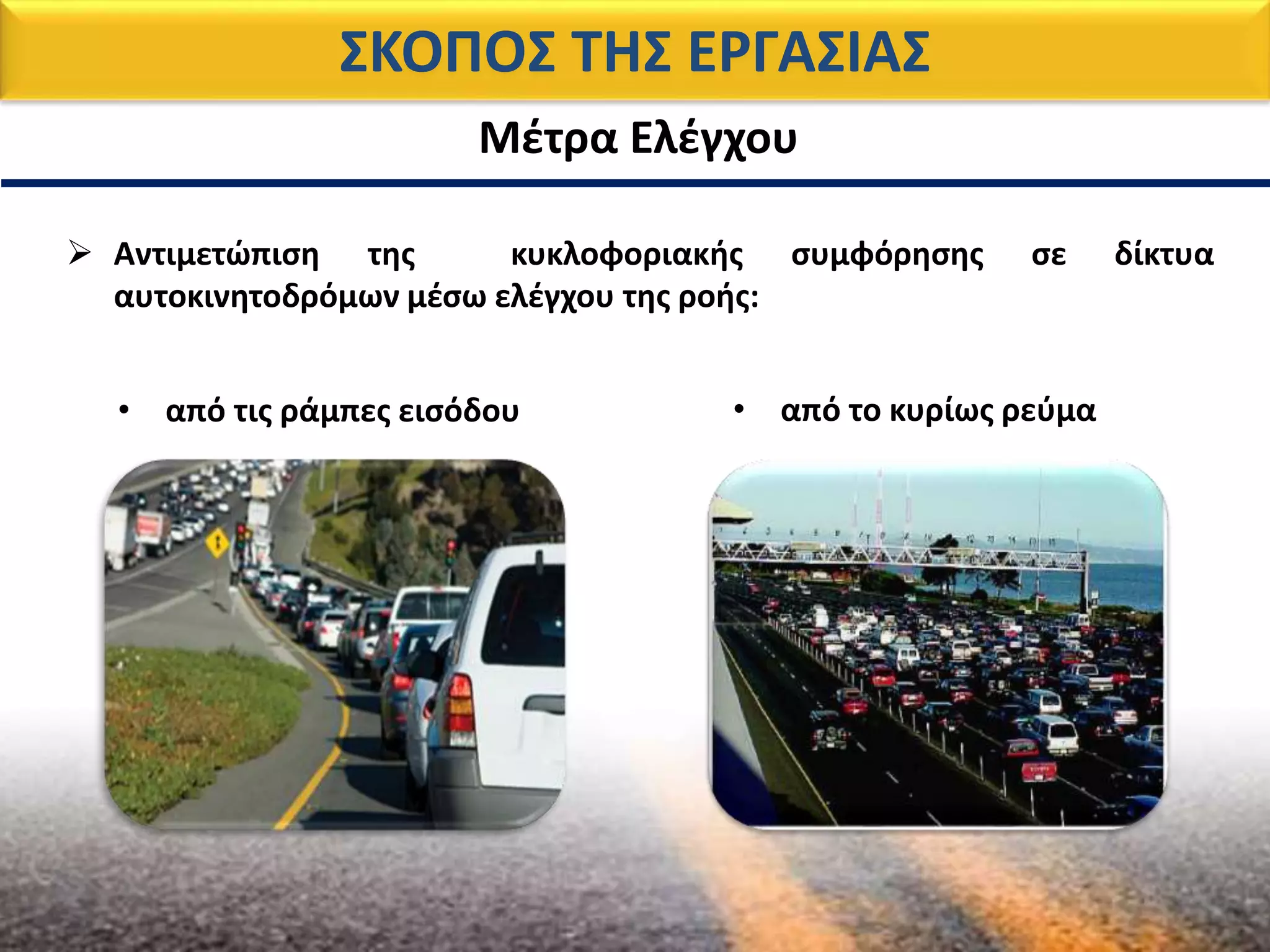
ΣΚΟΠΟΣ ΤΗΣ ΕΡΓΑΣΙΑΣ
Αντιμετώπιση της κυκλοφοριακής συμφόρησης σε δίκτυα
αυτοκινητοδρόμων μέσω ελέγχου της ροής:
Μέτρα Ελέγχου
• από το κυρίως ρεύμα• από τις ράμπες εισόδου
4.
ΣΚΟΠΟΣ ΤΗΣ ΕΡΓΑΣΙΑΣ
ΣτρατηγικήΕλέγχου
* I. Karafyllis, M. Kontorinaki, and M. Papageorgiou, “Robust global adaptive
exponential stabilization of discrete-time systems with application to freeway
traffic control,” submitted to the IEEE Transactions on Automatic Control
Σχήμα Προσαρμοστικού Ελέγχου (ΣΠΕ) *
• Στρατηγική Πραγματικού Χρόνου (Real-Time Control Strategies)
• Εφαρμογή Τοπικό ή/και Συντονισμένο ‘Έλεγχο
• Εγγυάται την Εύρωστη Ολική Εκθετική Ευστάθεια (ΕΟΕΕ) του
Επιθυμητού Σημείου Ισορροπίας.
5.
ΣΚΟΠΟΣ ΤΗΣ ΕΡΓΑΣΙΑΣ
Υλοποίηση
•Χρήση ενός μη γραμμικού, πρώτης τάξης, μακροσκοπικού μοντέλου
• Αναπτύχθηκαν ρεαλιστικά σενάρια κυκλοφορίας για διαφορετικές
τοπολογίες αυτοκινητοδρόμων
• Διερεύνηση της απόδοσης του ΣΠΕ σε διάφορα σενάρια
κυκλοφορίας
• Πραγματοποιείται σύγκριση των αποτελεσμάτων με έναν άλλο ελεγκτή
(RLB-PI)* που έχει εφαρμοστεί στο πεδίο.
*Y. Wang, M. Papageorgiou, J. Gaffney, I. Papamichail, G. Rose, and W. Young, “Local ramp
metering in random-location bottlenecks downstream of metered on-ramp,”
Transportation Research Record, Journal of Transportation Research Board, vol. 2178, pp.
90–100, 2010.
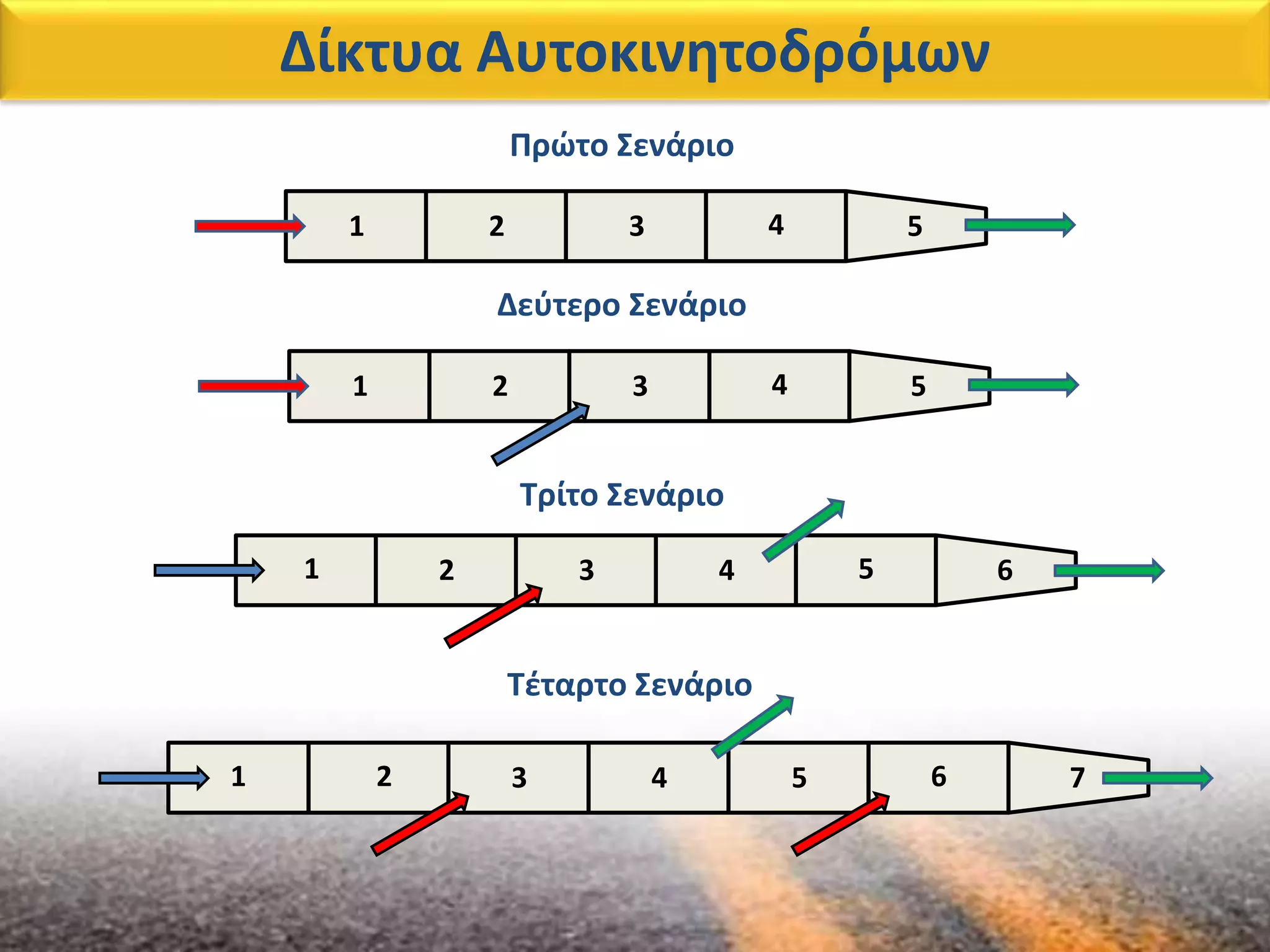
1 2 in-1 n
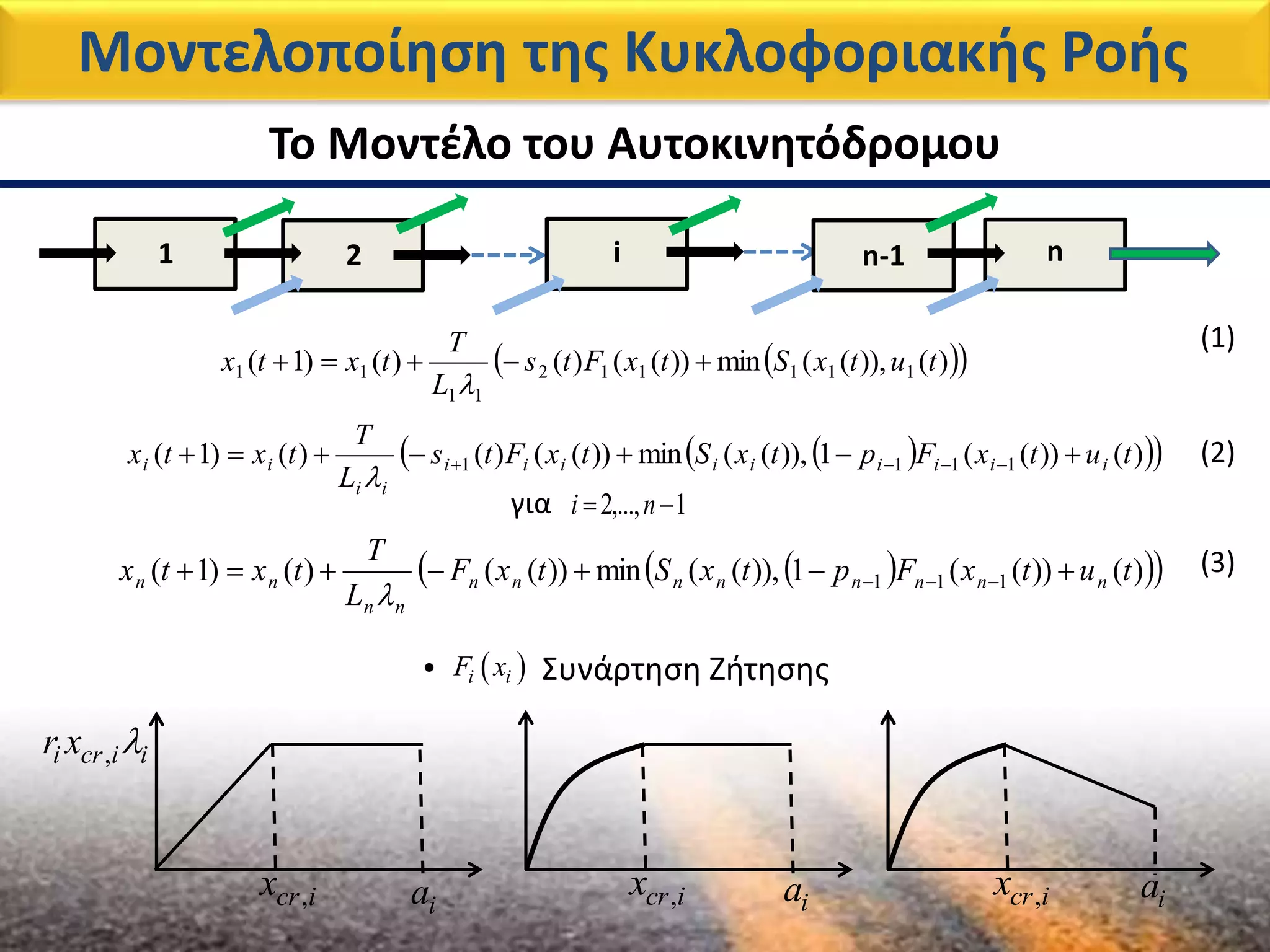
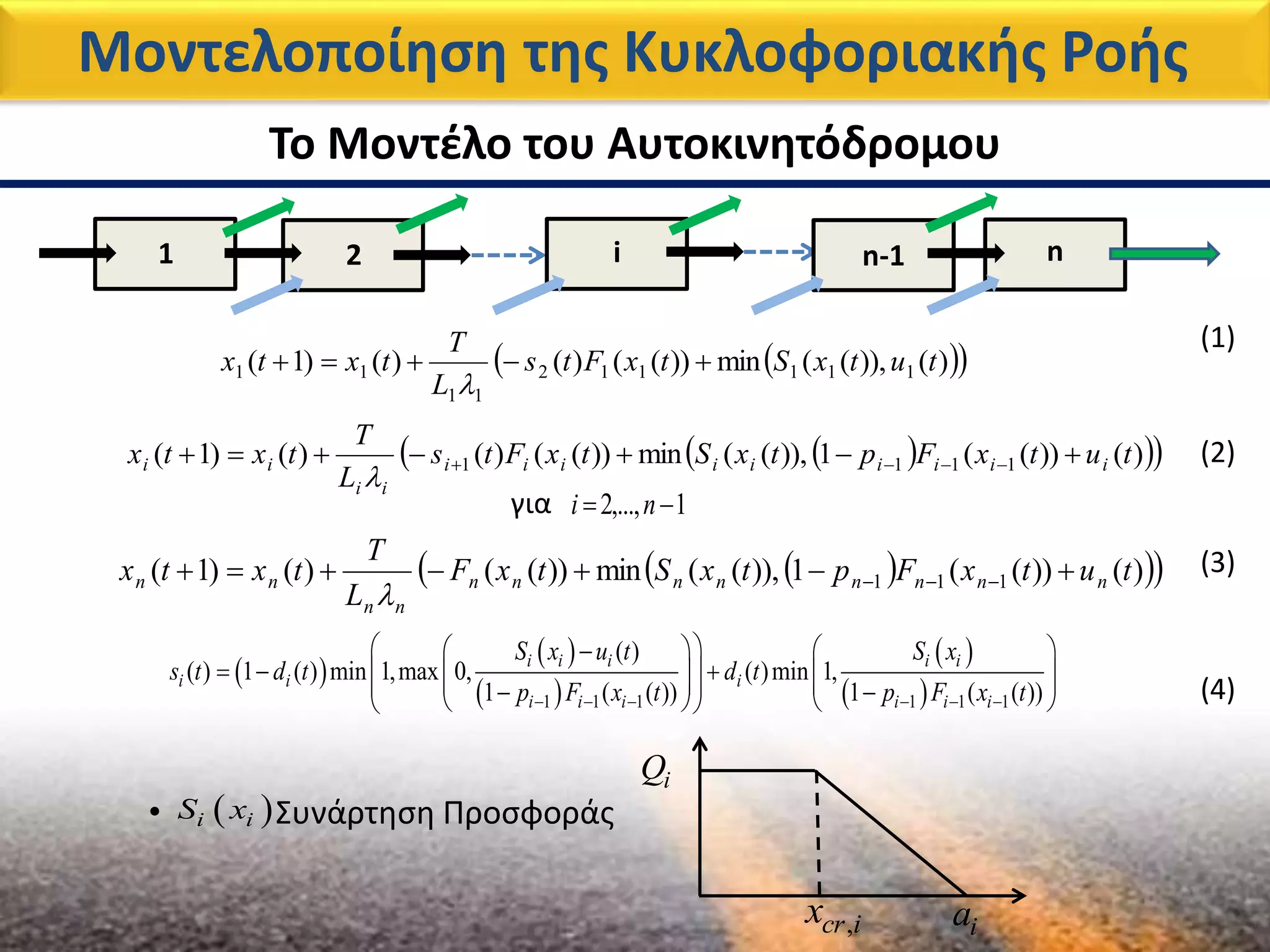
Μοντελοποίηση της Κυκλοφοριακής Ροής
Το Μοντέλο του Αυτοκινητόδρομου
)()),((min))(()()()1( 111112
11
11 tutxStxFts
L
T
txtx
)())((1)),((min))(()()()1( 1111 tutxFptxStxFts
L
T
txtx iiiiiiiii
ii
ii
για 1,...,2 ni
)())((1)),((min))(()()1( 111 tutxFptxStxF
L
T
txtx nnnnnnnn
nn
nn
1 1 1 1 1 1
( )
( ) 1 ( ) min 1,max 0, ( )min 1,
1 ( ( )) 1 ( ( ))
i i i i i
i i i
i i i i i i
S x u t S x
s t d t d t
p F x t p F x t
(1)
(2)
(3)
(4)
• Πυκνότητα , σε veh/km/lane όπου],0[)( ii atx t kT
• Μέγιστη Πυκνότητα0ia
8.
1 2 in-1 n
Μοντελοποίηση της Κυκλοφοριακής Ροής
Το Μοντέλο του Αυτοκινητόδρομου
)()),((min))(()()()1( 111112
11
11 tutxStxFts
L
T
txtx
)())((1)),((min))(()()()1( 1111 tutxFptxStxFts
L
T
txtx iiiiiiiii
ii
ii
για 1,...,2 ni
)())((1)),((min))(()()1( 111 tutxFptxStxF
L
T
txtx nnnnnnnn
nn
nn
(1)
(2)
(3)
• Συνάρτηση Ζήτησης i iF x
ia ia ia,cr ix ,cr ix ,cr ix
,i cr i ir x
9.
1 2 in-1 n
Μοντελοποίηση της Κυκλοφοριακής Ροής
Το Μοντέλο του Αυτοκινητόδρομου
)()),((min))(()()()1( 111112
11
11 tutxStxFts
L
T
txtx
)())((1)),((min))(()()()1( 1111 tutxFptxStxFts
L
T
txtx iiiiiiiii
ii
ii
για 1,...,2 ni
)())((1)),((min))(()()1( 111 tutxFptxStxF
L
T
txtx nnnnnnnn
nn
nn
1 1 1 1 1 1
( )
( ) 1 ( ) min 1,max 0, ( )min 1,
1 ( ( )) 1 ( ( ))
i i i i i
i i i
i i i i i i
S x u t S x
s t d t d t
p F x t p F x t
(1)
(2)
(3)
(4)
i iS x• Συνάρτηση Προσφοράς
ia,cr ix
iQ
10.
1 2 in-1 n
Μοντελοποίηση της Κυκλοφοριακής Ροής
Το Μοντέλο του Αυτοκινητόδρομου
)()),((min))(()()()1( 111112
11
11 tutxStxFts
L
T
txtx
)())((1)),((min))(()()()1( 1111 tutxFptxStxFts
L
T
txtx iiiiiiiii
ii
ii
για 1,...,2 ni
)())((1)),((min))(()()1( 111 tutxFptxStxF
L
T
txtx nnnnnnnn
nn
nn
1 1 1 1 1 1
( )
( ) 1 ( ) min 1,max 0, ( )min 1,
1 ( ( )) 1 ( ( ))
i i i i i
i i i
i i i i i i
S x u t S x
s t d t d t
p F x t p F x t
(1)
(2)
(3)
(4)
• Ροή Ράμπας Εισόδου σε [veh/h]0iu
0,1ip • με Ποσοστό Εξόδου (Exit Rate)1,...,1 ni
11.
1 2 in-1 n
Μοντελοποίηση της Κυκλοφοριακής Ροής
Το Μοντέλο του Αυτοκινητόδρομου
)()),((min))(()()()1( 111112
11
11 tutxStxFts
L
T
txtx
)())((1)),((min))(()()()1( 1111 tutxFptxStxFts
L
T
txtx iiiiiiiii
ii
ii
για 1,...,2 ni
)())((1)),((min))(()()1( 111 tutxFptxStxF
L
T
txtx nnnnnnnn
nn
nn
1 1 1 1 1 1
( )
( ) 1 ( ) min 1,max 0, ( )min 1,
1 ( ( )) 1 ( ( ))
i i i i i
i i i
i i i i i i
S x u t S x
s t d t d t
p F x t p F x t
(1)
(2)
(3)
(4)
]1,0[is• με Ποσοστό της Επιχειρούμενης Εκροής2,...,i n
]1,0[id• με Παράμετρος Προτεραιότητας Εισροής2,...,i n
Σχήμα Προσαρμοστικού Ελέγχου
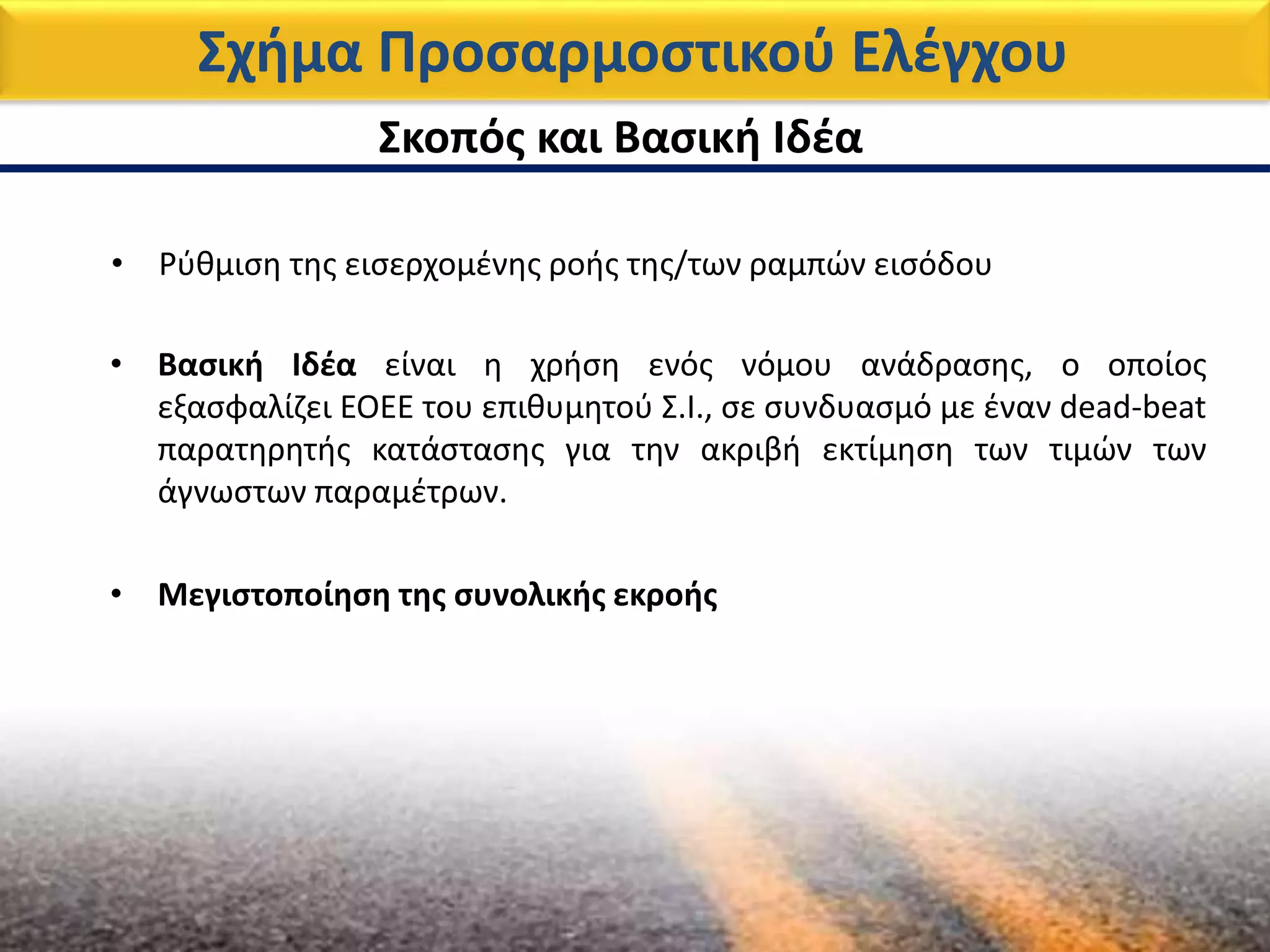
Σκοπόςκαι Βασική Ιδέα
• Βασική Ιδέα είναι η χρήση ενός νόμου ανάδρασης, ο οποίος
εξασφαλίζει EOEE του επιθυμητού Σ.Ι., σε συνδυασμό με έναν dead-beat
παρατηρητής κατάστασης για την ακριβή εκτίμηση των τιμών των
άγνωστων παραμέτρων.
• Ρύθμιση της εισερχομένης ροής της/των ραμπών εισόδου
• Μεγιστοποίηση της συνολικής εκροής
14.
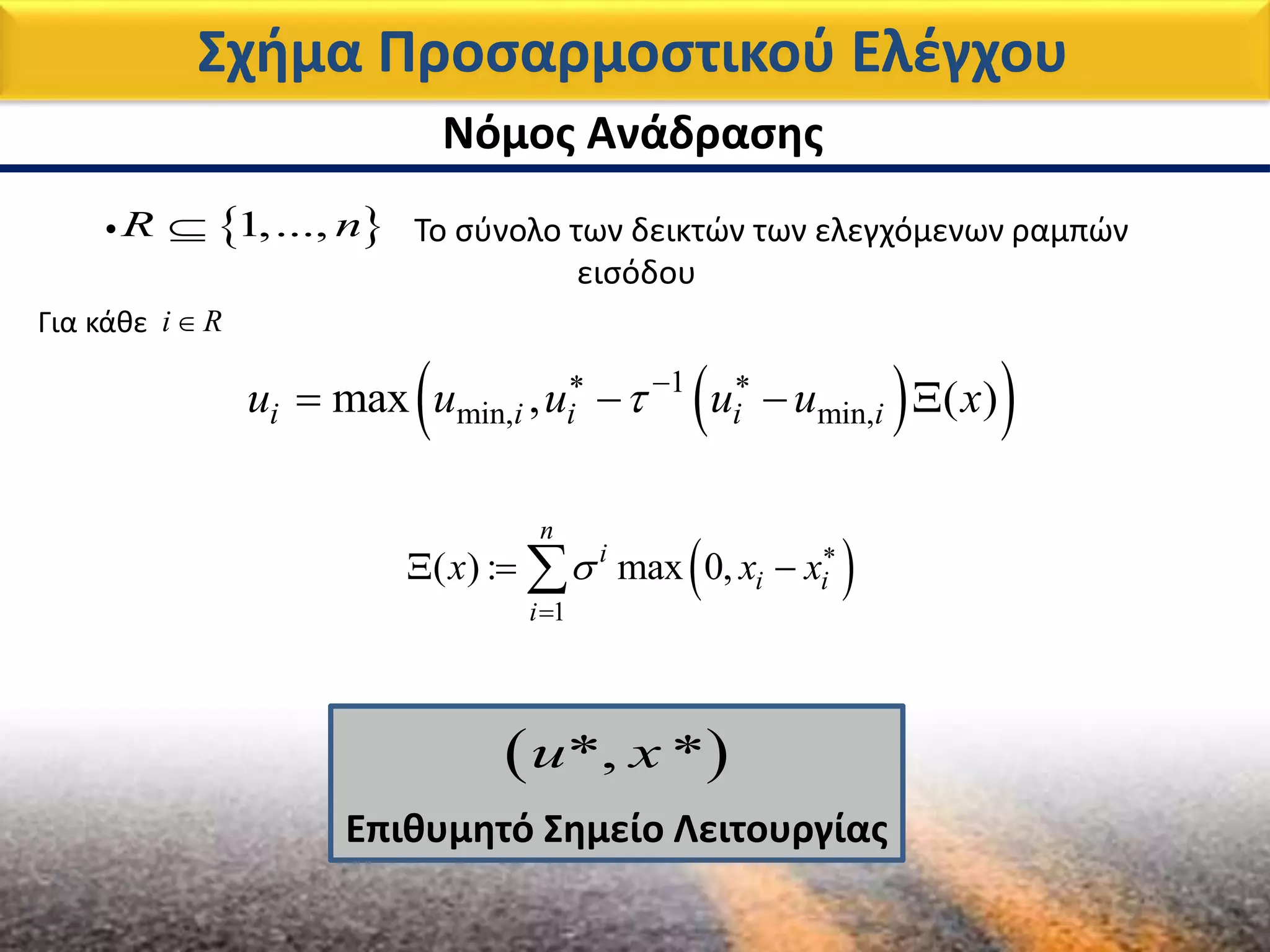
Νόμος Ανάδρασης
Σχήμα ΠροσαρμοστικούΕλέγχου
1
min, min,max , ( )i i i i iu u u u u x
1
( ) : max 0,
n
i
i i
i
x x x
1,...,R n• Το σύνολο των δεικτών των ελεγχόμενων ραμπών
εισόδου
Για κάθε i R
*, *u x
Επιθυμητό Σημείο Λειτουργίας
15.
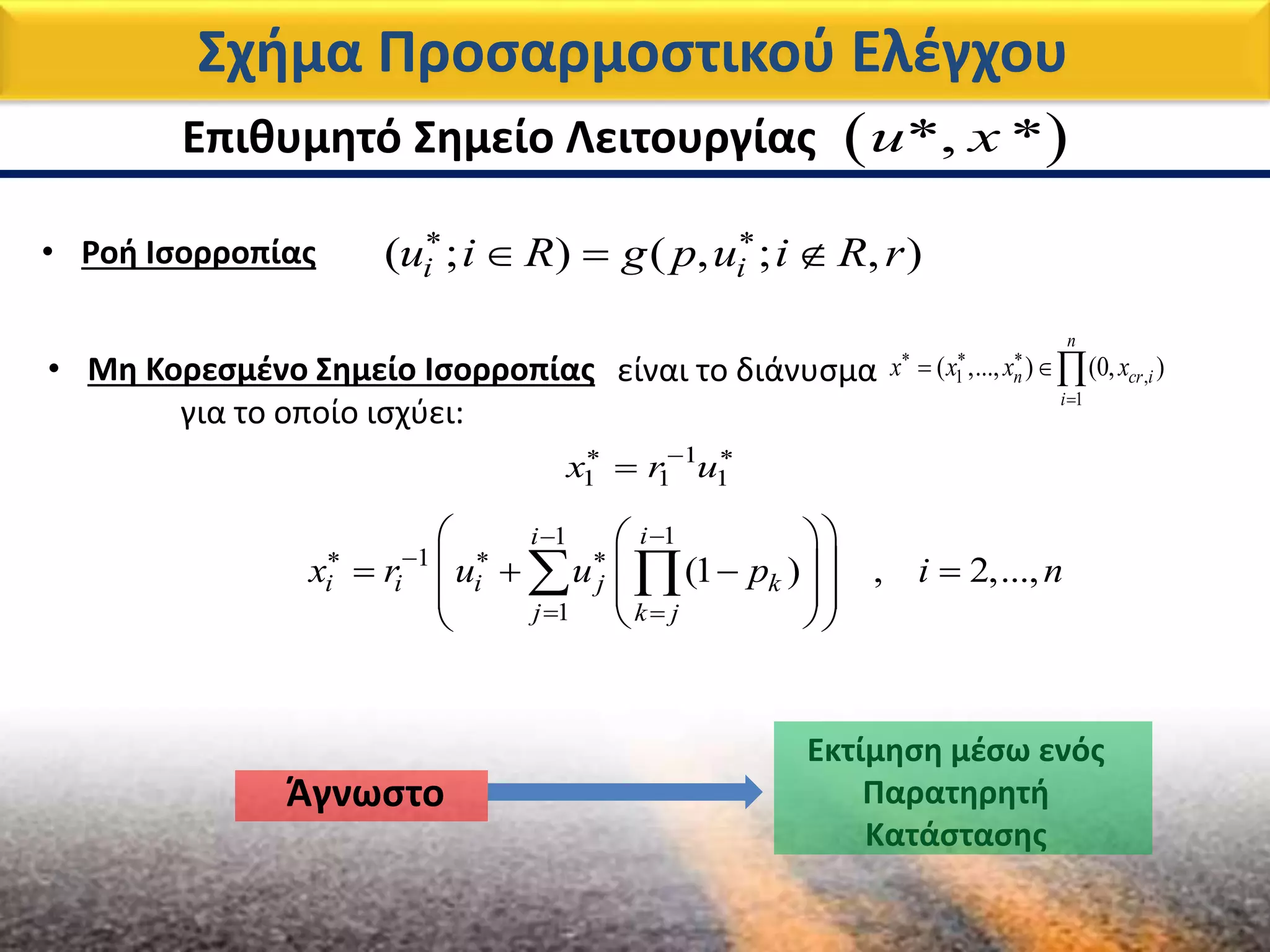
Επιθυμητό Σημείο Λειτουργίας
είναιτο διάνυσμα
για το οποίο ισχύει:
1 ,
1
( ,..., ) (0, )
n
n cr i
i
x x x x
1
1 1 1x r u
11
1
1
(1 ) , 2,...,
ii
i i i j k
j k j
x r u u p i n
Σχήμα Προσαρμοστικού Ελέγχου
( ; ) ( , ; , )i iu i R g p u i R r
• Ροή Ισορροπίας
Άγνωστο
Εκτίμηση μέσω ενός
Παρατηρητή
Κατάστασης
• Μη Κορεσμένο Σημείο Ισορροπίας
*, *u x
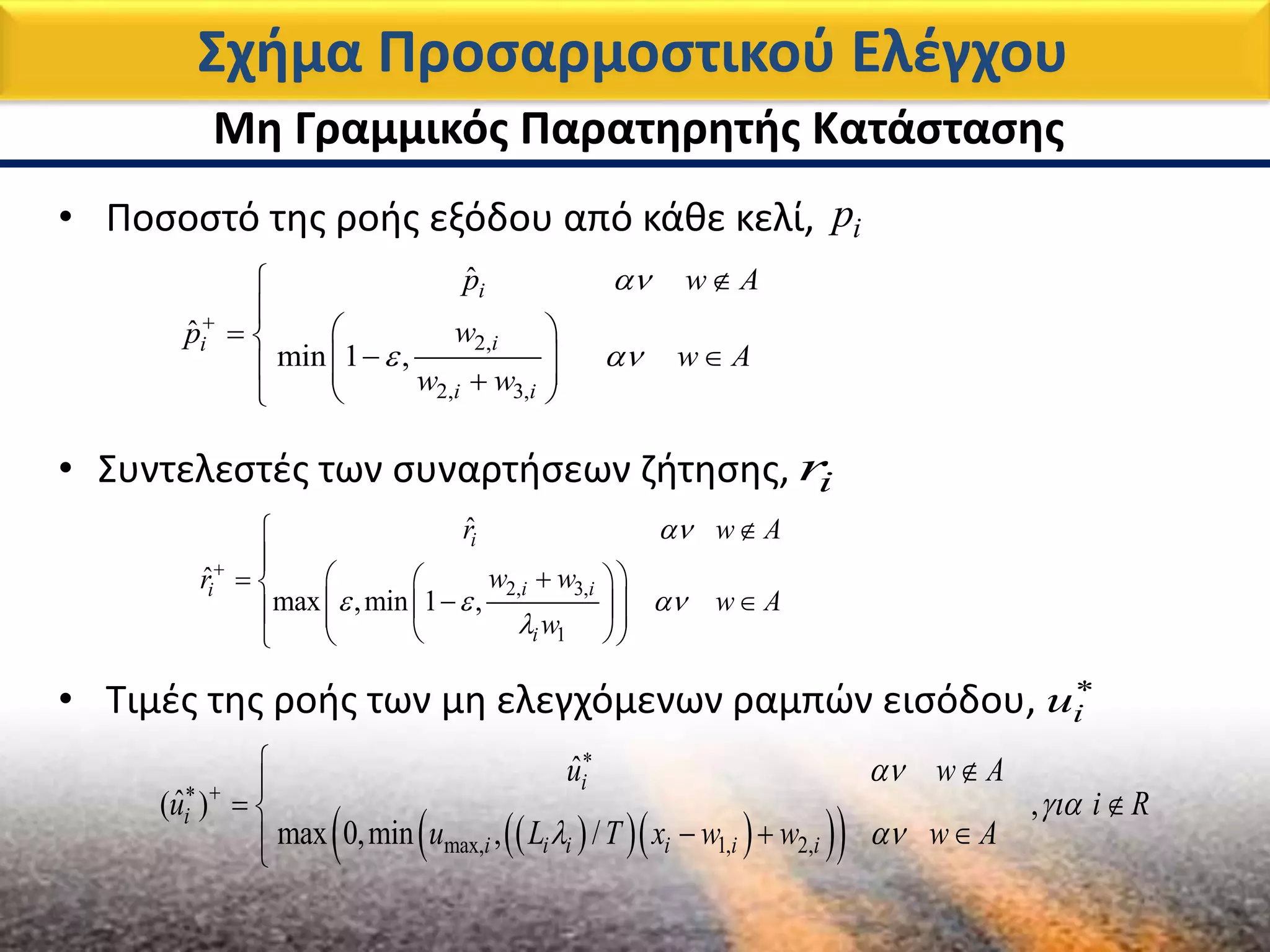
• Συντελεστές τωνσυναρτήσεων ζήτησης, ir
Σχήμα Προσαρμοστικού Ελέγχου
2, 3,
1
ˆ
ˆ
max ,min 1 ,
i
i ii
i
r w A
w wr
w A
w
• Ποσοστό της ροής εξόδου από κάθε κελί, ip
2,
2, 3,
ˆ
ˆ
min 1 ,
i
ii
i i
p w A
wp
w A
w w
Μη Γραμμικός Παρατηρητής Κατάστασης
• Τιμές της ροής των μη ελεγχόμενων ραμπών εισόδου, iu
max, 1, 2,
ˆ
ˆ( ) ,
max 0,min , /
i
i
i i i i i i
u w A
u i R
u L T x w w w A
18.
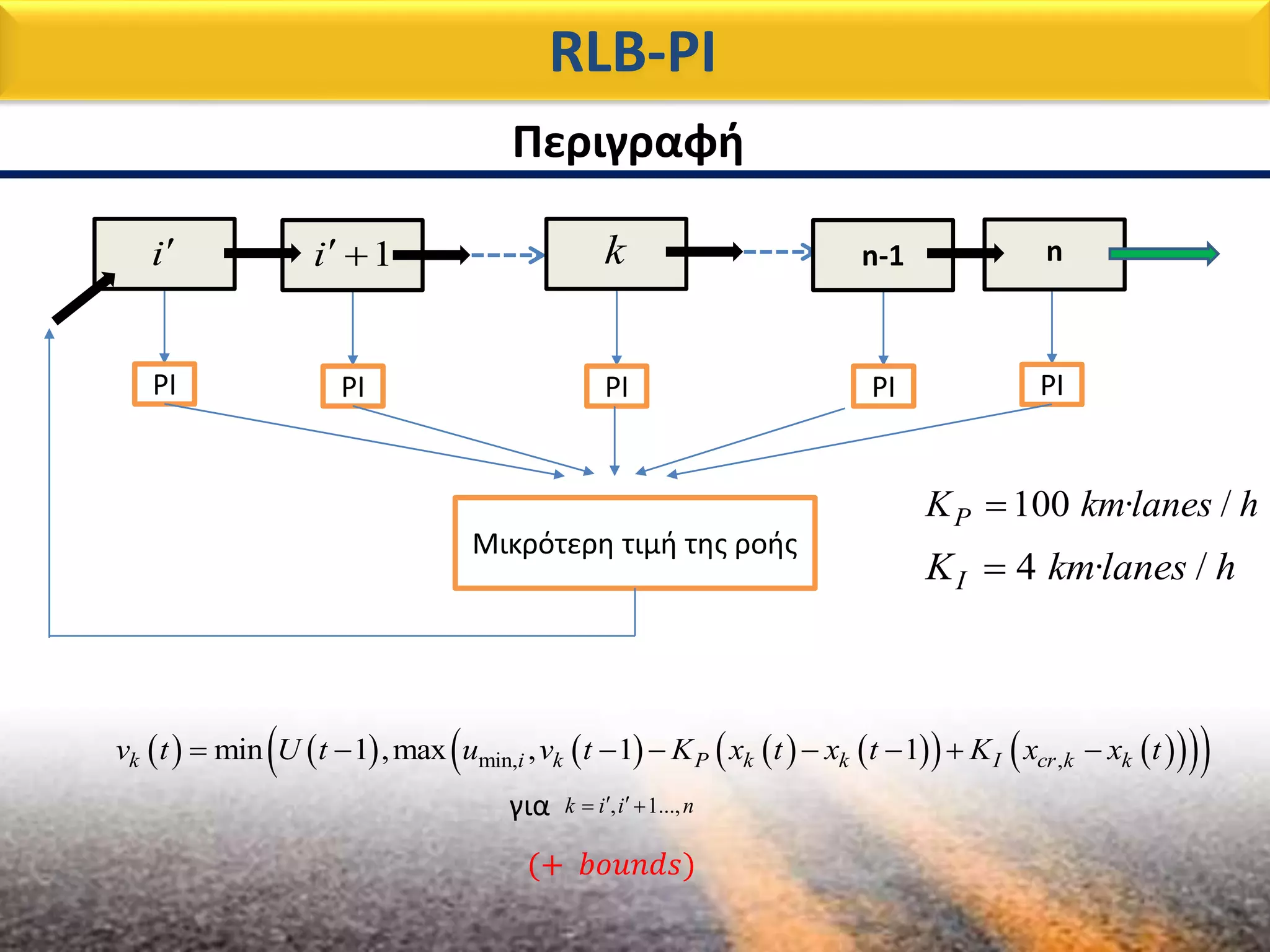
PI PI PIPI PI
RLB-PI
Περιγραφή
Μικρότερη τιμή της ροής
min, ,min 1 ,max , 1 1k i k P k k I cr k kv t U t u v t K x t x t K x x t
(+ 𝑏𝑜𝑢𝑛𝑑𝑠)
, 1...,k i i n για
100 · /PK km lanes h
4 · /I km lanes hK
n-1 ni k1i
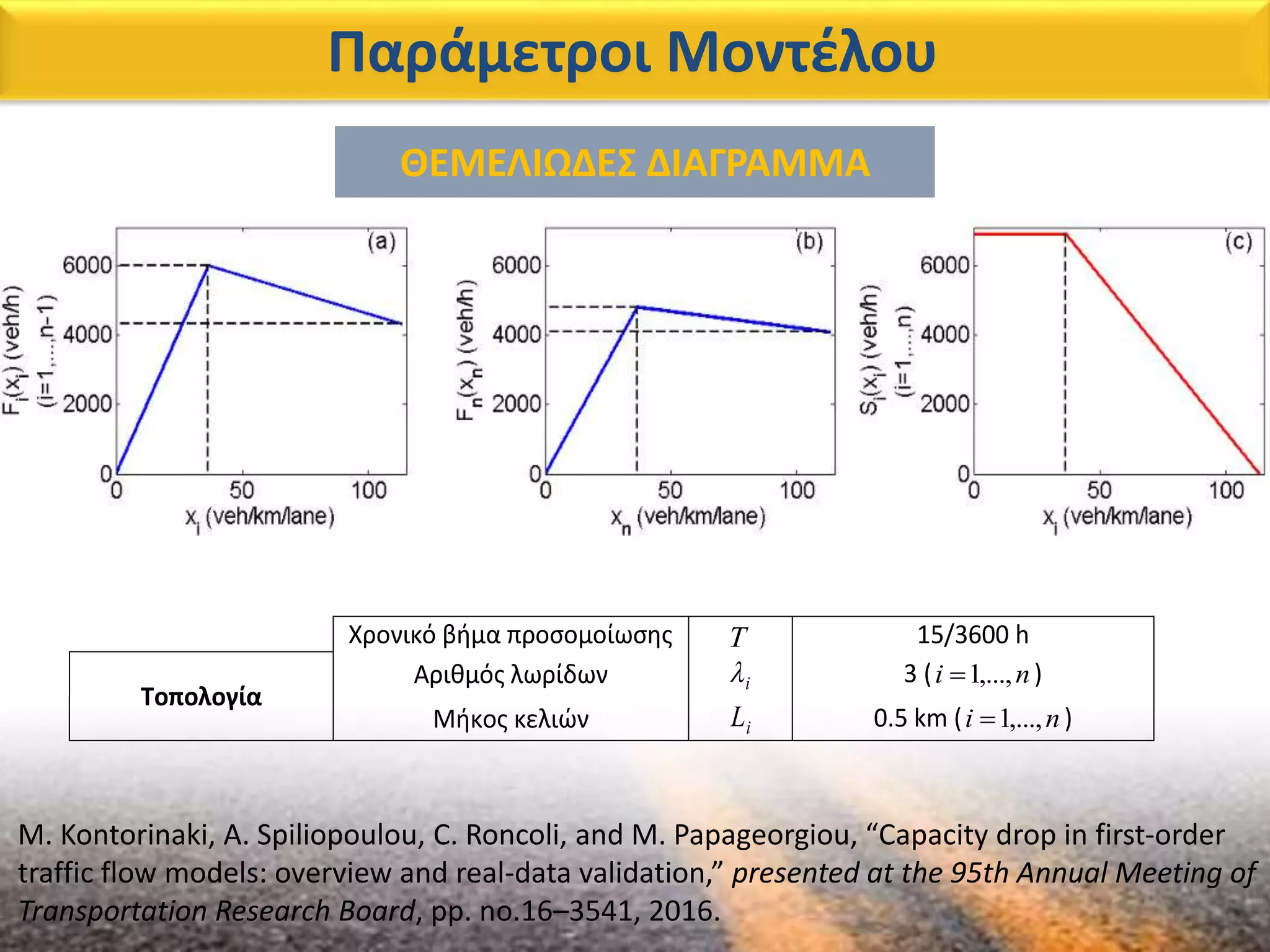
Παράμετροι Μοντέλου
Χρονικό βήμαπροσομοίωσης 15/3600 h
Τοπολογία
Αριθμός λωρίδων 3 ( )
Μήκος κελιών 0.5 km ( )
T
i ni ,...,1
iL ni ,...,1
ΘΕΜΕΛΙΩΔΕΣ ΔΙΑΓΡΑΜΜΑ
M. Kontorinaki, A. Spiliopoulou, C. Roncoli, and M. Papageorgiou, “Capacity drop in first-order
traffic flow models: overview and real-data validation,” presented at the 95th Annual Meeting of
Transportation Research Board, pp. no.16–3541, 2016.
22.
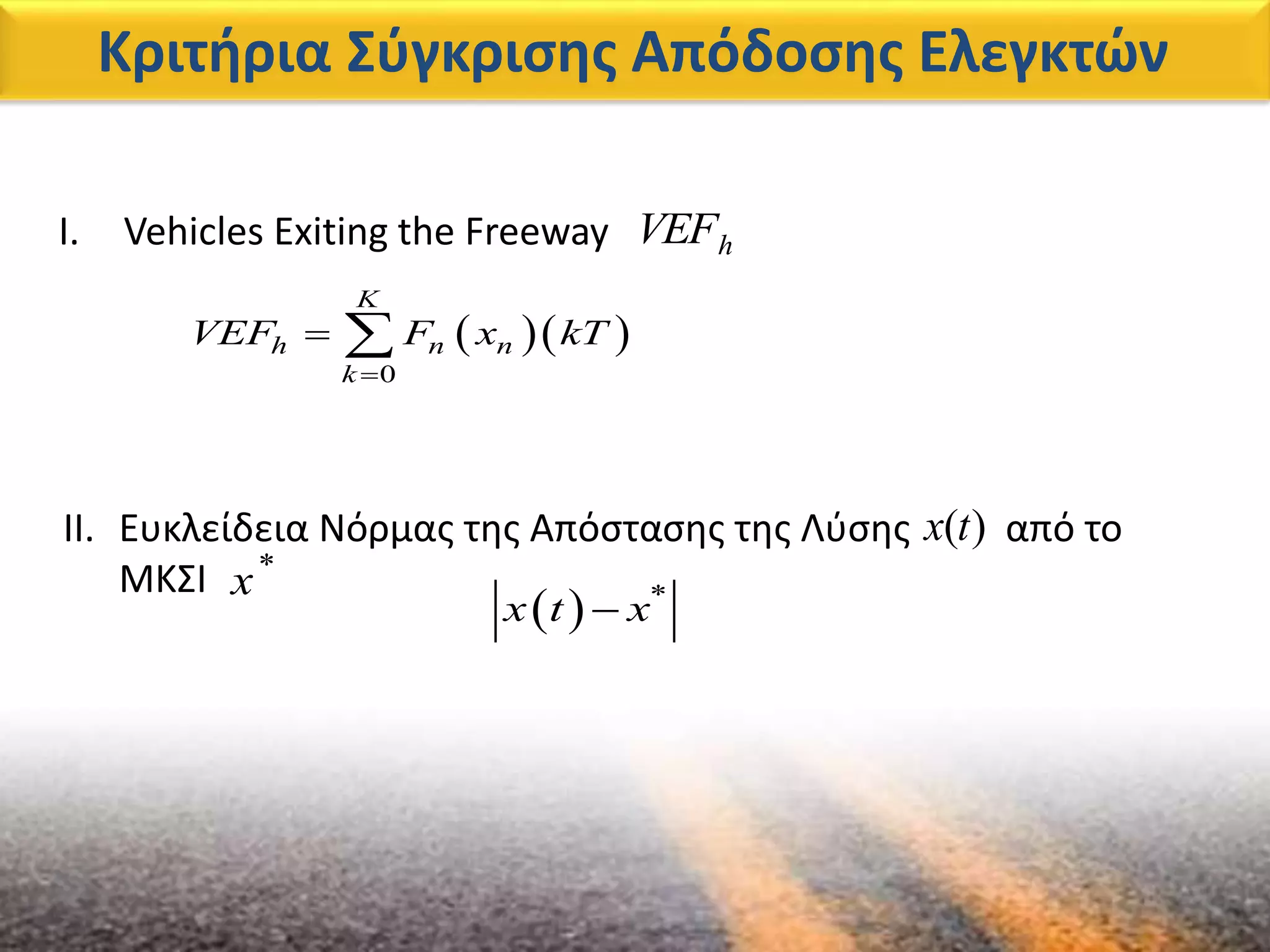
Κριτήρια Σύγκρισης ΑπόδοσηςΕλεγκτών
I. Vehicles Exiting the Freeway hVEF
0
K
h n n
k
VEF F x kT
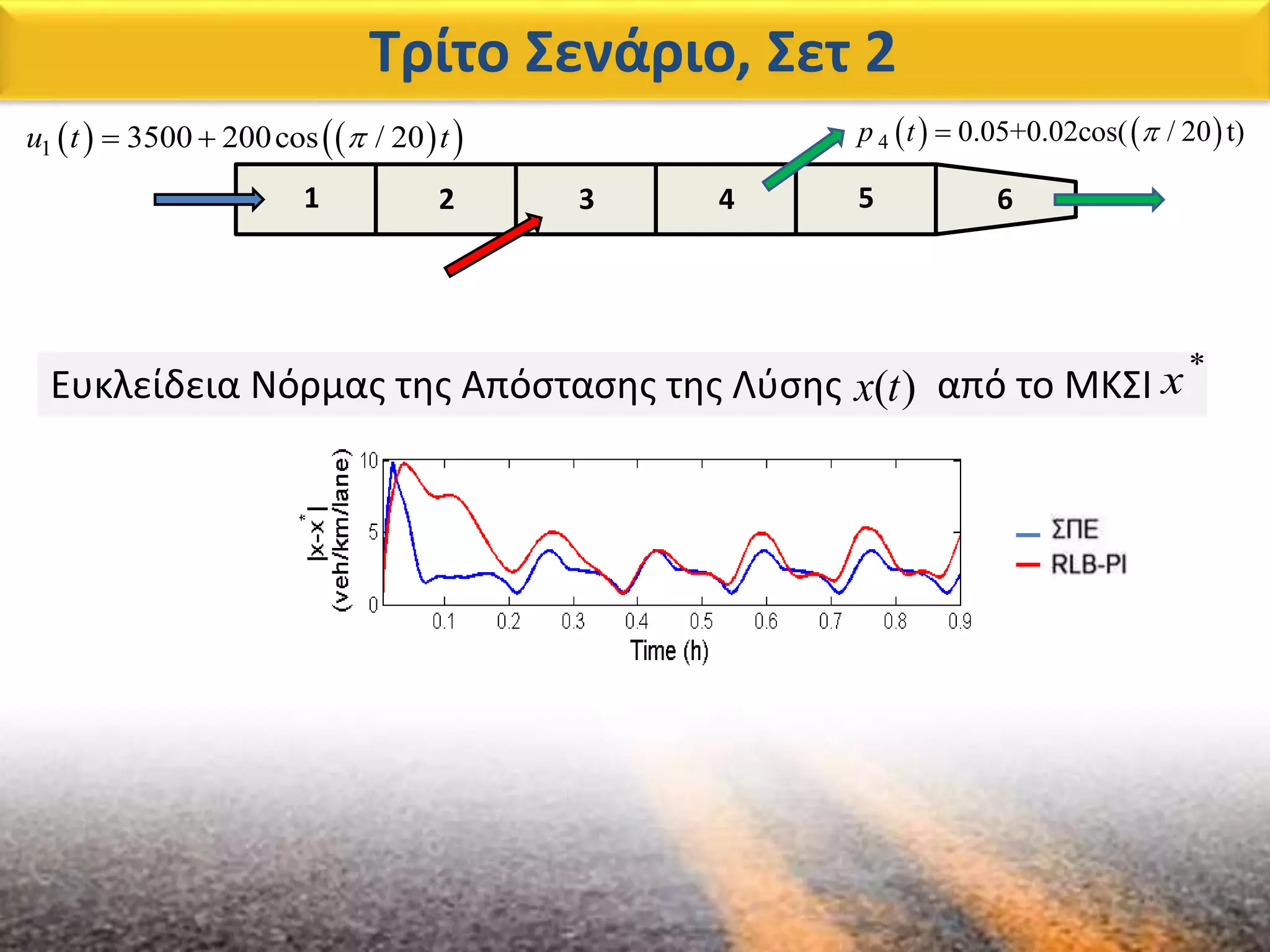
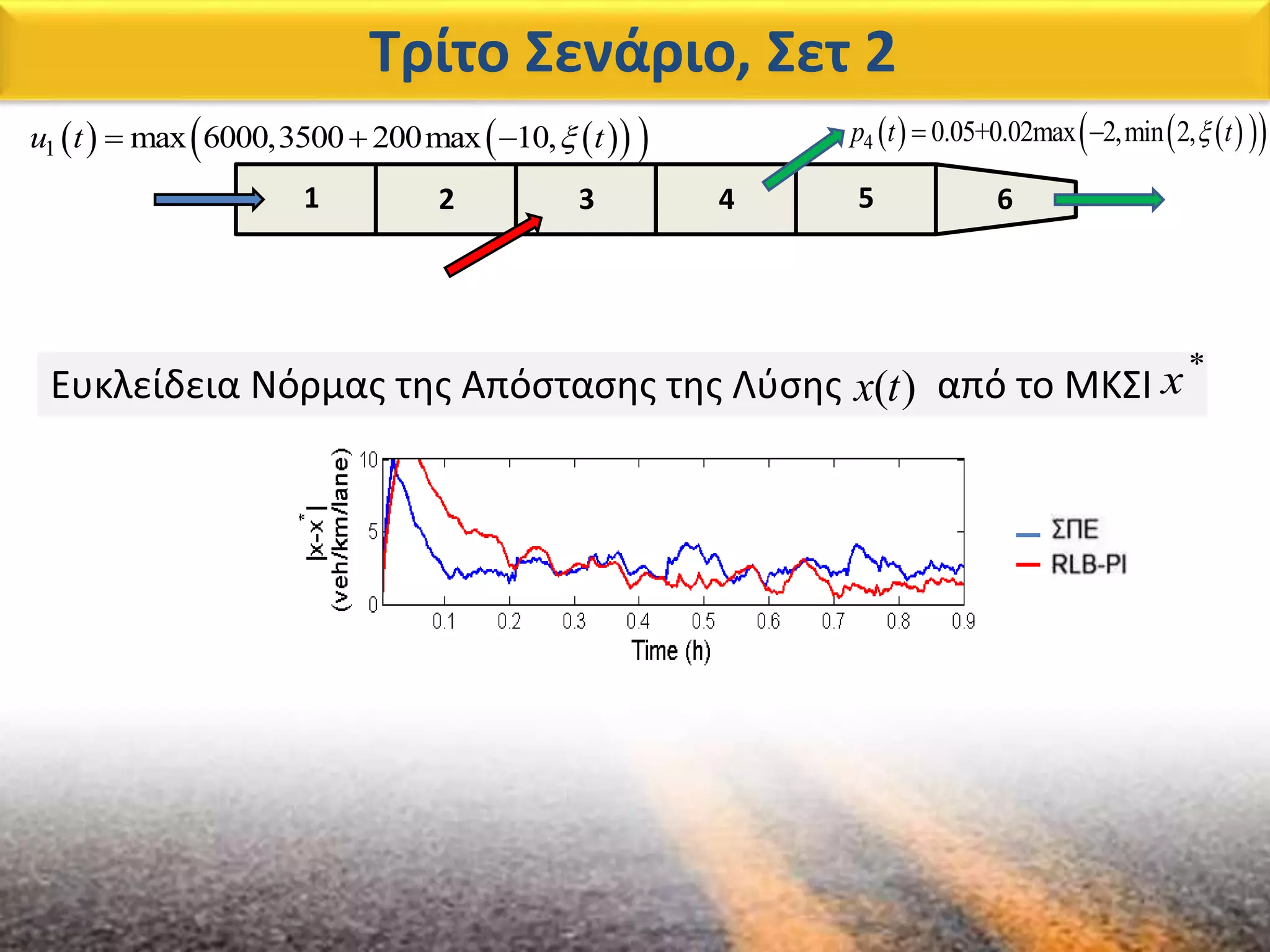
II. Ευκλείδεια Νόρμας της Απόστασης της Λύσης από το
ΜΚΣΙ
)(tx
*
x
*
x t x
Δεύτερο Σενάριο, Σετ1
Ευκλείδεια Νόρμας της Απόστασης της Λύσης από το ΜΚΣΙ)(tx *
x
]40,30,30,30,30[0 x(d)
1VEF +18%1VEF +17%
],,,,[ 543210 aaaaax (a)
Συμπεράσματα
• Οι παράμετροισ, τ του ΣΠΕ είναι εξαρτώμενες
• Tο ΣΠΕ ανταποκρίνεται καλύτερα στις περιπτώσεις όπου η
χρονική μεταβολή των παραμέτρων δίνεται από συναρτήσεις
μικρής συχνότητας σε σχέση με τον RLB-PI για τον οποίο ισχύει το
αντίθετο.
• Για σταθερές παραμέτρους, το ΣΠΕ οδηγεί σε καλύτερη απόκριση
συγκριτικά με τον RLB-PI.
• Το ΣΠΕ αποτελεί ολοκληρωμένο σχήμα για εφαρμογή
συντονισμένου έλεγχου ραμπών εισόδου
Editor's Notes
#4 Η αύξηση των οχημάτων τις τελευταίες δεκαετίες οδήγησε στην ανάπτυξη του φαινομένου της κυκλοφοριακής συμφόρησης.
Η κυκλοφοριακή συμφόρηση είναι πλέον ένα μείζον πρόβλημα τόσο σε αστικούς όσο και περιαστικούς αυτοκινητοδρόμους.
Η επέκταση των υφιστάμενων υποδομών δεν είναι εφικτή για οικονομικούς και περιβαλλοντικούς λόγους.
--------------------------------------------------------------------------------------------------------------------------------------------
Οι ερευνητές αναζητούν μεθόδους που αποσκοπούν στην διαχείριση και βέλτιστη λειτουργία των υφιστάμενων υποδομών.
Οι μεταφορές αποτελούσαν ανέκαθεν, ένα νευραλγικό τομέα του πολιτισμού και της οικονομίας των κοινωνιών. Καθώς οι
ανάγκες κινητικότητας αυξάνουν δυναμικά, είναι πλέον απαραίτητο η διαχείριση του – συνεχώς αυξανόμενου - όγκου των μεταφορών να γίνεται με
τρόπο βιώσιμο, περιβαλλοντικά και κοινωνικά δίκαιο.
#16 Ο νόμος ανάδρασης καθορίζει την τιμή της ροής από την ράμπα εισόδου και επιτυγχάνει την εύρωστη ολική εκθετική σταθεροποίηση του ΜΚΣΙ του συστήματος
#17 Τις περισσότερες φορές είναι αδύνατο να γνωρίζουμε τις παραμέτρους χι* και uι* που αναπαριστούν το βέλτιστο σημείο λειτουργίας του αυτοκινητοδρόμου. Για αυτό το λόγο εφαρμόστηκε μεθοδολογία που επιτρέπει την εκτίμηση αυτού του σημείου λειτουργίας.
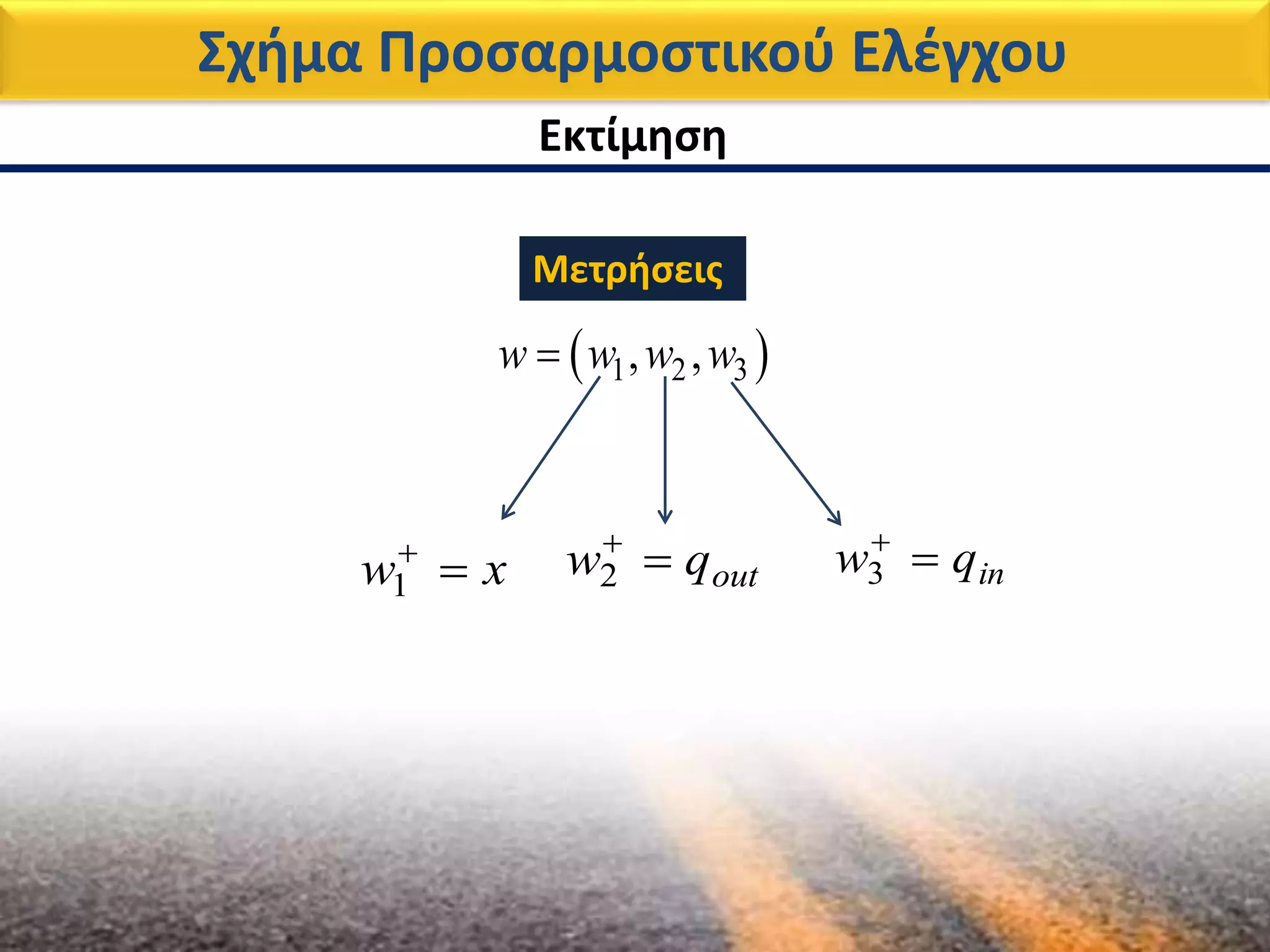
#18 Η εκτίμηση των μεταβλητών που αναφέρθηκαν παραπάνω πραγματοποιείται με τη βοήθεια μετρήσεων πυκνότητας και ροής. Αυτό αποτελεί μια ρεαλιστική απαίτηση εφόσον στους περισσότερους αυτοκινητοδρόμους που εφαρμόζεται έλεγχος κυκλοφορίας υπάρχουν φωρατές που επιτελούν αυτόν τον σκοπό. Βοηθουν στην εκτίμηση των μεγεθών
#20 Η εκτίμηση των μεταβλητών που αναφέρθηκαν παραπάνω πραγματοποιείται με τη βοήθεια μετρήσεων πυκνότητας και ροής. Αυτό αποτελεί μια ρεαλιστική απαίτηση εφόσον στους περισσότερους αυτοκινητοδρόμους που εφαρμόζεται έλεγχος κυκλοφορίας υπάρχουν φωρατές που επιτελούν αυτόν τον σκοπό. Βοηθουν στην εκτίμηση των μεγεθών
#21 Σταθεροποιήση του συστήματος σε ένα ΜΚΣΙ το οποίο μεγιστοποιεί την συνολική εκροή από τον αυτοκινητόδρομο.
ι’ το κελί από το οποίο θέλουμε να μεγιστοποιήσουμε τη ροή εξόδου και το οποίο πράγματι βρίσκεται κατάντη της τελευταίας ράμπας που επιθυμούμε να ελέγξουμε
#28 η διαδικασία αυτού του ελέγχου αφορά την περίπτωση όπου ελέγχεται η ροή από το κυρίως ρεύμα του αυτοκινητοδρόμου (mainline metering) μέσω ενεργοποιητών ροής (flow actuators) όπως τα μεταβλητά σήματα μηνημάτων (variable message signs).
#30 Στο πρώτο σετ οι προσομοιώσεις διεξάγονται, ώστε να διερευνηθεί η ευαισθησία του ΣΠΕ σε σχέση με τις παραμέτρους του με βάση το
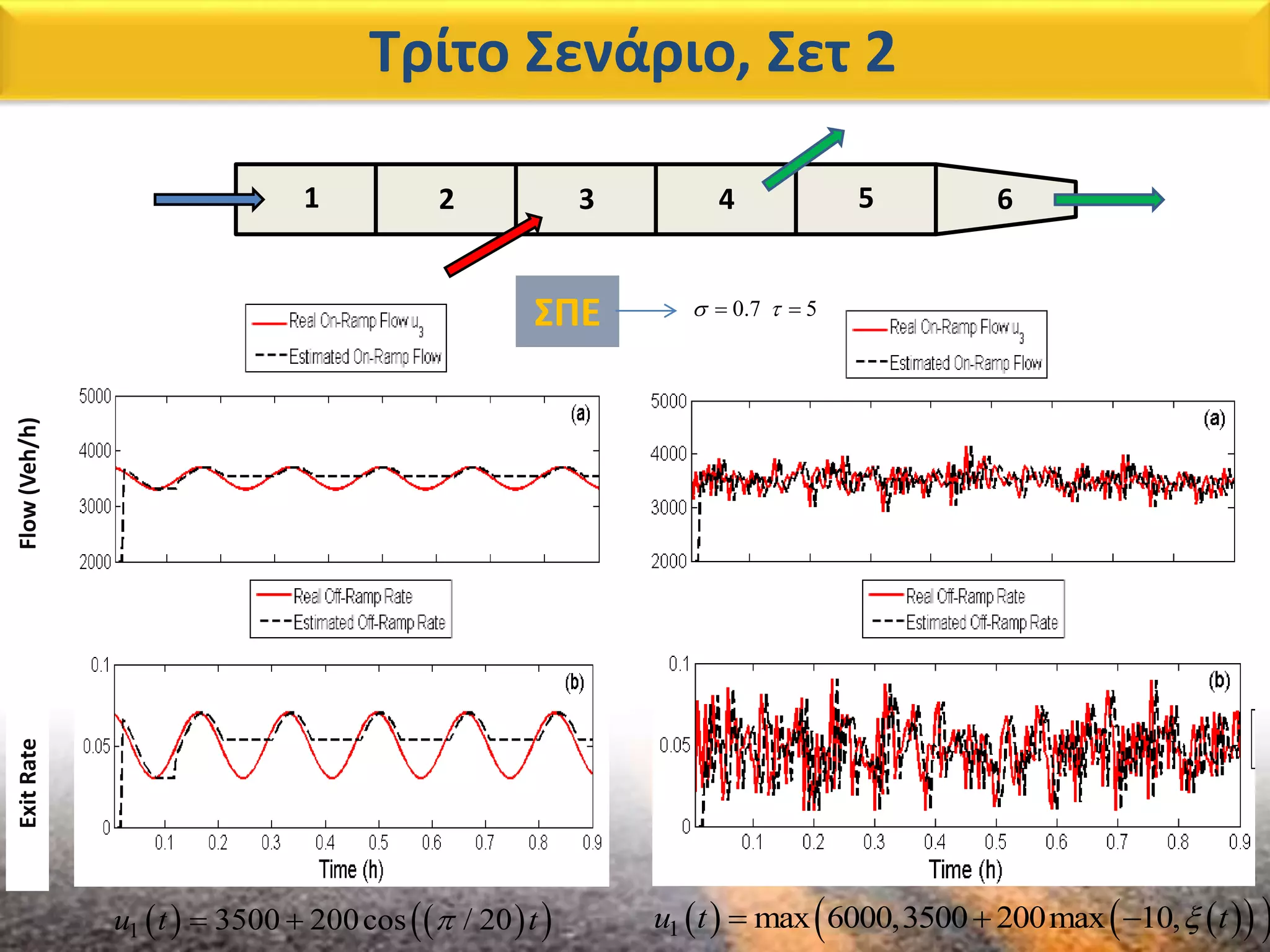
#37 Σε κάθε περίπτωση, η απόκριση της πυκνότητας φαίνεται να μην επηρεάζεται ή να επηρεάζεται ελάχιστα από τις τιμές που παίρνουν τα , όπως φαίνεται στο Σχήμα 5-17 και 5-18 που παρουσιάζουν τη χρονική απόκριση της πυκνότητας για τις δύο διαφορετικές συναρτήσεις των και για το ΣΠΕ και τον RLB-PI αντίστοιχα όπου και φαίνεται πως και οι δύο ελεγκτές απέριψαν την διαταραχή. Η διαταραχή επηρεάζει τον έλεγχο για μικρό χρονικό διάστημα, χωρίς να είναι ικανή να εμποδίσει συνολικά την διαδικασία του ελέγχου.
![1 2 i n-1 n
Μοντελοποίηση της Κυκλοφοριακής Ροής
Το Μοντέλο του Αυτοκινητόδρομου
)()),((min))(()()()1( 111112
11
11 tutxStxFts
L
T
txtx
)())((1)),((min))(()()()1( 1111 tutxFptxStxFts
L
T
txtx iiiiiiiii
ii
ii
για 1,...,2 ni
)())((1)),((min))(()()1( 111 tutxFptxStxF
L
T
txtx nnnnnnnn
nn
nn
1 1 1 1 1 1
( )
( ) 1 ( ) min 1,max 0, ( )min 1,
1 ( ( )) 1 ( ( ))
i i i i i
i i i
i i i i i i
S x u t S x
s t d t d t
p F x t p F x t
(1)
(2)
(3)
(4)
• Πυκνότητα , σε veh/km/lane όπου],0[)( ii atx t kT
• Μέγιστη Πυκνότητα0ia](https://image.slidesharecdn.com/5ee31f10-34f4-4cf1-ab80-bff668cf4d16-160417173722/75/Presentation__-7-2048.jpg)
![1 2 i n-1 n
Μοντελοποίηση της Κυκλοφοριακής Ροής
Το Μοντέλο του Αυτοκινητόδρομου
)()),((min))(()()()1( 111112
11
11 tutxStxFts
L
T
txtx
)())((1)),((min))(()()()1( 1111 tutxFptxStxFts
L
T
txtx iiiiiiiii
ii
ii
για 1,...,2 ni
)())((1)),((min))(()()1( 111 tutxFptxStxF
L
T
txtx nnnnnnnn
nn
nn
1 1 1 1 1 1
( )
( ) 1 ( ) min 1,max 0, ( )min 1,
1 ( ( )) 1 ( ( ))
i i i i i
i i i
i i i i i i
S x u t S x
s t d t d t
p F x t p F x t
(1)
(2)
(3)
(4)
• Ροή Ράμπας Εισόδου σε [veh/h]0iu
0,1ip • με Ποσοστό Εξόδου (Exit Rate)1,...,1 ni](https://image.slidesharecdn.com/5ee31f10-34f4-4cf1-ab80-bff668cf4d16-160417173722/75/Presentation__-10-2048.jpg)
![1 2 i n-1 n
Μοντελοποίηση της Κυκλοφοριακής Ροής
Το Μοντέλο του Αυτοκινητόδρομου
)()),((min))(()()()1( 111112
11
11 tutxStxFts
L
T
txtx
)())((1)),((min))(()()()1( 1111 tutxFptxStxFts
L
T
txtx iiiiiiiii
ii
ii
για 1,...,2 ni
)())((1)),((min))(()()1( 111 tutxFptxStxF
L
T
txtx nnnnnnnn
nn
nn
1 1 1 1 1 1
( )
( ) 1 ( ) min 1,max 0, ( )min 1,
1 ( ( )) 1 ( ( ))
i i i i i
i i i
i i i i i i
S x u t S x
s t d t d t
p F x t p F x t
(1)
(2)
(3)
(4)
]1,0[is• με Ποσοστό της Επιχειρούμενης Εκροής2,...,i n
]1,0[id• με Παράμετρος Προτεραιότητας Εισροής2,...,i n](https://image.slidesharecdn.com/5ee31f10-34f4-4cf1-ab80-bff668cf4d16-160417173722/75/Presentation__-11-2048.jpg)
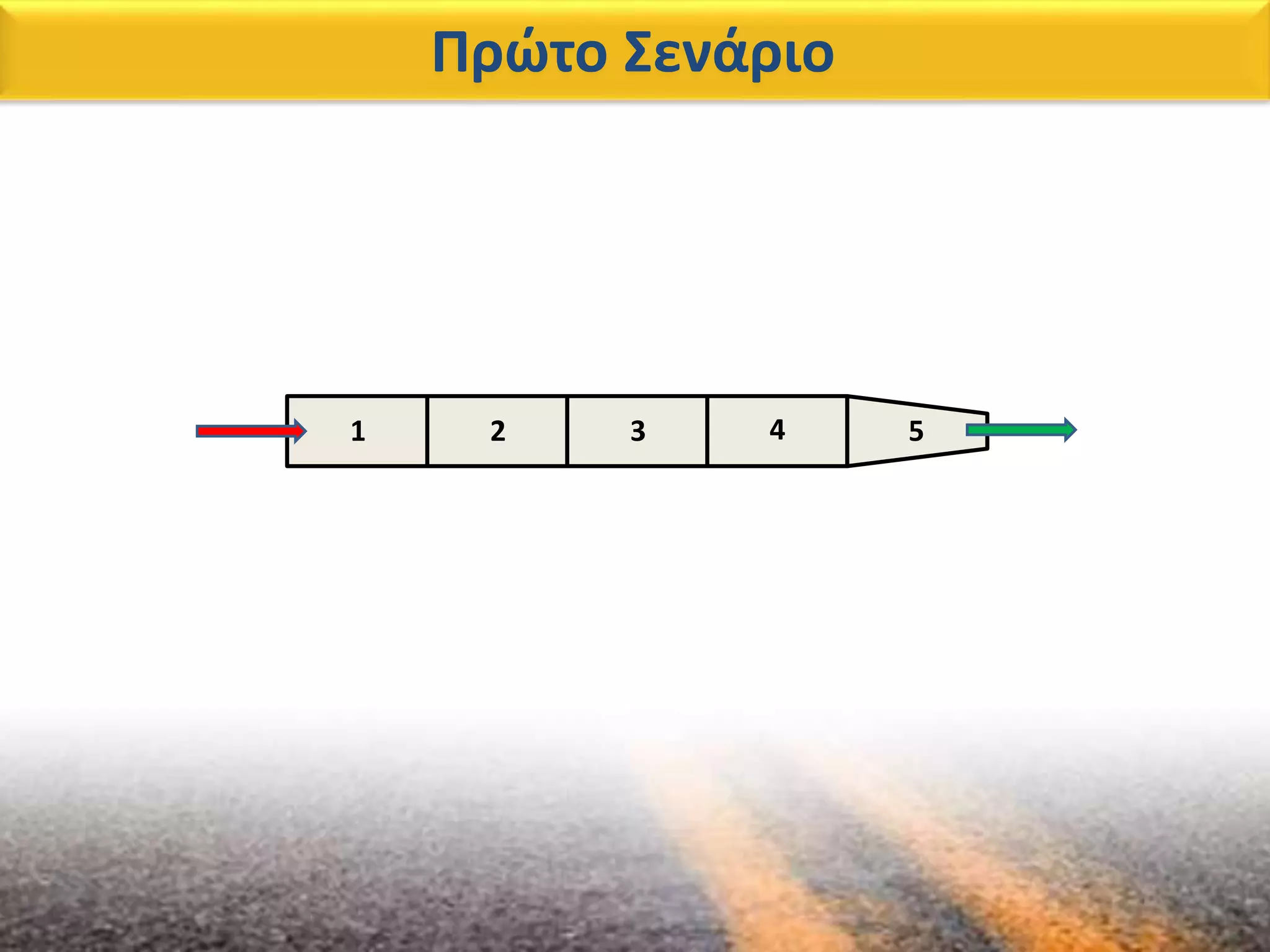
![Πρώτο σενάριο (Open Loop)
• Αρχική Πυκνότητα Οχημάτων
• ΜΚΣΙ:
],,,,[ 543210 aaaaax
* * * * * *
1 2 3 4 5[ , , , , ] [29.33,29.33,29.33,29.33,36.66]x x x x x x
1 4800u 1 2 3 4 5](https://image.slidesharecdn.com/5ee31f10-34f4-4cf1-ab80-bff668cf4d16-160417173722/75/Presentation__-24-2048.jpg)
![Πρώτο Σενάριο, Σετ 1
0.4 0.5 0.6 0.7 0.8 0.9
2 1.120.279 1.106.554 1.095.040 1.091.327 1.089.136 1.088972
5 1.122.635 1.122.980 1.107.574 1.096.178 1.092.195 1.089.730
10 — 1.126.171 1.121.159 1.106.794 1.096.452 1.092.500
15 — — 1.129.504 1.114.329 1.102.412 1.094.963
25 — — 1.107.129 1.127.347 1.111.847 1.101.074
35 — — — 1.129.675 1.120.948 1.107.219
45 — — — — 1.127.844 1.112.543
75 — — — — — 1.127.766
στ
Διερεύνηση αναφορικά με τις σ, τ
ΣΠΕ
1VEF
],,,,[ 543210 aaaaax ](https://image.slidesharecdn.com/5ee31f10-34f4-4cf1-ab80-bff668cf4d16-160417173722/75/Presentation__-25-2048.jpg)
![RLB-PI
1 2 3 4 5
],,,,[ 543210 aaaaax (a) ]40,30,30,30,30[0 x(d)
Πρώτο Σενάριο, Σετ 2
ΣΠΕ 0.7 10 ](https://image.slidesharecdn.com/5ee31f10-34f4-4cf1-ab80-bff668cf4d16-160417173722/75/Presentation__-26-2048.jpg)
![Πρώτο Σενάριο, Σετ 2
ΣΠΕ RLB-PI
],,,,[ 543210 aaaaax (a) ]40,30,30,30,30[0 x(d)
1VEF +23% +21%1VEF
0.7 10 ](https://image.slidesharecdn.com/5ee31f10-34f4-4cf1-ab80-bff668cf4d16-160417173722/75/Presentation__-27-2048.jpg)

![Δεύτερο Σενάριο, Σετ 1
1 2 3 4 5
ΣΠΕ
3 800u
Flow(Veh/h)
],,,,[ 543210 aaaaax (a) ]40,30,30,30,30[0 x(d)
0.7 10 ](https://image.slidesharecdn.com/5ee31f10-34f4-4cf1-ab80-bff668cf4d16-160417173722/75/Presentation__-29-2048.jpg)
![Δεύτερο Σενάριο, Σετ 1
Ευκλείδεια Νόρμας της Απόστασης της Λύσης από το ΜΚΣΙ)(tx *
x
]40,30,30,30,30[0 x(d)
1VEF +18%1VEF +17%
],,,,[ 543210 aaaaax (a)](https://image.slidesharecdn.com/5ee31f10-34f4-4cf1-ab80-bff668cf4d16-160417173722/75/Presentation__-30-2048.jpg)
![Δεύτερο Σενάριο, Σετ 2
1 2 3 4 5
ΣΠΕ RLB-PI0.7 10
3 max 2000, 800 200max 10,u t t
*
0 [24.44,24.44,29.33,29.33,36.66]x x
3 800 200cos / 20u t t ](https://image.slidesharecdn.com/5ee31f10-34f4-4cf1-ab80-bff668cf4d16-160417173722/75/Presentation__-31-2048.jpg)
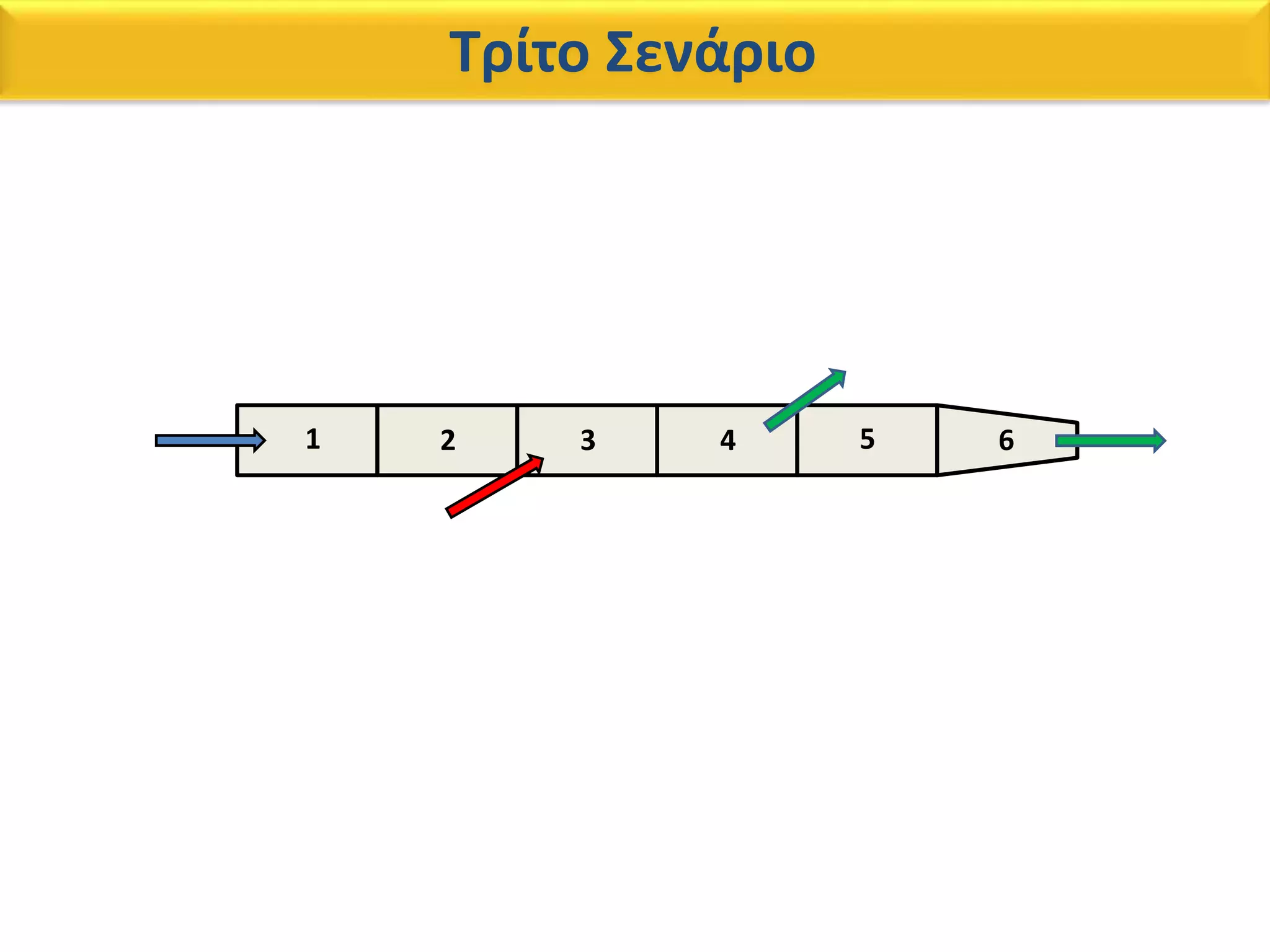
![Τρίτο Σενάριο, Σετ 1
4 0.05p
1 3500u
2 3 4 5 61
],,,,[ 543210 aaaaax (a) (d) 0 [30,30,30,30,35]x
ΣΠΕ 0.7 5 RLB-PI](https://image.slidesharecdn.com/5ee31f10-34f4-4cf1-ab80-bff668cf4d16-160417173722/75/Presentation__-33-2048.jpg)
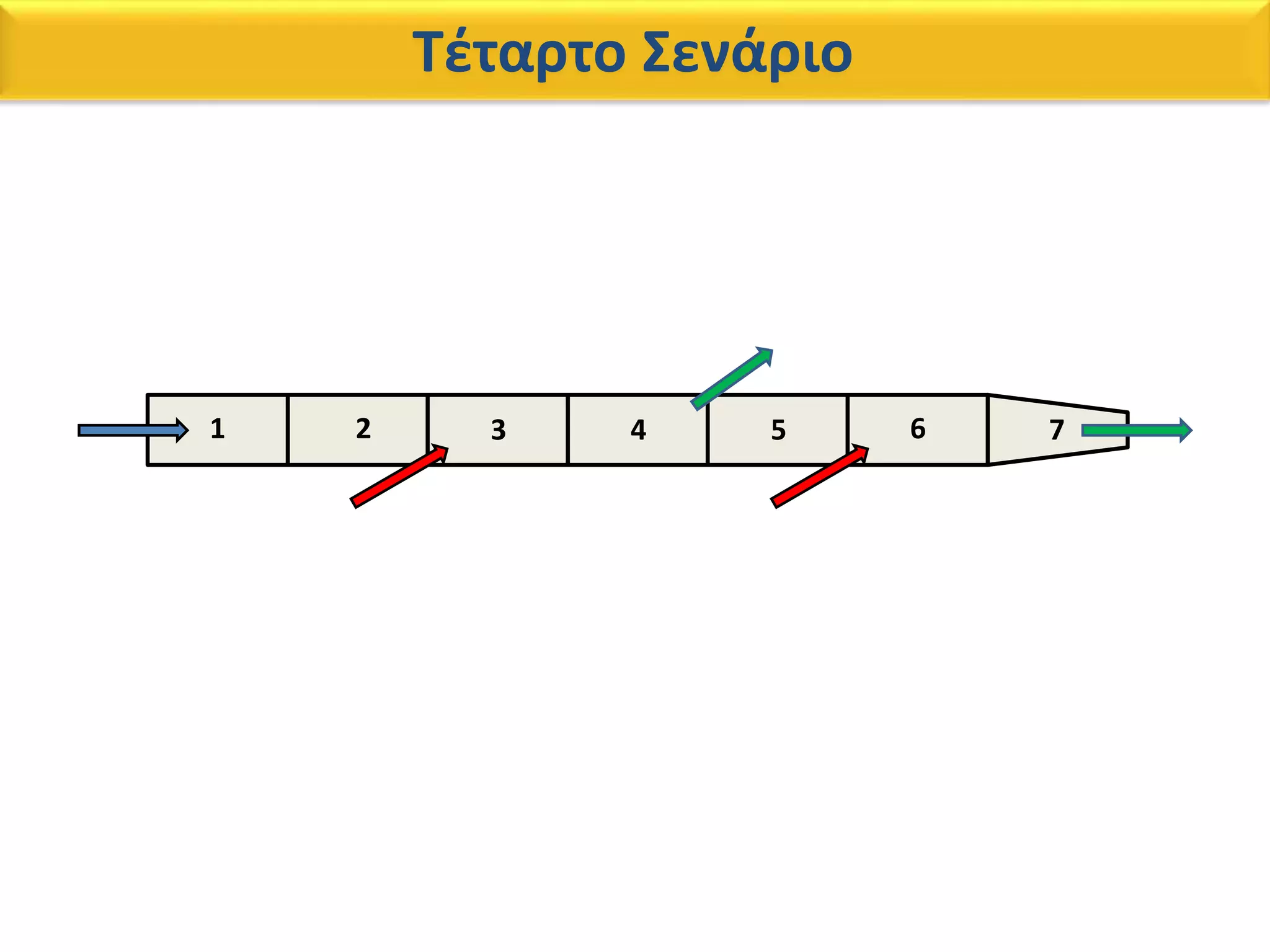
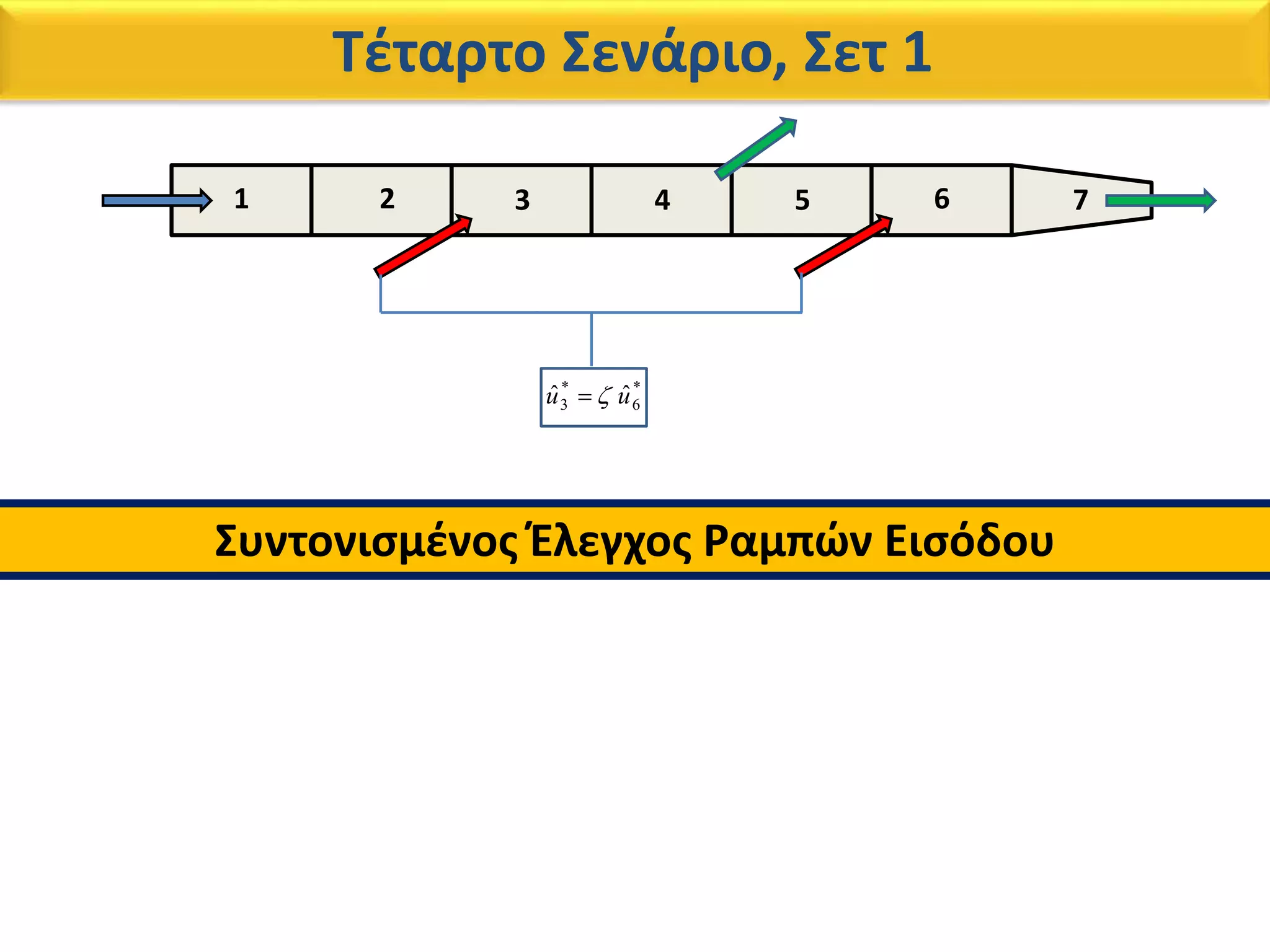
![Τέταρτο Σενάριο, Σετ 1
2.00 t 0.2 0.41t 0.41 0.62t 0.62 0.83t 0.83 1t
1
3
2
1
2
3 1
3 4 5 6 721
1
3
* * * * * * * *
1 2 3 4 5 6 7[ , , , , , , ] [ 21.38, 21.38, 23.67, 23.67, 22.48, 29.33, 36.66]x x x x x x x x
2 * * * * * * * *
1 2 3 4 5 6 7[ , , , , , , ] [ 21.38, 21.38, 27.60, 27.60, 26.22, 29.33, 36.66]x x x x x x x x
1
2
* * * * * * * *
1 2 3 4 5 6 7[ , , , , , , ] [ 21.38, 21.38, 24.44, 24.44, 23.22, 29.33, 36.66]x x x x x x x x
3 * * * * * * * *
1 2 3 4 5 6 7[ , , , , , , ] [ 21.38, 21.38, 28.41, 28.41, 26.99, 29.33, 36.66]x x x x x x x x
1 * * * * * * * *
1 2 3 4 5 6 7[ , , , , , , ] [ 21.38, 21.38, 26.01, 26.01, 24.70, 29.33, 36.66]x x x x x x x x ](https://image.slidesharecdn.com/5ee31f10-34f4-4cf1-ab80-bff668cf4d16-160417173722/75/Presentation__-39-2048.jpg)
![3 4 5 6 721
Τέταρτο Σενάριο, Σετ 1
1 3500u
4 0.05p
0 [20,20,25,25,25,30,40]x ΣΠΕ 0.7 2 ](https://image.slidesharecdn.com/5ee31f10-34f4-4cf1-ab80-bff668cf4d16-160417173722/75/Presentation__-40-2048.jpg)
![3 4 5 6 721
Τέταρτο Σενάριο, Σετ 1
0 [20,20,25,25,25,30,40]x ΣΠΕ 0.7 5
1 3500 200cos / 20u t t 4 0.05+0.02cos( / 20 t)p t ](https://image.slidesharecdn.com/5ee31f10-34f4-4cf1-ab80-bff668cf4d16-160417173722/75/Presentation__-41-2048.jpg)
![Τέταρτο Σενάριο, Σετ 1
3 4 5 6 721
1 max 6000,3500 200max 10,u t t 4 0.05+0.02max 2,min 2,p t t
0 [20,20,25,25,25,30,40]x ΣΠΕ 0.7 10 ](https://image.slidesharecdn.com/5ee31f10-34f4-4cf1-ab80-bff668cf4d16-160417173722/75/Presentation__-42-2048.jpg)




![MMR[1]](https://cdn.slidesharecdn.com/ss_thumbnails/62f5ea78-3a70-4a78-9b6a-2b50a109e4b9-151126061222-lva1-app6891-thumbnail.jpg?width=640&height=640&fit=bounds)