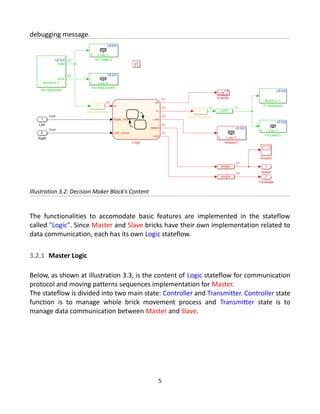
The document describes a project to implement coordinated movement between two robots (Lego bricks). The master brick generates and performs random sequences of movement patterns (sets of motions). It sends the command number to the slave brick using Bluetooth communication. The master waits for an acknowledgement from the slave before moving to the next command. Fourteen predefined primitive and complex movements are implemented. The master's logic is divided into controller and transmitter states to manage movement and communication. The slave brick has its own logic stateflow to receive and execute the transmitted commands from the master.






![Command is executed as Lego's movement at PerformAction state, after it finishes, it
will check whether Slave has also finished before executing the next command in the
list.
3.2.1.1.1 Function Init Source Code
function Init
cnt=0;
pNum=1;
isCompleted=0;
speed=0;
turn=0;
N_ACT = 7; % number of actions
RETRANS = 5; % number of retransmissions if ack was not received
COM_DELAY = 0.2; % min communication delay between messages
ACT_TIMEOUT = 1; % max time required for action
node = Action.Master; % Apply appropriate constants for moving master
patterns=[
[4,9,11,4,4];% forward - snake - circle - back - back
[4,13,4,13,5]; %back - goon - back - goon - forward
[5,10,12,14,5];]; % forward - back snake - back circle - vertigo – forward
This function is used to init every local variables used and define the patterns that Lego
brick could use as matrix.
3.2.1.1.2 Function ChangeMotion Source Code
function r_cmd = ChangeMotion
cnt=cnt+1;
if(cnt>5)
cnt=1;
if(pNum==size(patterns,2))
pNum=1;
else
pNum=pNum+1;
end
end
r_cmd = patterns(pNum,cnt);
8](https://image.slidesharecdn.com/4aa745f5-61ca-46f3-95c8-48b6df8a288b-150609192043-lva1-app6891/85/project_reportv2-8-320.jpg)
![This function will do an endless loop access to every index in matrix patterns in row-
column fashion sequentially and to give the output as commands. Note:
size(patterns,2) should have been size(patterns,1), see section 5 Conclusion.
3.2.1.1.3 PerformAction State
This is stateflow for executing commands into movements, master and slave have the
same kind of PerformAction state to execute commands, in order to ensure that they
could move similarly. Each primitive commands corresponds to a different parameters
given as inputs for Movement state, as shown at illustration 3.5. A different parameter
would result in a different "moving action" being executed by Lego brick.
Parameters =
{ action=[Action.TurnRight/Action.TurnLeft/Action.Move];
direction=[Direction.Backward/Direction.Forward];
distance=[degree(right-left)/ centimeters(backward-forward)] }
Action is used to tell lego's action: turning left, turning right, or straight (move).
Direction is used to tell lego's direction: backward, forward.
Distance is used to tell lego how much the direction should be, for right-left the input
should be turning angle in degree, while for backward-forward the input should be
distance in centimeters.
For more complicated movement which is shown as the last six commands at
illustration 3.5, each commands is built using a slightly modified Movement state and
extra stateflow as shown at 3.2.1.1.6..
In order to create a smooth movement, we need to keep track of the motor output
rotation using the Lego block- Motor Encoder. This block will give the current sum of
motor rotation in degree at that moment. Both master and slave motors have a slightly
different output, so to make a smoother turning movement, we have to use differents
constant as offset not only master and slave but also left and right direction as seen at
3.2.1.1.5. Init_move function source code.
9](https://image.slidesharecdn.com/4aa745f5-61ca-46f3-95c8-48b6df8a288b-150609192043-lva1-app6891/85/project_reportv2-9-320.jpg)





































