point Control
Continuous Path
Control:
Controlled-path
Robots
Hierarchical Control:
Low-level
Control
Interaction
Strategy Level:.
Supervisory
Level:
45.
Based On ControlMethods
•Point-to-Point Control:
Robots move between programmed points, with the controller calculating
the path between them.
•Continuous Path Control:
The robot follows a pre-defined path, with the controller maintaining
control of the entire motion via closed-loop feedback.
•Controlled-Path Robots:
These robots can generate complex paths with high precision, suitable for
applications requiring accurate and intricate movements
46.
Hierarchical Control:
• Low-LevelControl:
• Focuses on physical interaction, ensuring the robot's actuators and sensors operate
correctly.
• Interaction Strategy Level:
• Defines the sequence of physical actions over time, dictating how the robot interacts with
its environment.
• Supervisory Level:
• Manages higher-level tasks and parameters, adapting to changing conditions and goals.
47.
Uses Of Controllers
Controllersare essential for robots, functioning as their "brains"
by interpreting programming and directing their actions. They
manage movements, process sensor data, and enable robots to
interact with their environment and other systems.
48.
•Movement and control:
Controllerstranslate programming into precise movements, controlling the robot's
arm, end-effector, and other actuators. They manage torque, velocity, and
positioning, ensuring accurate execution of tasks.
•Data processing and decision-making:
Controllers process information from sensors, enabling the robot to make decisions
and respond to its surroundings. They can handle tasks ranging from simple
motor control to complex decision-making processes.
•Interface and communication:
Controllers act as a bridge between the robot and other devices, including sensors,
external systems, and even other robots. They manage communication and ensure
data flow between different components.
49.
conclusion
In an AIproject focusing on gears, actuators, sensors, and
controllers, the conclusion typically highlights the successful integration of
these components, showcasing how AI can enhance their performance
and functionality. This integration enables intelligent systems that can
react to real-time data, make autonomous decisions, and optimize various
processes, ultimately leading to more efficient and reliable systems.
![ROBOTICS AND AI [ARTIFICIAL
INTELLIGENCE] PROJECT
WORK
Submitted To-: Saurabh Sir
Submitted By-: Kanishk Nagar
Class-: X A
Roll no.-: 21](https://image.slidesharecdn.com/roboticsandaiartificialintelligenceproject-250622063148-d373ec7c/85/ROBOTICS-AND-AI-ARTIFICIAL-INTELLIGENCE-PROJECT-pptx-1-320.jpg)
![acknowledment
I would like to express my sincere gratitude to everyone who supported me throughout
the course of this project. First and foremost, my deepest thanks go to [Saurabh
sharma sir], whose guidance, encouragement, and valuable feedback were crucial
to the successful completion of this work.
I am also grateful to [st joseph’s school] for providing the necessary resources and a
conducive environment to carry out this project.
Special thanks to my parents and friend for their collaboration, insightful discussions,
and moral support. I am particularly appreciative of my family and friends for their
unwavering patience and belief in me, even during the most challenging moments.
This work would not have been possible without the collective effort and support of all
those mentioned and many others who have contributed in various ways.
Thank you
- KANISHK NAGAR](https://image.slidesharecdn.com/roboticsandaiartificialintelligenceproject-250622063148-d373ec7c/85/ROBOTICS-AND-AI-ARTIFICIAL-INTELLIGENCE-PROJECT-pptx-2-320.jpg)



![Ir sensor transmission type
An infrared sensor (IR sensor) is a radiation-sensitive
optoelectronic component with a spectral sensitivity in the
infrared wavelength range 780 nm … 50 µm. IR
sensors are now widely used in motion detectors, which
are used in building services to switch on lamps or in
alarm systems to detect unwelcome guests.
Themster [temperature
sensor]
A temperature sensor is a device used to measure
temperature. This can be air temperature, liquid
temperature or the temperature of solid matter.
There are different types of temperature sensors
available and they each use different technologies
and principles to take the temperature measurement.](https://image.slidesharecdn.com/roboticsandaiartificialintelligenceproject-250622063148-d373ec7c/85/ROBOTICS-AND-AI-ARTIFICIAL-INTELLIGENCE-PROJECT-pptx-22-320.jpg)