The 8th International Conference on Intelligent Robotics and Control Engineering, Kunming China, August 18-21, 2025
Abstract
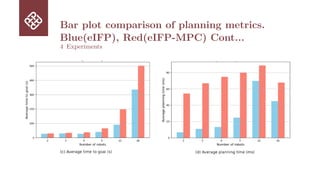
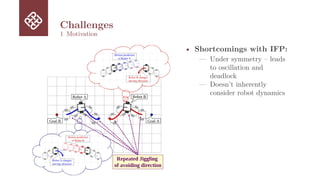
The Iterative Forecast Planner (IFP) is a geometric planning approach that offers lightweight computations, scalable, and reactive solutions for multi-robot path planning in decentralized, communication-free settings. However, it struggles in symmetric configurations, where mirrored interactions often lead to collisions and deadlocks. We introduce eIFP-MPC, an optimized and extended version of IFP that improves robustness and path consistency in dense, dynamic environments. The
method refines threat prioritization using a time-to-collision heuristic, stabilizes path generation through cost-based via-point selection, and ensures dynamic feasibility by incorporating model predictive control (MPC) into the planning process. These enhancements are tightly integrated into the IFP to preserve its efficiency while improving its adaptability and stability. Extensive simulations across symmetric and high-density scenarios show that eIFP-MPC significantly reduces oscillations, ensures
collision-free motion, and improves trajectory efficiency. The results demonstrate that geometric planners can be strengthened through optimization, enabling robust performance at scale in complex multi-agent environments.
Paper: https://arxiv.org/abs/2508.08264



![Robot Model
(Discrete unicycle dynamics)
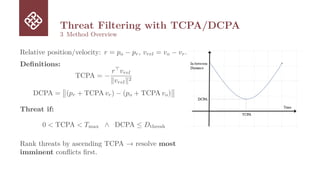
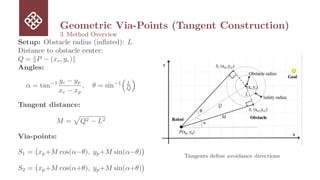
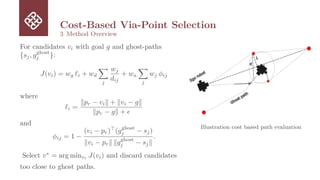
3 Method Overview
State xk = [x, y, θ]⊤
, control uk = [v, ω]⊤
, ∆t sampling:
xk+1 =
xk + vk cos θk ∆t
yk + vk sin θk ∆t
θk + ωk ∆t
, v ∈ [vmin, vmax], ω ∈ [ωmin, ωmax]](https://image.slidesharecdn.com/presentationforecastdrivenmpcfordecentralizedmultirobotcollisionavoidance-250829212543-17000f03/85/Forecast-Driven-MPC-for-Decentralized-Multi-Robot-Collision-Avoidance-10-320.jpg)

![Trajectory Smoothing MPC Tracking
3 Method Overview
After selecting a via-point, the robot smooths waypoints and tracks them with MPC.
Spline Smoothing:
p(t) =
Sx(t)
Sy(t)
, t ∈ [0, 1]
Continuous cubic splines {Sx, Sy} provide positions derivatives.
Unicycle Dynamics:
xk+1 =
xk + vk cos θk ∆t
yk + vk sin θk ∆t
θk + ωk ∆t
MPC Optimization:
min
{uk}
N−1
X
k=0
∥xk − xref
k ∥2
Q + ∥uk∥2
R
subject to input bounds vmin ≤ vk ≤ vmax, ωmin ≤ ωk ≤ ωmax.
Predicted obstacles can be added as inequality constraints.](https://image.slidesharecdn.com/presentationforecastdrivenmpcfordecentralizedmultirobotcollisionavoidance-250829212543-17000f03/85/Forecast-Driven-MPC-for-Decentralized-Multi-Robot-Collision-Avoidance-16-320.jpg)