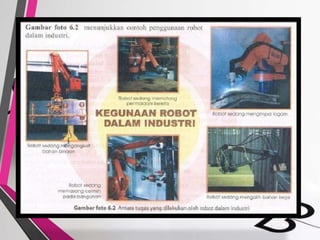
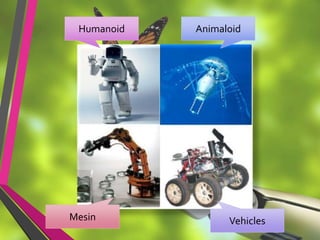
Robotik merupakan ilmu yang mempelajari reka bentuk, aplikasi, dan penggunaan robot. Robot digunakan untuk menjalankan kerja-kerja berulang, berbahaya, dan memerlukan ketelitian tinggi untuk menggantikan manusia. Terdapat beberapa jenis robot seperti humanoid, animaloid, mesin, dan kenderaan bergantung kepada bentuk dan fungsinya. Proses pembuatan robot melibatkan tahap mekanik, elektronik, dan pemrogramann

































































![Modul Ajar Kurikulum Berbasis Cinta (KBC) SKI Kelas 11 [modulguruku.com]](https://cdn.slidesharecdn.com/ss_thumbnails/modulajarkurikulumberbasiscintakbcskikelas11mamodulguruku-260211160930-802ab0b6-thumbnail.jpg?width=640&height=640&fit=bounds)






