16/09/1230/05 33
Εξοπλισμός
11εργαστηριακοί πάγκοι εργασίας, πλήρως συνδεμένοι με συγχρόνους
Η/Υ, με εξοπλισμό (process control) της Leybold Didactic Gmbh
11 Μοντέρνοι σταθμοί, Cassy Interfaces, δημιουργίας – καταγραφής
αναλογικών – ψηφιακών δεδομένων σε κάθε πάγκο εργασίας,
τελευταίας τεχνολογίας (2007 -) της Leybold Didactic Gmbh με
σύνδεση usb με Η/Υ
Χρήση, σε όλους τους πάγκους εργασίας, μοντέρνων λογισμικών
(2010-) CassyLab2, για πλήρη αυτοματοποιημένη καταγραφή –
επεξεργασία –εποπτική παρουσίαση πειραματικών αποτελεσμάτων
3
4.
16/09/1230/05 44
ΧΑΡΑΚΤΗΡΙΣΤΙΚΑ
ΟΈλεγχος και η αποτύπωση των αποτελεσμάτων γίνεται με
χρήση Η/Υ
Όλες οι ασκήσεις συνδυάζουν χρήση πραγματικών συστημάτων
με χρήση Η/Υ
Οι ασκήσεις έχουν διάρκεια δυο (2) ώρες
Οι ασκήσεις πραγματοποιούνται σε ομάδες των τριών (3) ατόμων.
Στο τέλος του εξαμήνου γίνεται γραπτή εξέταση του εργαστηρίου.
Η εξέταση είναι ατομική και υποχρεωτική.
Όλες οι εργαστηριακές ασκήσεις καλύπτονται σε ικανοποιητικό
βαθμό από τις σημειώσεις του εργαστηρίου κα το βιβλίο θεωρίας.
Στο εργαστήριο εγγράφονται περίπου 150 φοιτητές κάθε εξάμηνο
και έχουμε ποσοστό επιτυχίας περίπου 70%.
4
5.
ΤΡΟΠΟΣ ΒΑΘΜΟΛΟΓΗΣΗΣ
• Κάθεεργαστηριακή άσκηση αποτελείται από πειραματικό μέρος, και μέρος
επεξεργασίας – αξιολόγησης των αποτελεσμάτων.
• Η συμμετοχή του πειραματικού μέρους είναι 50% στη συνολική βαθμολογία
της άσκησης.
• Η συμμετοχή του μέρους επεξεργασίας – αξιολόγησης των αποτελεσμάτων
είναι 50% στη συνολική βαθμολογία της άσκησης.
• Οι εργαστηριακές αναφορές (πειραματικό μέρος, μέρος επεξεργασίας -
αξιολόγησης) παραδίδονται, ηλεκτρονικά, στις προθεσμίες που ορίζονται.
• το τέλος του εξαμήνου γίνεται γραπτή εξέταση του εργαστηρίου. Η
συμμετοχή της εξέτασης στο τελικό βαθμό του εργαστηρίου είναι 40%.
5
6.
16/09/1230/05 66
Θεωρία καιΕφαρμογές
Αυτομάτου Ελέγχου (Θ.Ε.Α.Ε.)
• Εισαγωγική Παρουσίαση θεωρίας (στο εργαστηριο)
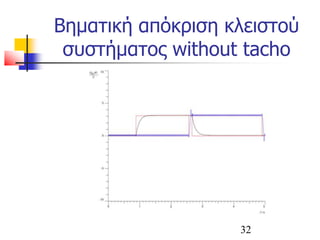
• 1η άσκηση: Σχεδίαση και έλεγχος συστημάτων σέρβο (Έλεγχος γωνιακής θέσης
κινητήρα συνεχούς ρεύματος, DC Servo). DC Servo with tachogenerator (DC
Servo)
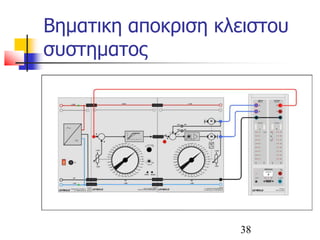
• 2η άσκηση: Έλεγχος της τάσης εξόδου μιας DC γεννήτριας. Έλεγχος της
ταχύτητας (στροφών) ενός DC κινητήρα. (Motor – Generator)
• 3η άσκηση: Αναλογικός & Ψηφιακός Έλεγχος θερμικών συστημάτων.
(Temperature controlled system)
• 4η άσκηση: Διάγνωση Λάθους. (Fault Monitoring)
• 5η άσκηση: Έλεγχος φωτεινότητας (Brightness Control)
• 6η άσκηση: Εξοικείωση με Touch Panel
• Οι ασκήσεις 1,2 και 3 εκτελούνται κυκλικά (ρολόι).
• Οι ασκήσεις 4, 5 και 6 δεν εκτελούνται, προσωρινά, λόγω έλλειψης
προσωπικού.
6
7.
ΣΥΣΤΑΣΗ – “ΡΟΛΟΙ”
ΣΥΣΤΑΣΗ
Συνιστάται,από
εκπαιδευτική άποψη, στους
φοιτητές να
παρακολουθούν το
εργαστήριο του μαθήματος
ΣΥΣ402, μόνο, εάν, έχουν
παρακολουθήσει το
εργαστήριο του μαθήματος
ΣΥ401.
“ΡΟΛΟΙ”
• Για λόγους οικονομίας υλικού, οι
φοιτητές δεν πραγματοποιούν
ταυτόχρονα την ίδια άσκηση, σε
όλους τους πάγκους
• Ταυτόχρονα γίνονται όλες οι
ασκήσεις, δηλαδή:
1. Δυο (2) ομάδες την άσκηση servo
2. Δυο (2) ομάδες την άσκηση motor
3. Δυο (2) ομάδες την άσκηση
temperature
4. Τέσσερις ομάδες (4) έχουν κενό
7
ΣΥΝΔΕΣΗ ΜΕ ΤΟΜΑΘΗΜΑ
• Στο εργαστήριο, θα μελετήσουμε, τη συμπεριφορά και
τον έλεγχο πραγματικών συστημάτων, με χρήση PID
ελεγκτή.
• Στο εργαστήριο, θα κατανοήσουμε, «απτά», κλασσικά
προβλήματα αυτομάτου έλεγχου, όπως έλεγχο στρόφων
κινητήρα ή έλεγχο τάσης γεννήτριας
• Στο εργαστήριο, θα διαπιστώσουμε, «απτά», τη
καταλληλόλητα ή μη ενός ελεγκτή, στο πρόβλημα που
εξετάζουμε
•
9
10.
16/09/1230/05 10
MEASUREMENT &CONTROL TECHNOLOGY
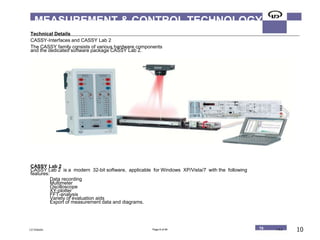
Technical Details
CASSY-Interfaces and CASSY Lab 2
The CASSY family consists of various hardware components
and the dedicated software package CASSY Lab 2.
CASSY Lab 2
CASSY Lab 2 is a modern 32-bit software, applicable for Windows XP/Vista/7 with the following
features:
Data recording
Multimeter
Oscilloscope
XY-plotter
FFT-analysis
Variety of evaluation aids
Export of measurement data and diagrams.
LD Didactic Page 8 of 94 T8 T 8.2 10
11.
Νέα Δομή Ασκήσεων
•Υλοποιούμε τη συνδεσμολογία
• Φορτώνουμε το αντίστοιχο «αρχείο» του
πειράματος
• Ρυθμίζουμε slider
• F9
• Zoom & Marker
11
12.
Διαφορετική «λογική» σε
σχέσημε ΣΥΣ401
• Λιγότερες μετρήσεις
• Στοχευμένες, μετρήσεις
• Έμφαση στην αξιολόγηση – κατανόηση
των αποτελεσμάτων - μετρήσεων
12
13.
13
Σύστημα Ελέγχου Διεργασίας
R(s)+ C(s)
- A(s)
B(s)
Σκοπός ενός συστήματος αυτόματου ελέγχου διεργασίας
είναι να διατηρεί σταθερή την έξοδό του σε επίδραση
διαταραχών (απορρίπτει τις διαταραχές που οφείλονται σε
μεταβολές του φορτίου κλπ.)
Η συνολική συνάρτηση μεταφοράς με αρνητική ανάδραση
είναι:
G(s)
D(s)
)()(1
)(
)(
)(
sDsG
sG
sR
sC
13
14.
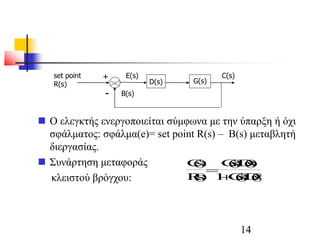
14
set point
R(s)
E(s)
D(s) G(s)
C(s)
Ο ελεγκτής ενεργοποιείται σύμφωνα με την ύπαρξη ή όχι
σφάλματος: σφάλμα(e)= set point R(s) – B(s) μεταβλητή
διεργασίας.
Συνάρτηση μεταφοράς
κλειστού βρόγχου:
Cs
Rs
GsDs
GsDs
()
()
() ()
() ()
1
B(s)
+
-
14
15.
15
Διαδικασία σχεδίασης
Μια προτεινόμενημέθοδος σχεδίασης δίνεται ως ακολούθως:
Προδιαγραφές καλής απόδοσης
Εννοιολογικός σχεδιασμός
Μαθηματική μοντελοποίηση
Εγκυρότητα μοντέλου και αναγνώριση μοντέλων
Ανάλυση του μαθηματικού μοντέλου
Τροποποίηση και επαναλήψεις
Κατασκευή και έλεγχος
15
1. DC Servo
ΠΡΑΓΜΑΤΙΚΟΣΥΣΤΗΜΑ
• Έλεγχος της γωνιακής θέσης με
χρήση ενός κινητήρα συνεχούς
ρεύματος με τη χρήση ενός ή δύο
κλάδων ανατροφοδότησης, της
θέσης και της ταχύτητας, με
χρήση μιας ταχογενήτριας.
• Υπολογισμός συχνότητας
αποκοπής
26
Υπολογισμός συχνότητας αποκοπής
Τασυστήματα Servo
ανταποκρίνονται και σε ac εντολές
(μέχρι μια ορισμένη συχνότητα).
Έτσι μπορούν να θεωρηθούν
ως ένα κατωδιαβατο φίλτρο που
έχει νόημα ο υπολογισμός της
συχνότητας αποκοπής.
Υπολογισμός συχνότητας
αποκοπής
Δφ=45 μοίρες ή V2= 0.707 V1
34
Συμπέρασμα
Στο τέλος τουεργαστηρίου, σε
συνδυασμό με το μάθημα, θα έχουμε
κατανοήσει, το τρόπο έλεγχου της
αποτελεσματικότητας ενός
οποιουδήποτε ελεγκτή, με μια
οποιαδήποτε μέθοδο, σε ένα
οποιοδήποτε σύστημα
67
68.
Σχέση με τηναγορά
Η ρύθμιση των ελεγκτών σε ένα Σύστημα
Αυτόματου Έλεγχου, αποτελεί το κύριο
ζητούμενο, στην ελληνική αγορά
(βιομηχανία), σήμερα
68