2e jaars studenten van HAN Embedded Systems Engineering hadden een project waarin ze een hoovercraft ombouwden met printplaatjes en eigen software voor de besturing.
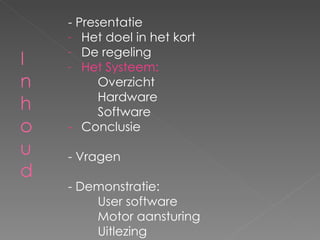
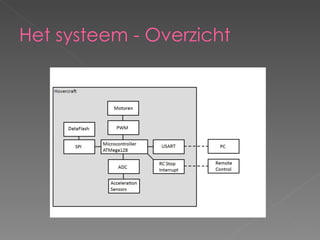
- Presentatie Hetdoel in het kort De regeling Het Systeem: Overzicht Hardware Software - Conclusie - Vragen - Demonstratie: User software Motor aansturing Uitlezing
- Presentatie Hetdoel in het kort De regeling Het Systeem: Overzicht Hardware Software - Conclusie - Vragen - Demonstratie: User software Motor aansturing Uitlezing
- Presentatie Hetdoel in het kort De regeling Het Systeem: Overzicht Hardware Software - Conclusie - Vragen - Demonstratie: User software Motor aansturing Uitlezing
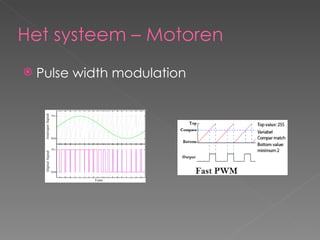
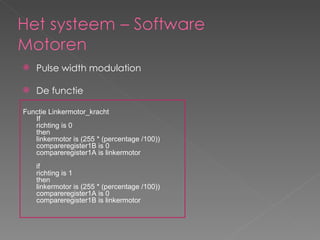
Pulse width modulationDe functie Functie Linkermotor_kracht If richting is 0 then linkermotor is (255 * (percentage /100)) compareregister1B is 0 compareregister1A is linkermotor if richting is 1 then linkermotor is (255 * (percentage /100)) compareregister1A is 0 compareregister1B is linkermotor
30.
31.
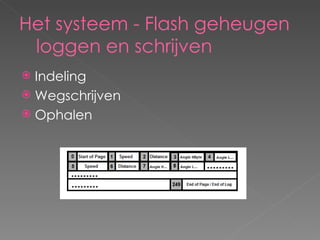
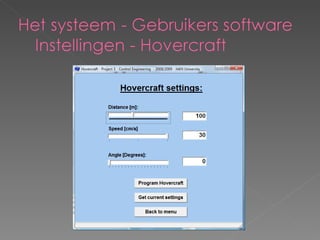
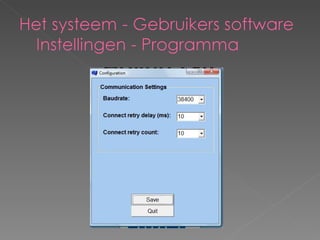
Het systeem -Gebruikers software Instellingen Hovercraft Instellingen Afstand Snelheid Hoek Programma instellingen Baud rate Timeouts Retries
32.
33.
34.
Het systeem -Gebruikers software Uitlezen & Grafieken Uitlezen Grafieken
35.
36.
37.
- Presentatie Hetdoel in het kort De regeling Het Systeem: Overzicht Hardware Software - Conclusie - Vragen - Demonstratie: User software Motor aansturing Uitlezing
- Presentatie Hetdoel in het kort Eisen De regeling Het Systeem: Overzicht Hardware Software Conclusie - Vragen - Demonstratie User software Motor aansturing Uitlezing