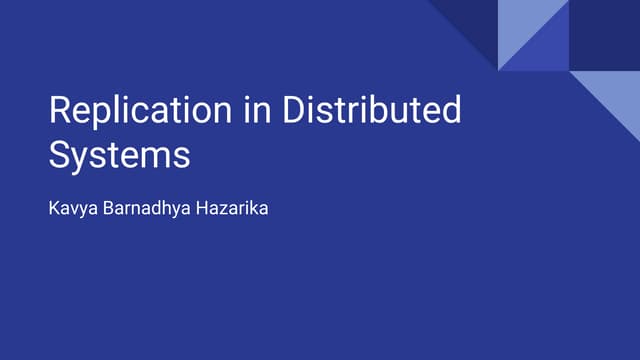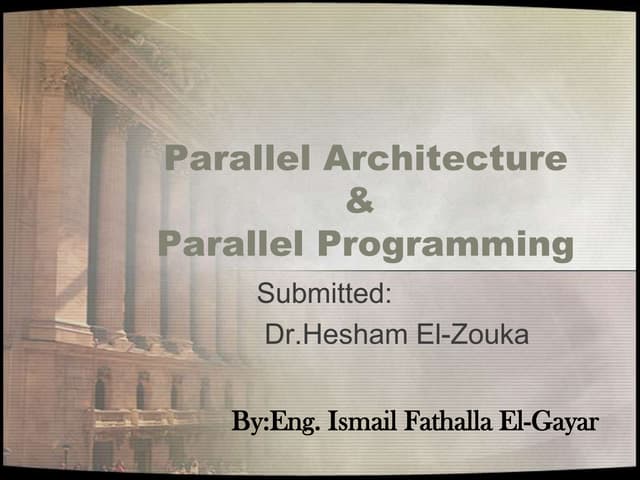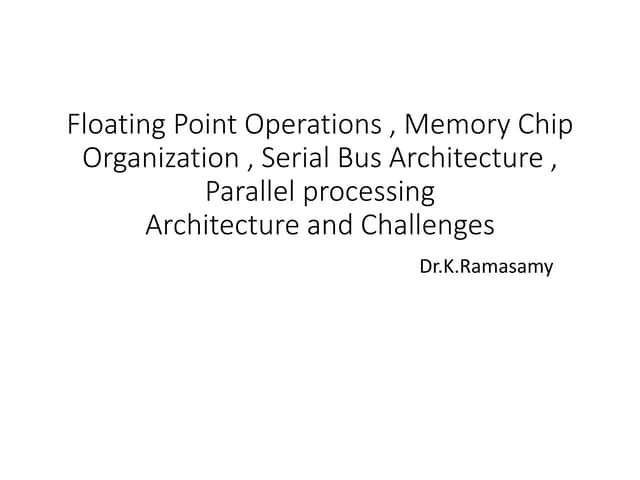
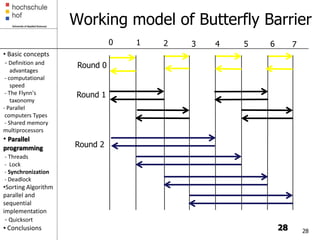
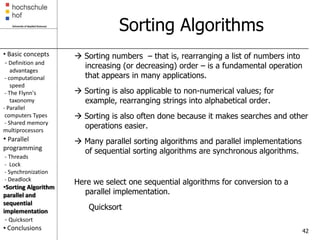
![Example
• Basic concepts
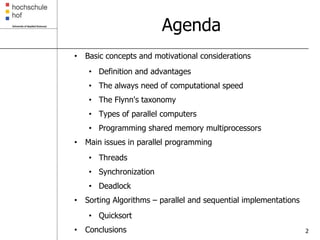
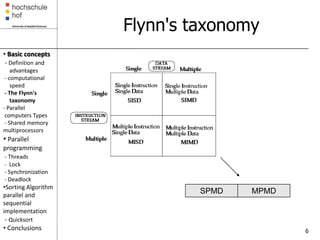
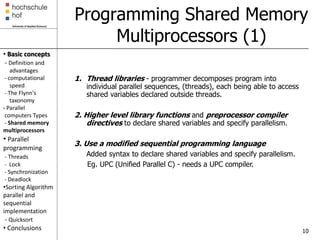
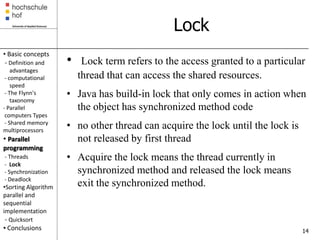
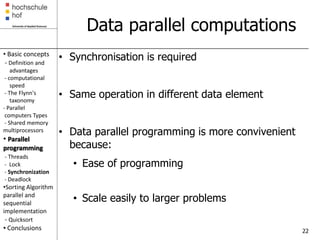
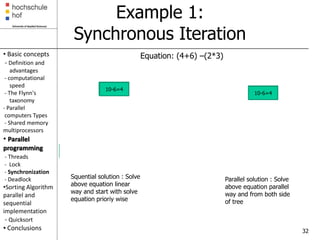
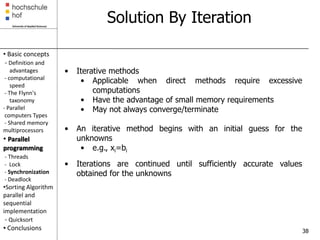
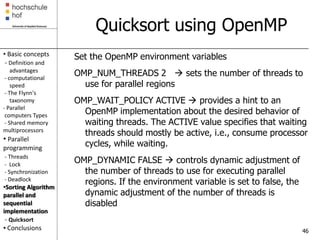
- Definition and •For(i=0;i<n;i++)
advantages
- computational •a[i]=a[i]+k
speed
- The Flynn's
taxonomy a[]=a[]+
- Parallel
computers Types k;
- Shared memory
multiprocessors
• Parallel
programming
- Threads
- Lock
- Synchronization a[n-1]=a[n-
a[0]=a[0]+k a[1]=a[1]+k
- Deadlock 1]+k
•Sorting Algorithm
parallel and
sequential
implementation
A[0]
A[1] A[n-1]
- Quicksort
• Conclusions 24](https://image.slidesharecdn.com/parallelprogramming-13452777741194-phpapp01-120818033618-phpapp01/85/Parallel-Programming-24-320.jpg)
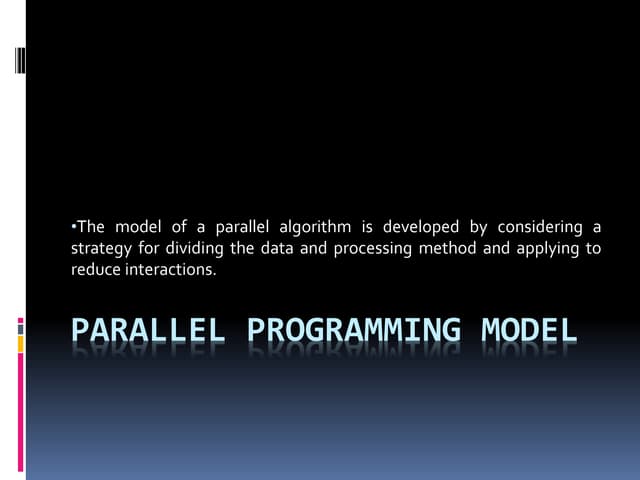
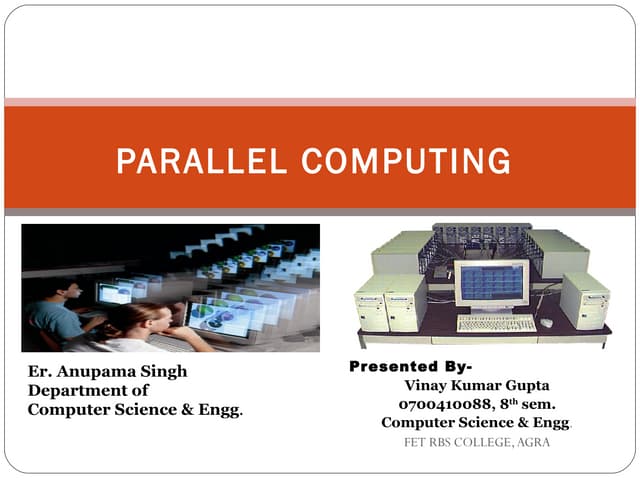
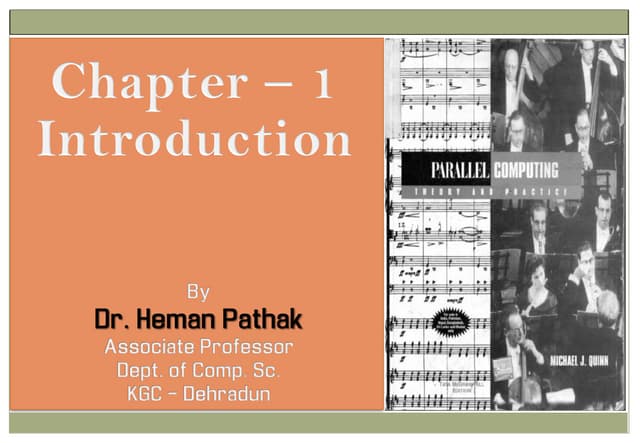
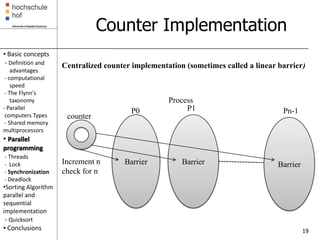
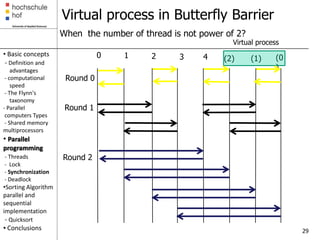
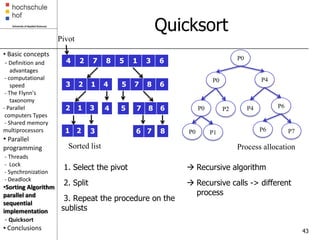
![Barrier Requirement
• Basic concepts
- Definition and
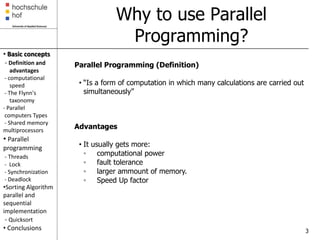
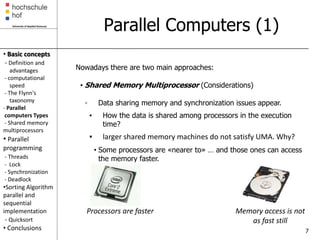
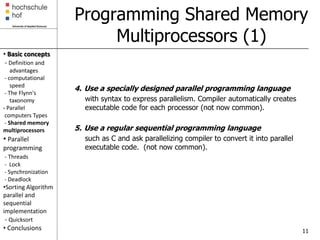
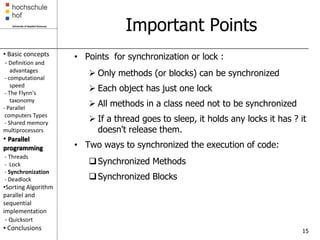
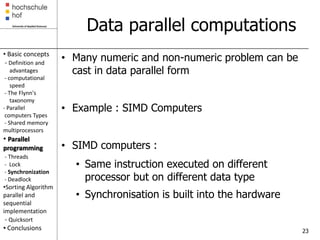
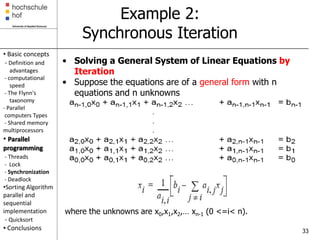
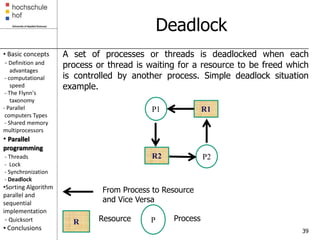
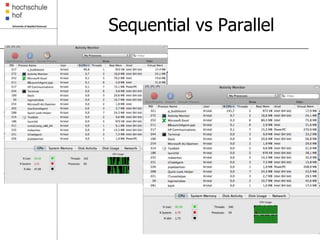
• Data parallel technique is applied to Multiprocessor
advantages or Multicomputer .
- computational
speed
- The Flynn's
taxonomy
- Parallel • The whole construct should not be completed before
computers Types
- Shared memory the instances thus a barrier is required .
multiprocessors
• Parallel
programming
- Threads
- Lock
• Forall(i=0; i<n;i++)
- Synchronization
- Deadlock a[i]=a[i] +k;
•Sorting Algorithm
parallel and
sequential
implementation
- Quicksort
• Conclusions 25](https://image.slidesharecdn.com/parallelprogramming-13452777741194-phpapp01-120818033618-phpapp01/85/Parallel-Programming-25-320.jpg)
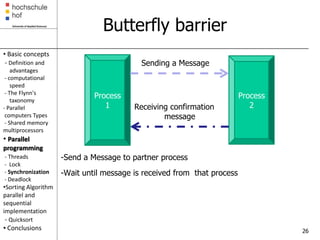
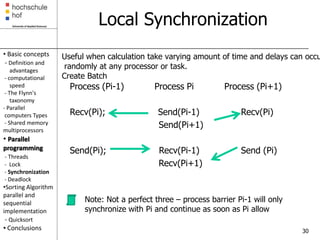
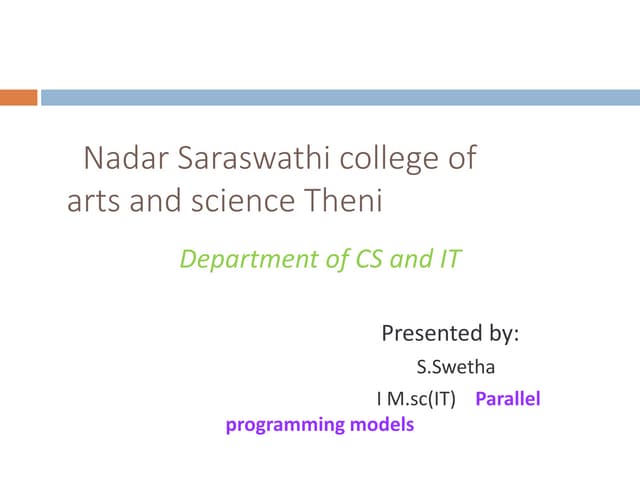
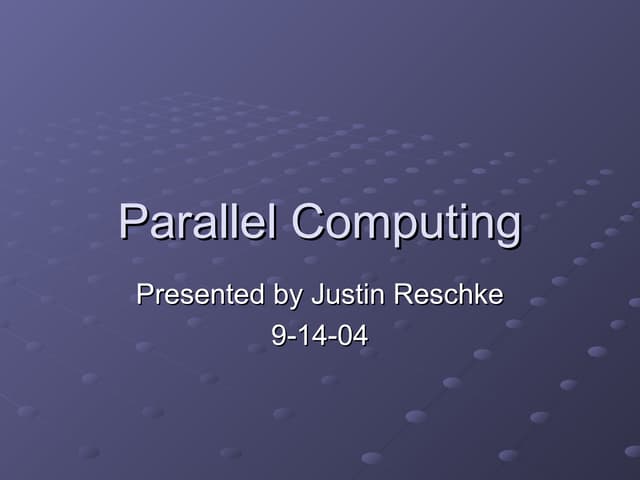
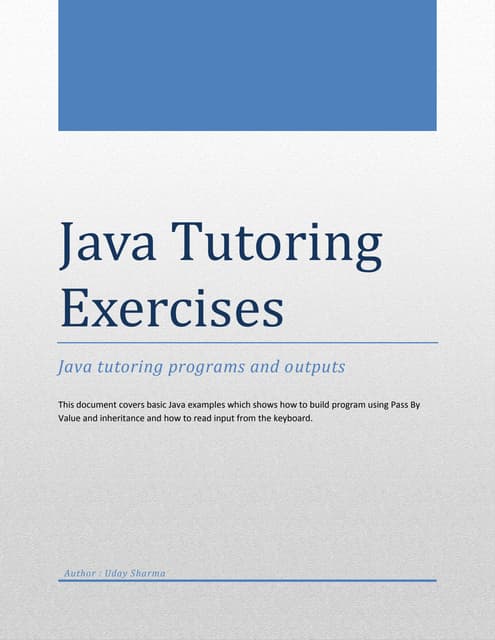
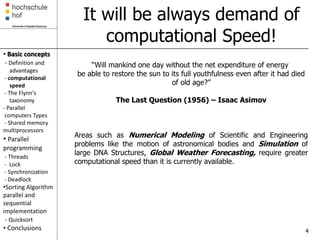
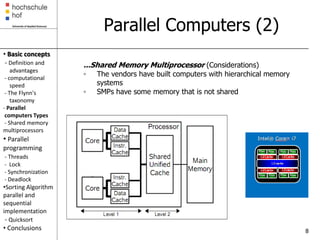
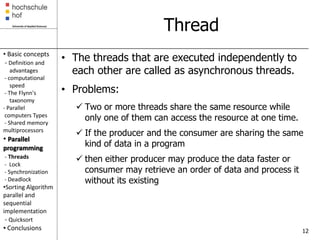
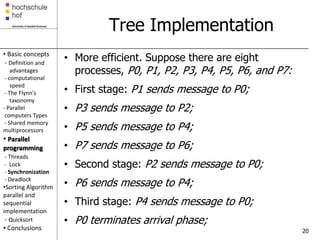
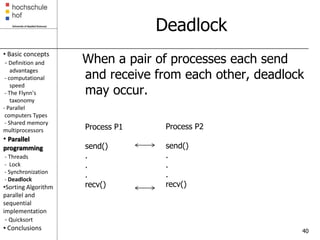
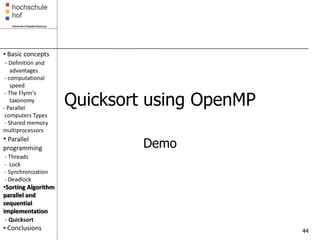
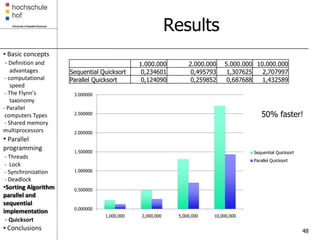
![Sequential Code
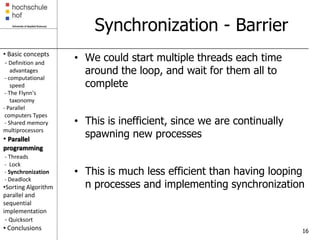
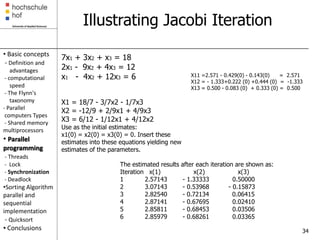
• Basic concepts 7x1 + 3x2 + x3 = 18
for (i=0; i<n; i++) 2x1 - 9x2 + 4x3 = 12
- Definition and
advantages x[i] = b[i]; x1 - 4x2 + 12x3 = 6
- computational for (iter = 0; iter < limit;
Use as the initial estimates:
speed
- The Flynn's
iter++){ x1(0) = x2(0) = x3(0) = 0. Insert these
taxonomy for (i=0; i<n; i++){ estimates into these equations yielding new
estimates of the parameters.
- Parallel sum = 0;
computers Types
- Shared memory
for (j=0; j<n; j++) Iteration 1:
newx[0] = (18 – 0)/7 = 2.571
multiprocessors if (i != j)
• Parallel sum = sum + newx[1] = - (12 – 0)/9 = -1.333
programming a[i][j]*x[j]; newx[2] = (6 – 0)/12 = 0.500
- Threads
- Lock x1(1) = 2.571 x2(1) = -1.333 x3(1) = 0.500
- Synchronization newx[i] = (b[i]- sum)/a[i][i]
- Deadlock Iteration 2:
•Sorting Algorithm } newx[0] = 2.571 +0.500357= 3.071
parallel and
sequential for (i=0; i<n; i++)
newx[1] = -1.333+0.792762 = -
implementation x[i] = newx[i]; 0.540
- Quicksort } newx[2] = 0.500 -0.657282 = - 0.158
• Conclusions 35](https://image.slidesharecdn.com/parallelprogramming-13452777741194-phpapp01-120818033618-phpapp01/85/Parallel-Programming-35-320.jpg)
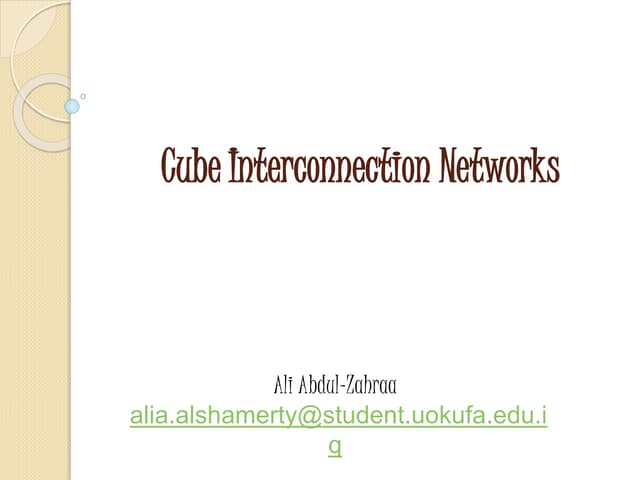
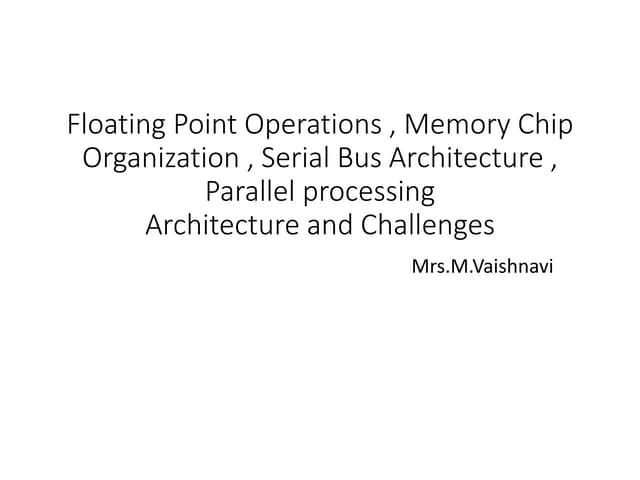
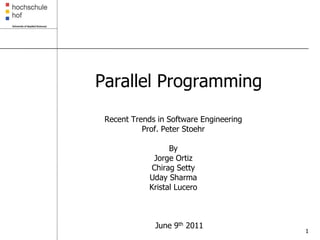
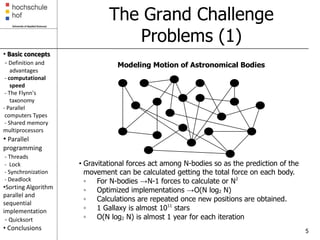
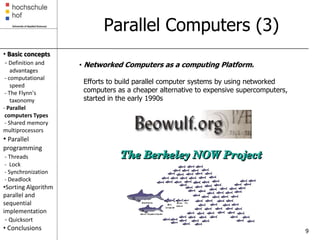
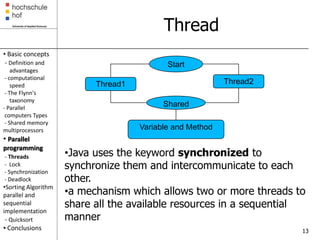
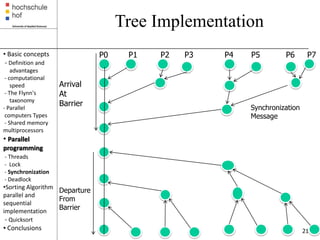
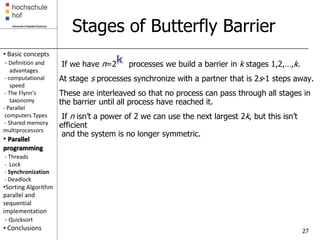
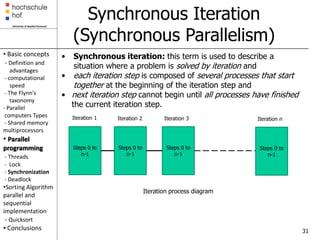
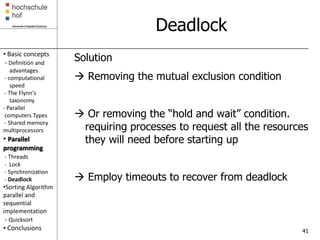
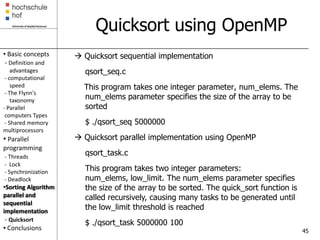
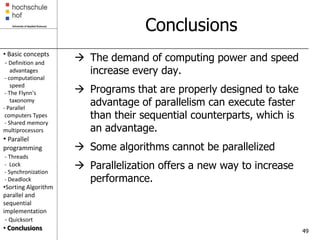
![Parallel Code
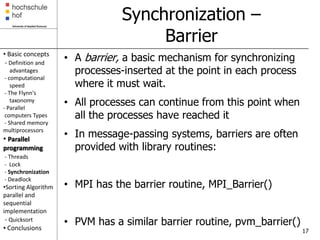
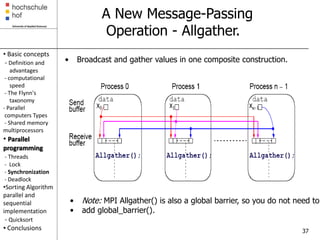
• Suppose we have a process Pi for each unknown xi; the code
for process Pi may be:
• Basic concepts x[i] = b[i]
- Definition and Iteration 1
for (iter = 0; iter < limit; iter++) Broadcast_Rv
advantages {
X1[0]=2.571 X1[0]=2.571
- computational sum = -a[i][i] * x[i];
speed for (j = 0; j < n; j++) X1[1]=-1.333 X1[1]=-
- The Flynn's sum = sum + a[i][j] * x[j]; 1.333
taxonomy new_x[i] = (b[i] - sum) /a[i][i]; X1[2]=0.5 X1[2]=0.5
- Parallel broadcast_receive(&new_x[i]); Iteration 2 X2[0] =
computers Types global_barrier(); 3.071
- Shared memory } X2[0] = 3.071 X2[1]= -
multiprocessors • broadcast receive() is used 0.540
X2[1]= - X2[2]=-
• Parallel here 0.540 0.158
programming (1) to send the newly computed
X2[2]=- X3[0] =
- Threads value of x[i] from process Pi to 2.825
0.158
every other process and (2) to X3[1]= -
- Lock Iteration 3
collect data broadcasted from any 0.721
- Synchronization
other processes to process Pi. X2[0] = X3[2]=
- Deadlock 2.825 0.064
•Sorting Algorithm X2[1]= -
parallel and 0.721
sequential X2[2]=-
implementation 0.064
- Quicksort
• Conclusions Recieve Send
36](https://image.slidesharecdn.com/parallelprogramming-13452777741194-phpapp01-120818033618-phpapp01/85/Parallel-Programming-36-320.jpg)

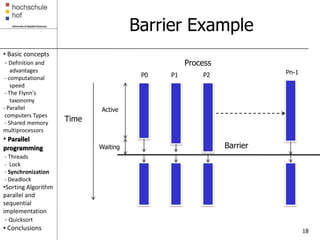
This document discusses parallel programming concepts including threads, synchronization, and barriers. It defines parallel programming as carrying out many calculations simultaneously. Advantages include increased computational power and speed up. Key issues in parallel programming are sharing resources between threads, and ensuring synchronization through locks and barriers. Data parallel programming is discussed where the same operation is performed on different data elements simultaneously.