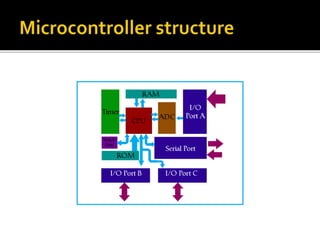
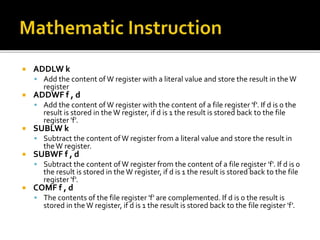
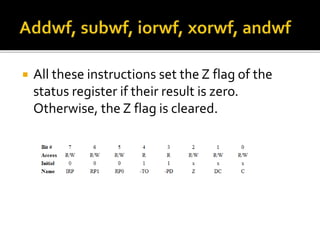
The document describes microcontrollers, specifically the PIC family from Microchip Technology, noting their all-in-one design compared to microprocessors, which require additional components. It details various functionalities, programming instructions, and applications for microcontrollers, including tasks such as controlling circuits for robots, clocks, and other devices. Additionally, it provides an overview of basic instruction sets for programming using MPLAB and interfacing with PIC chips.