Download as PDF, PPTX
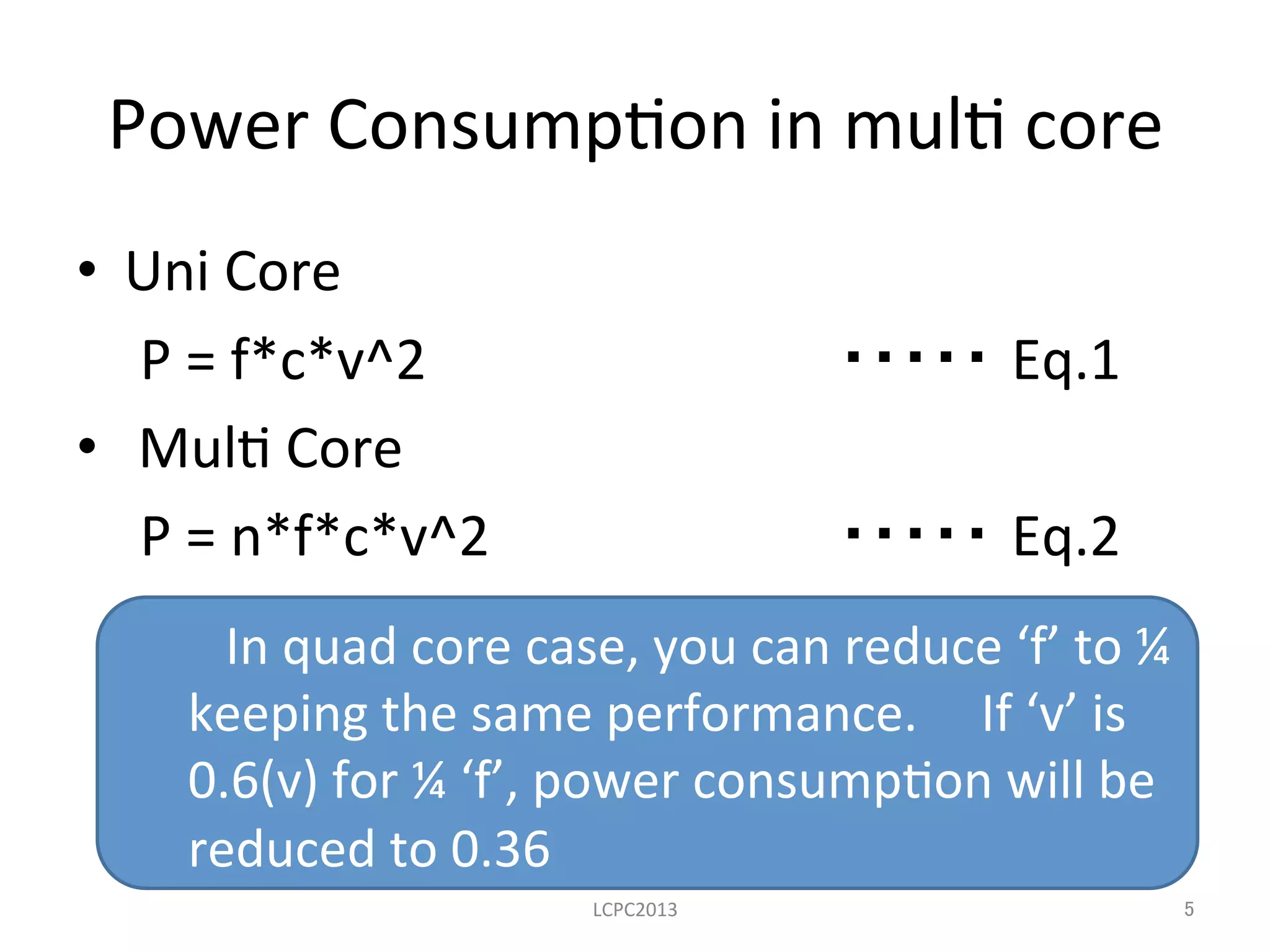
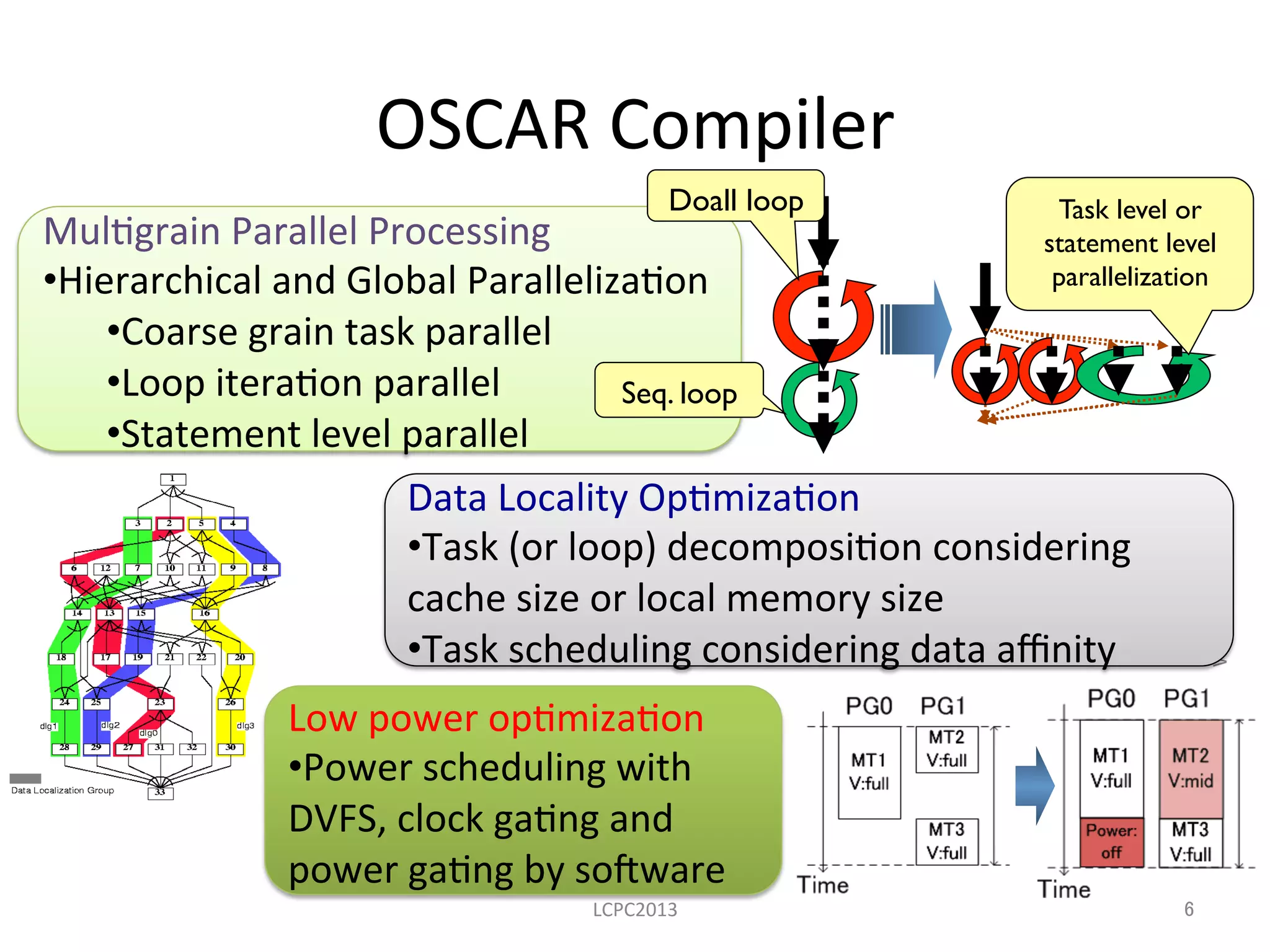
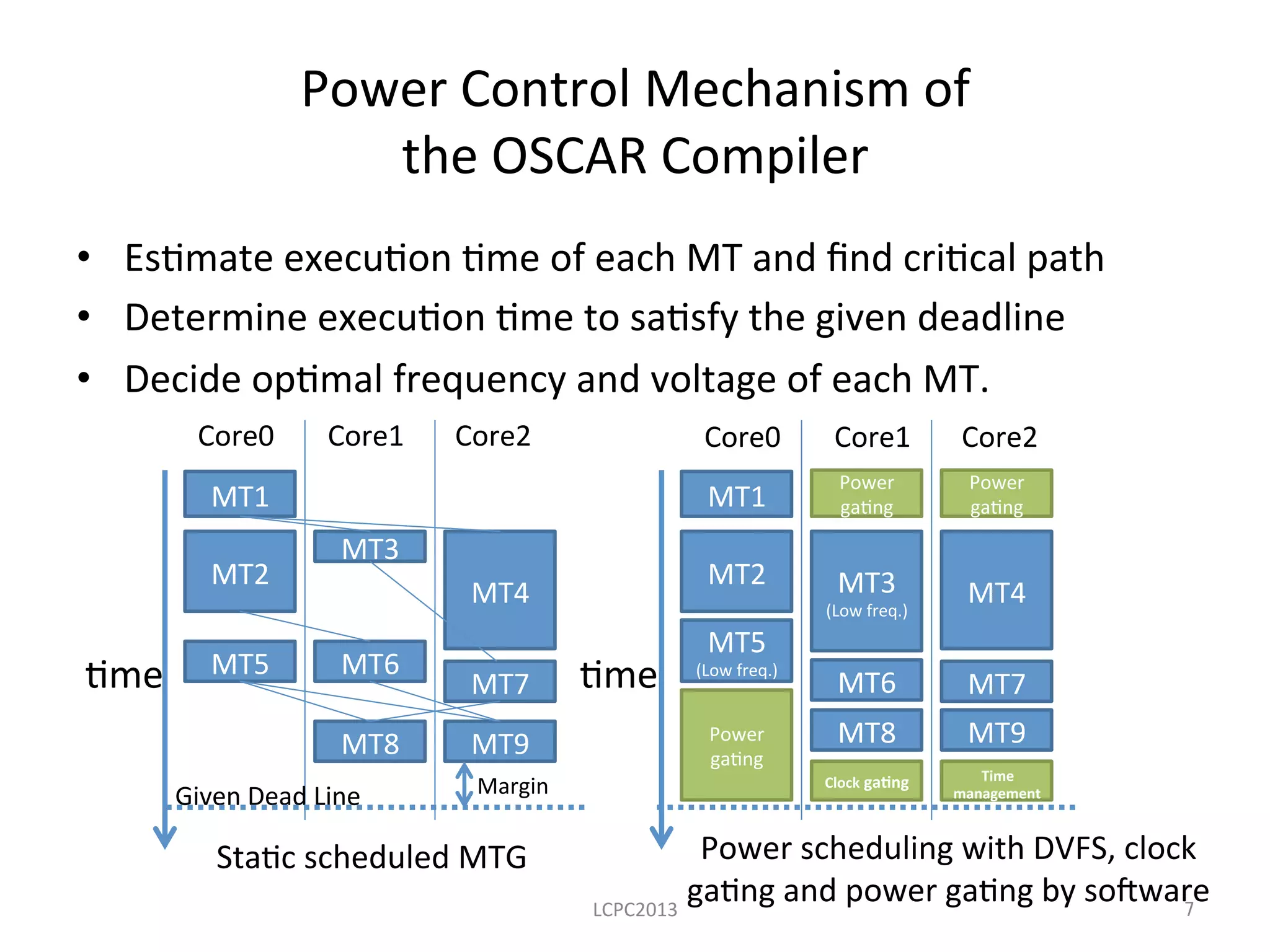
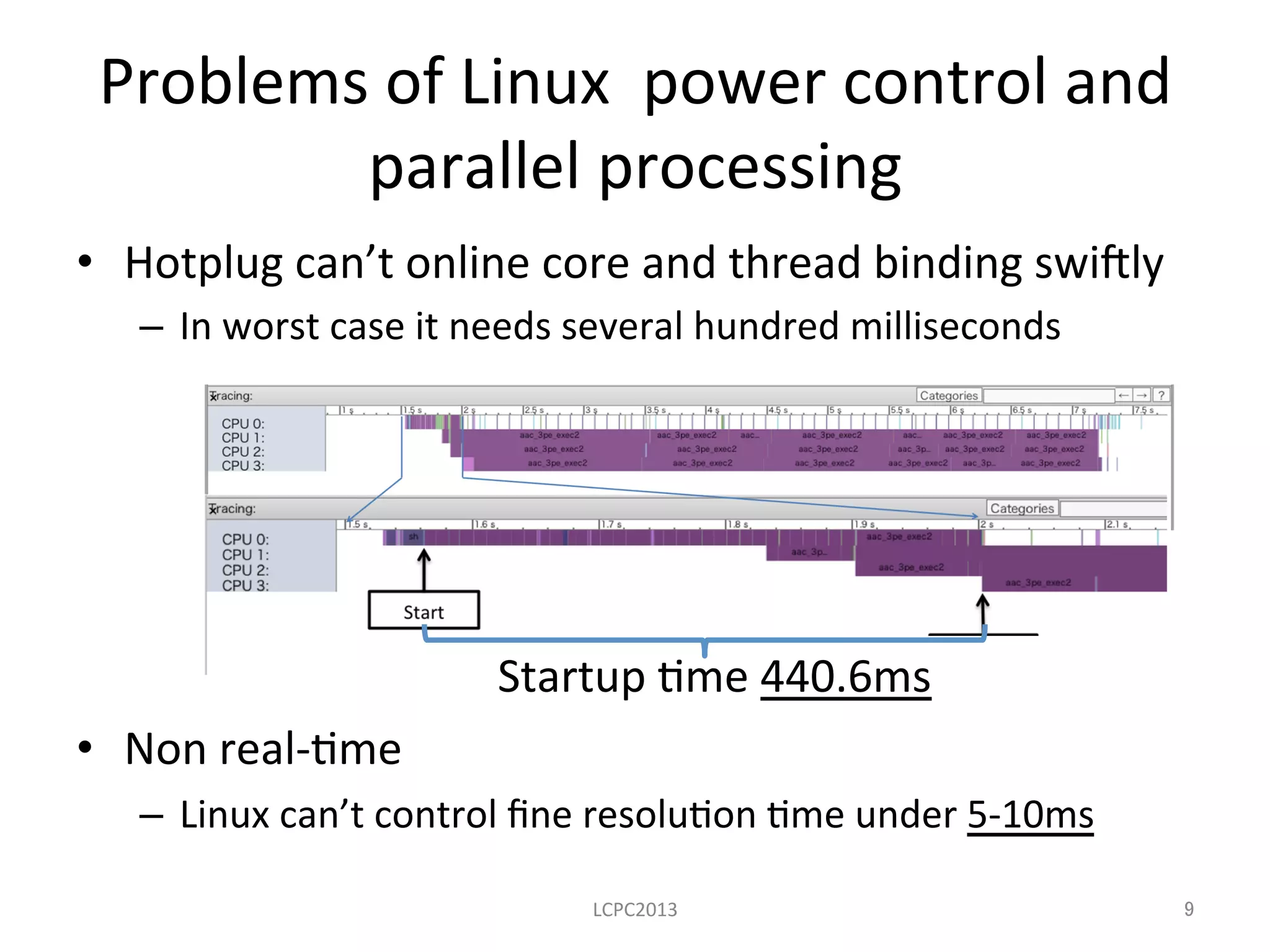
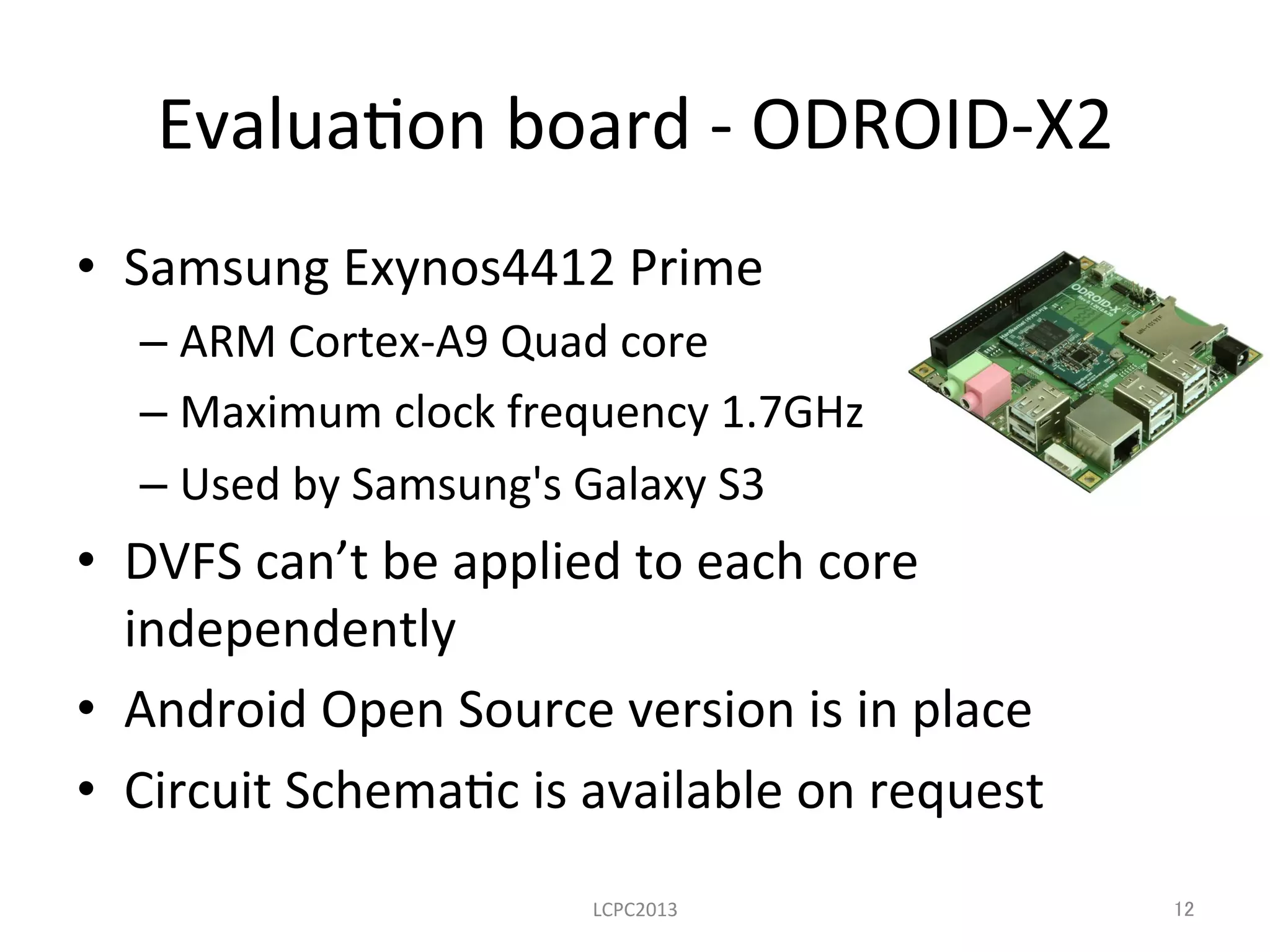
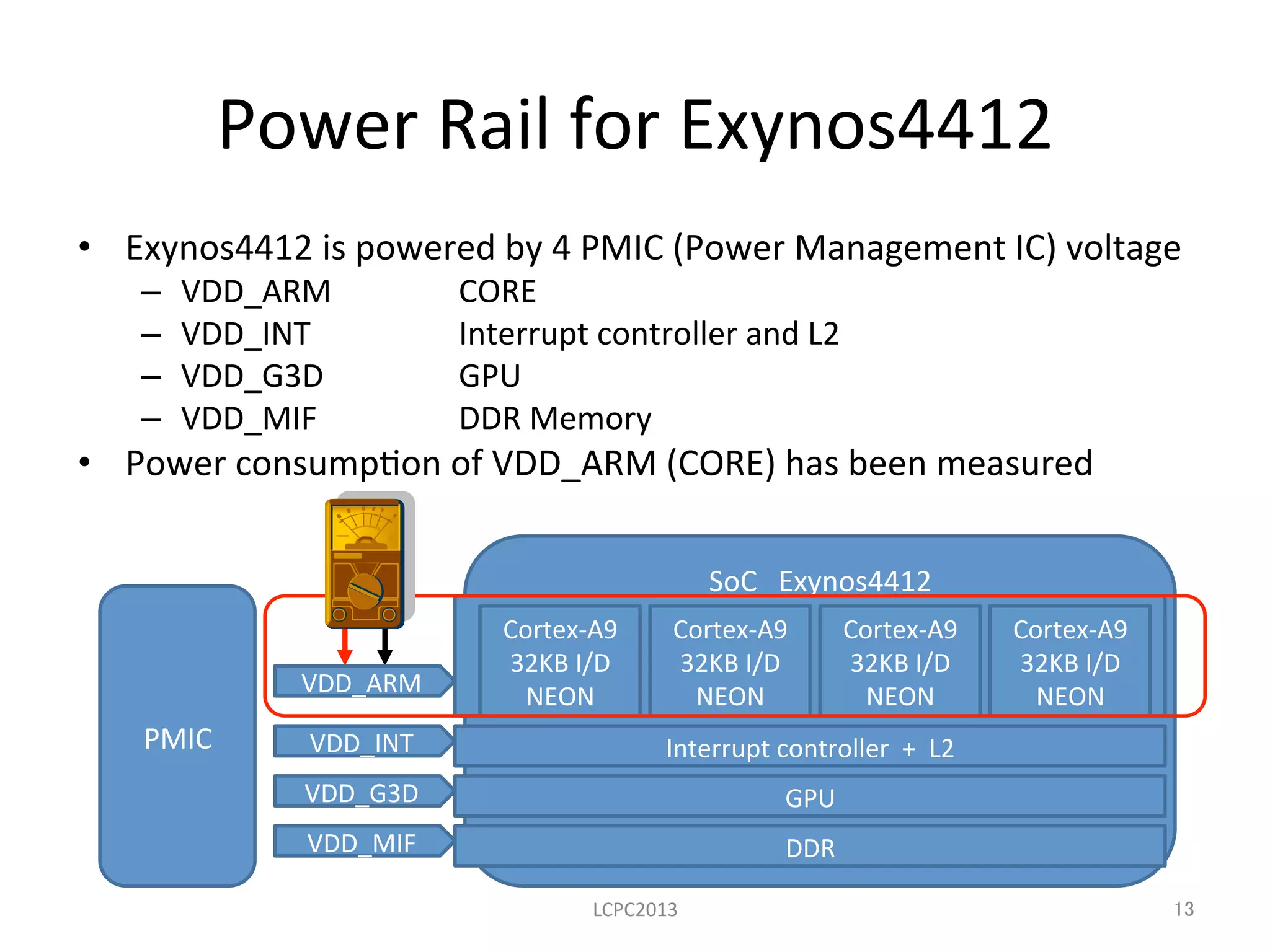
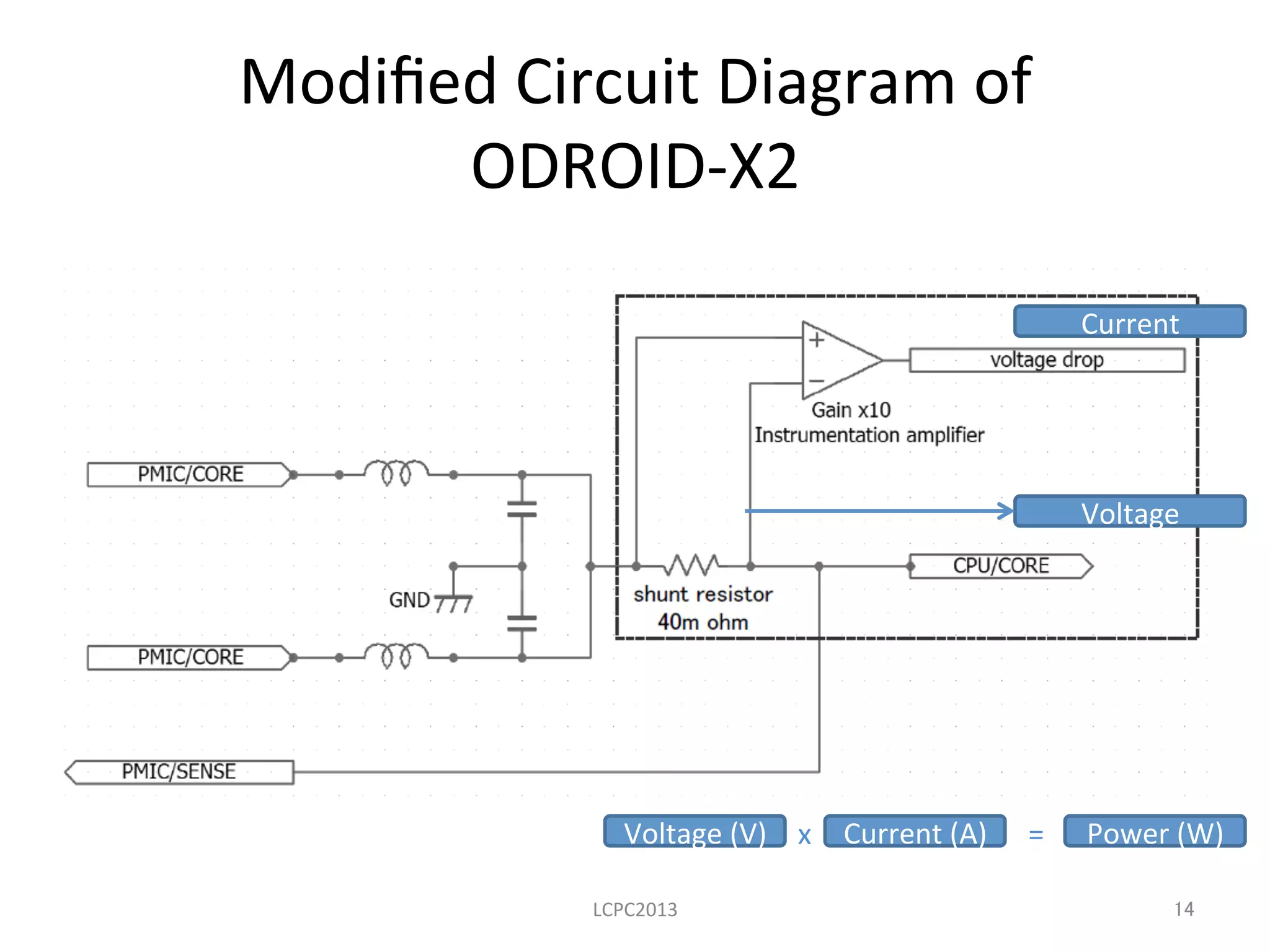
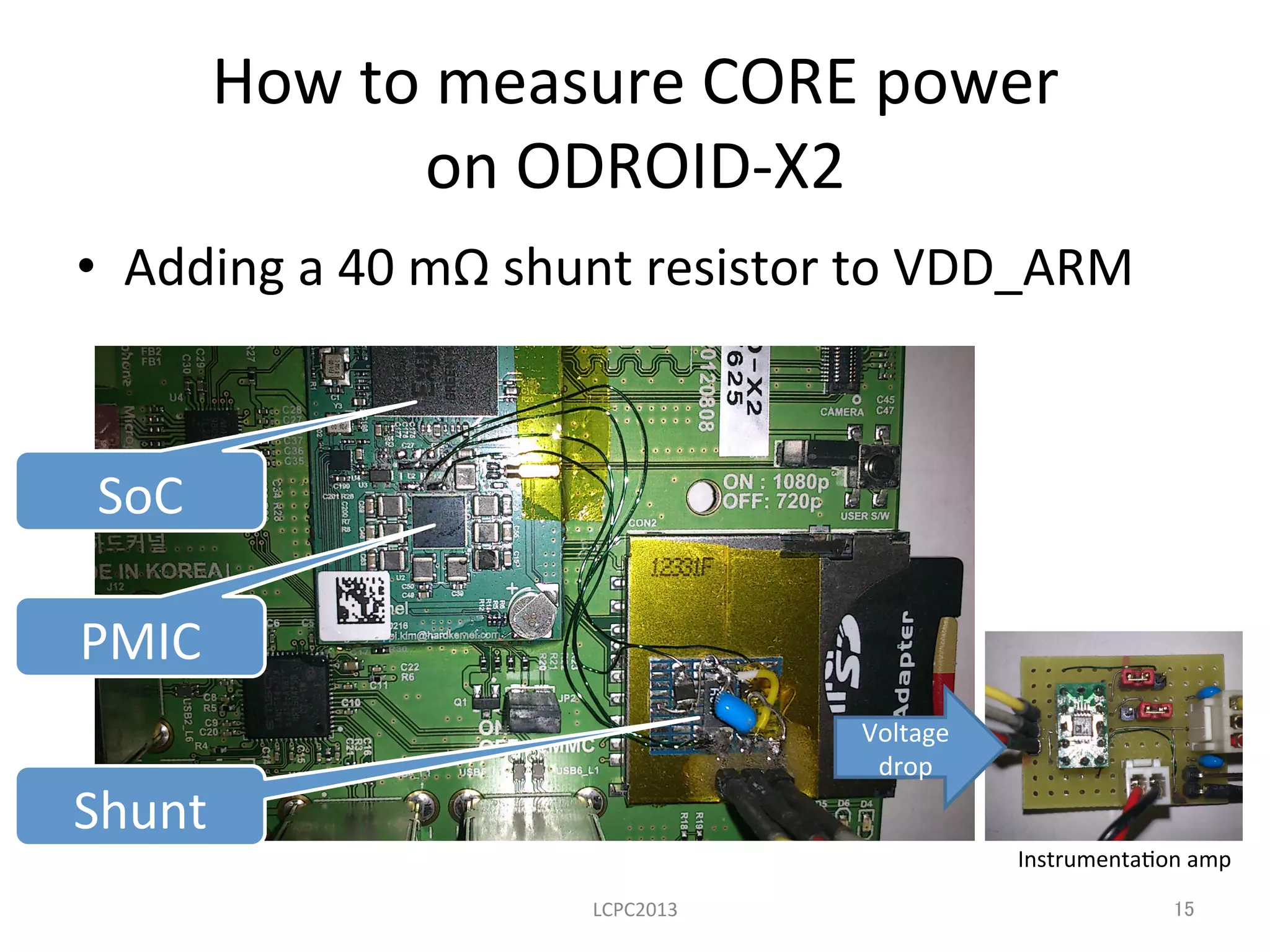
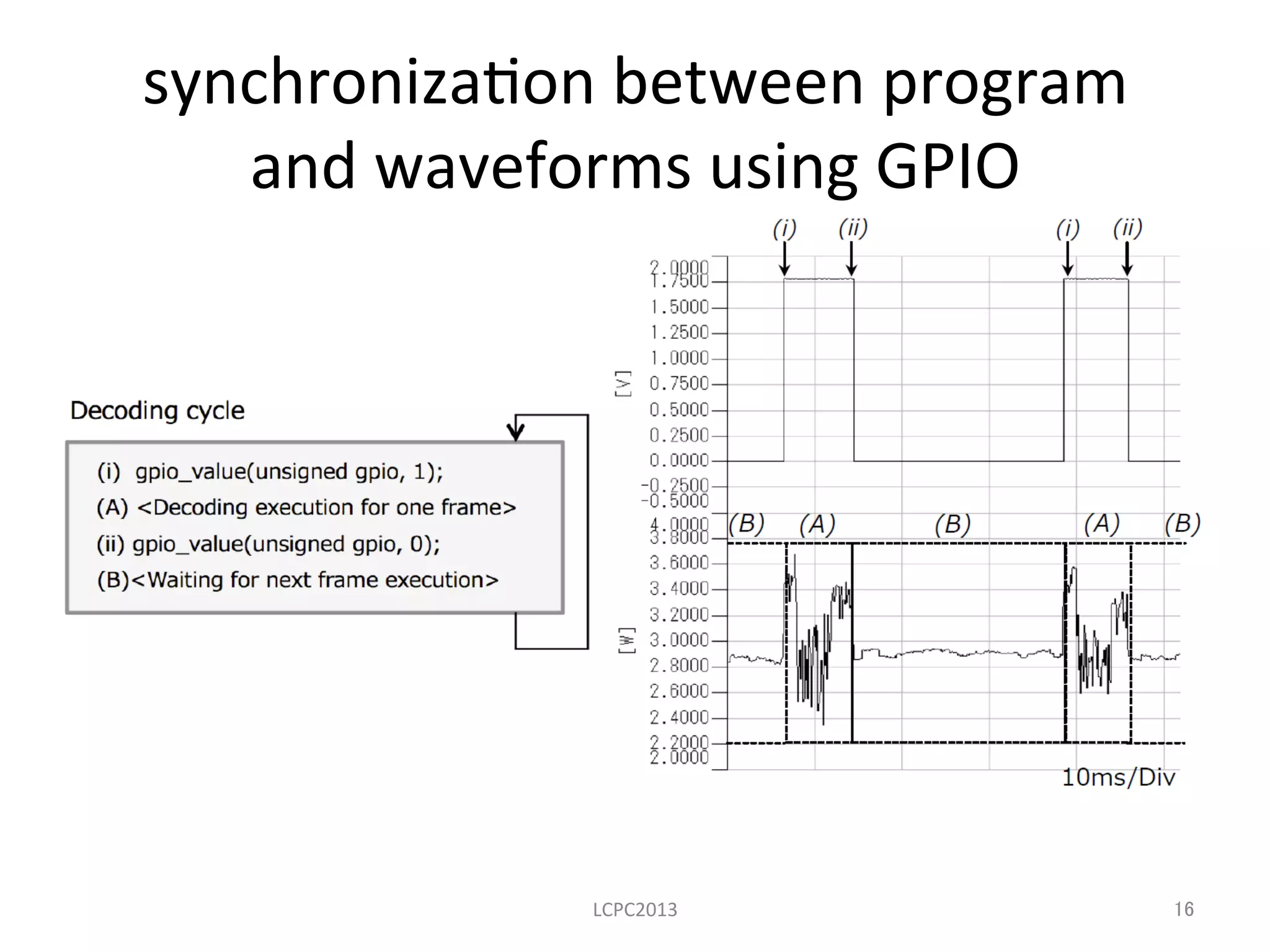
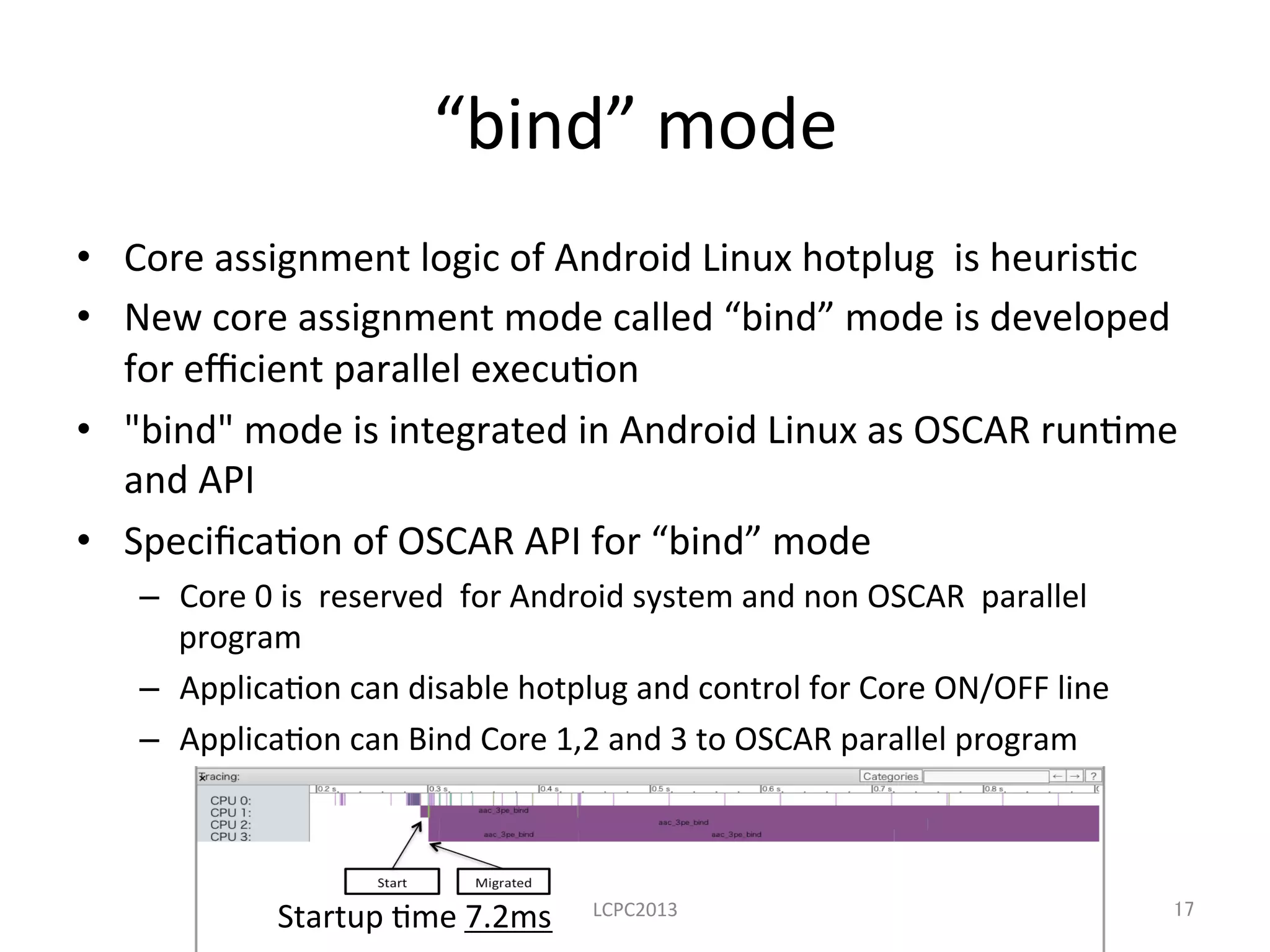
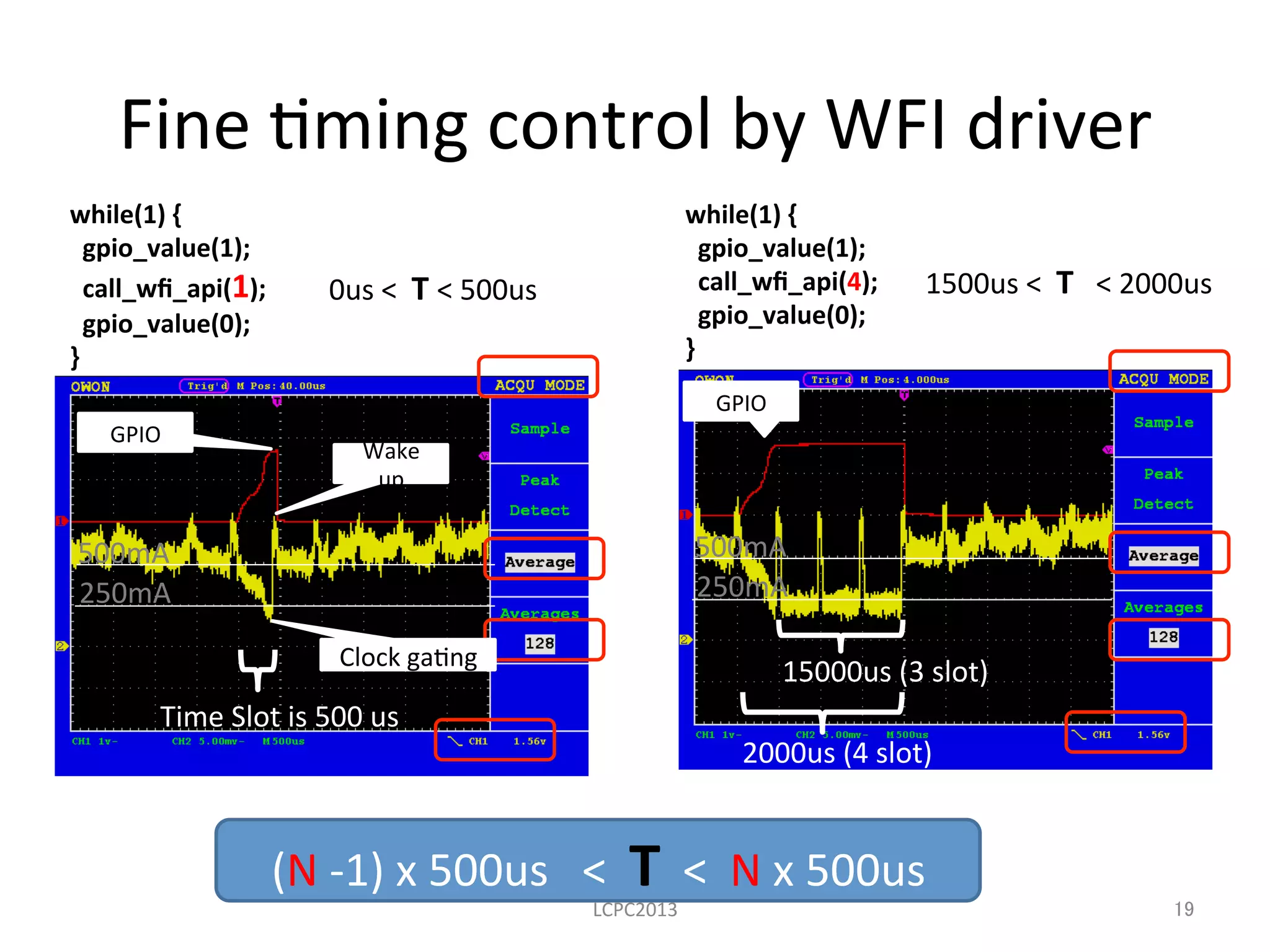
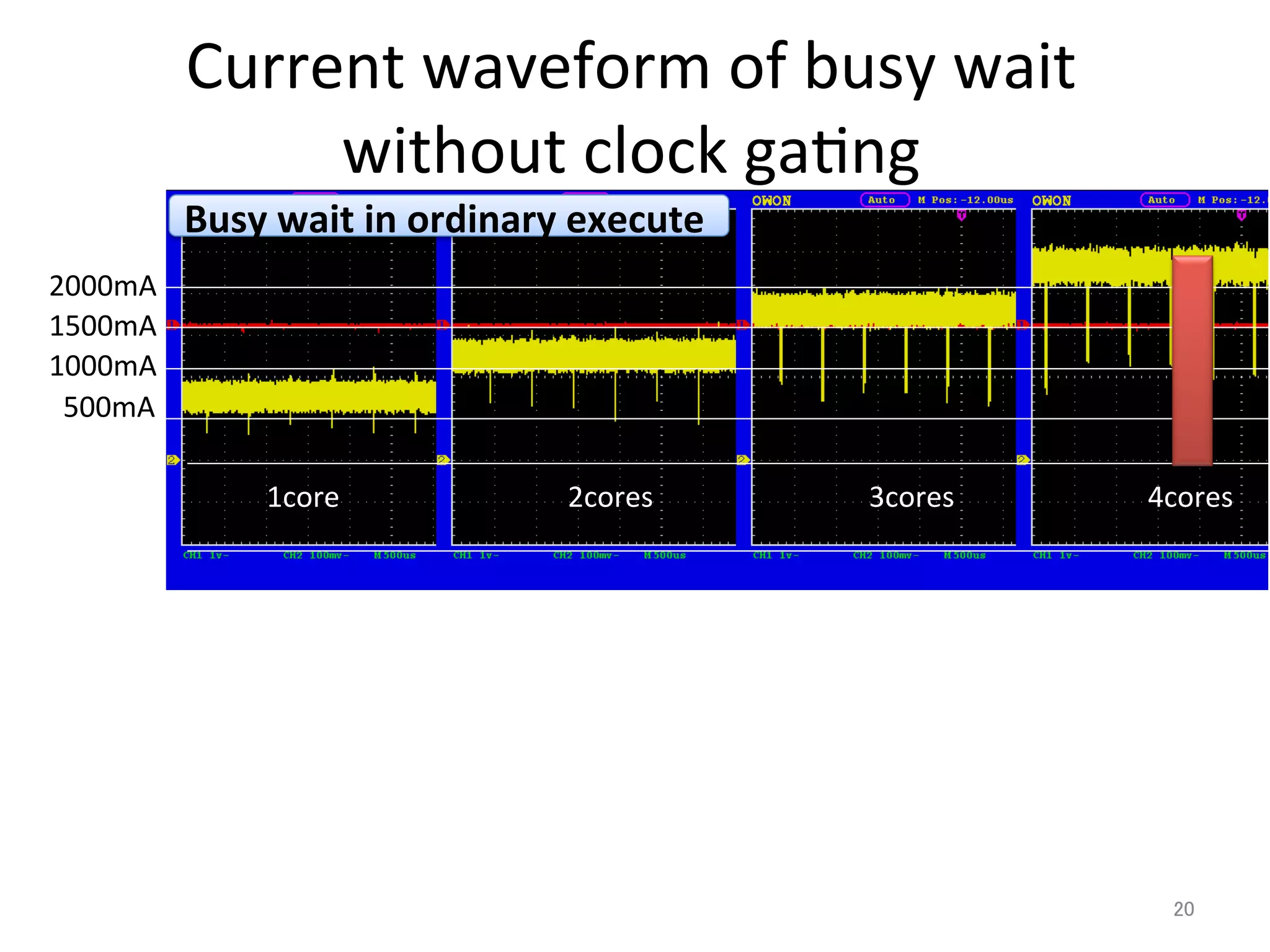
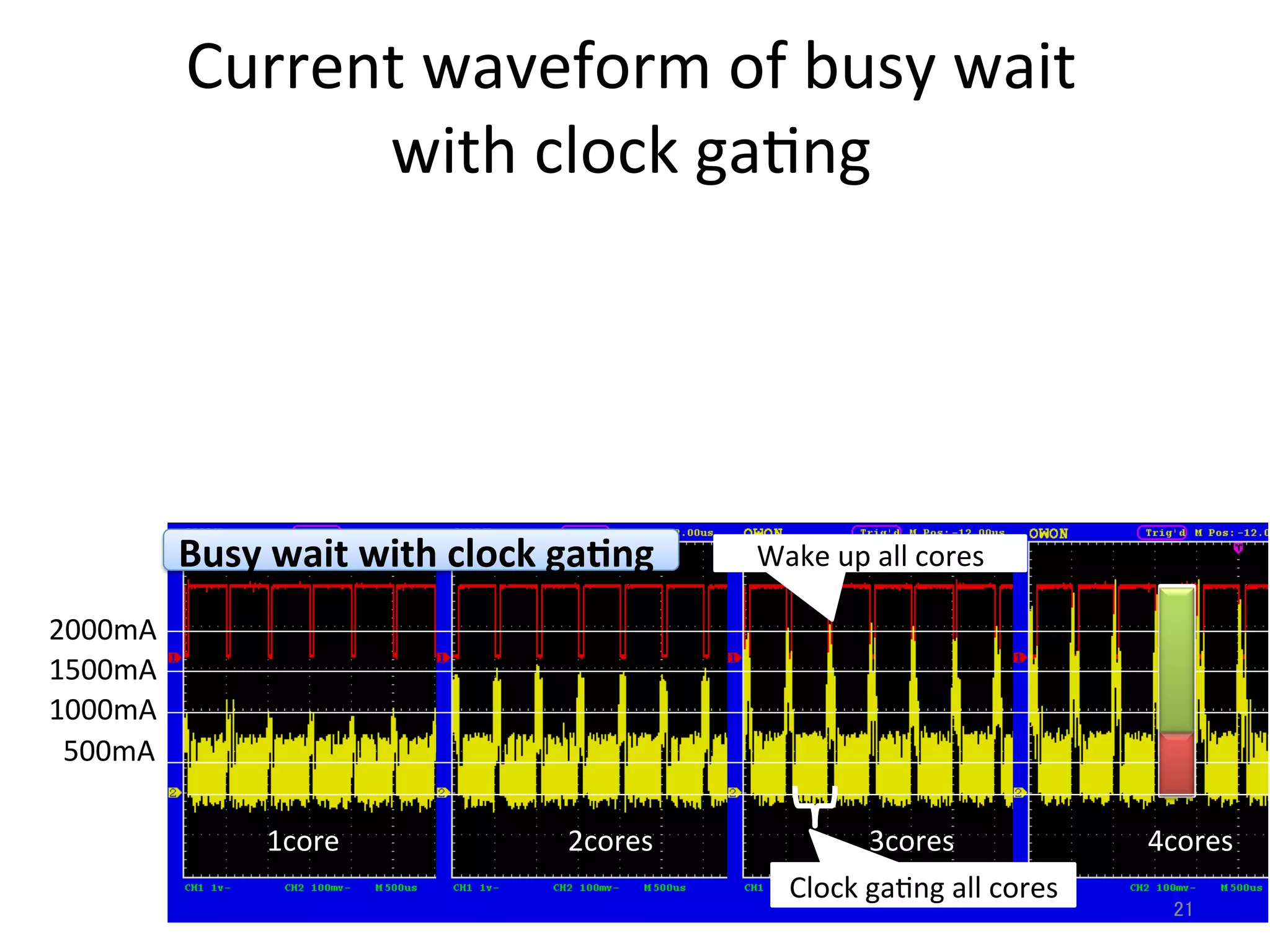
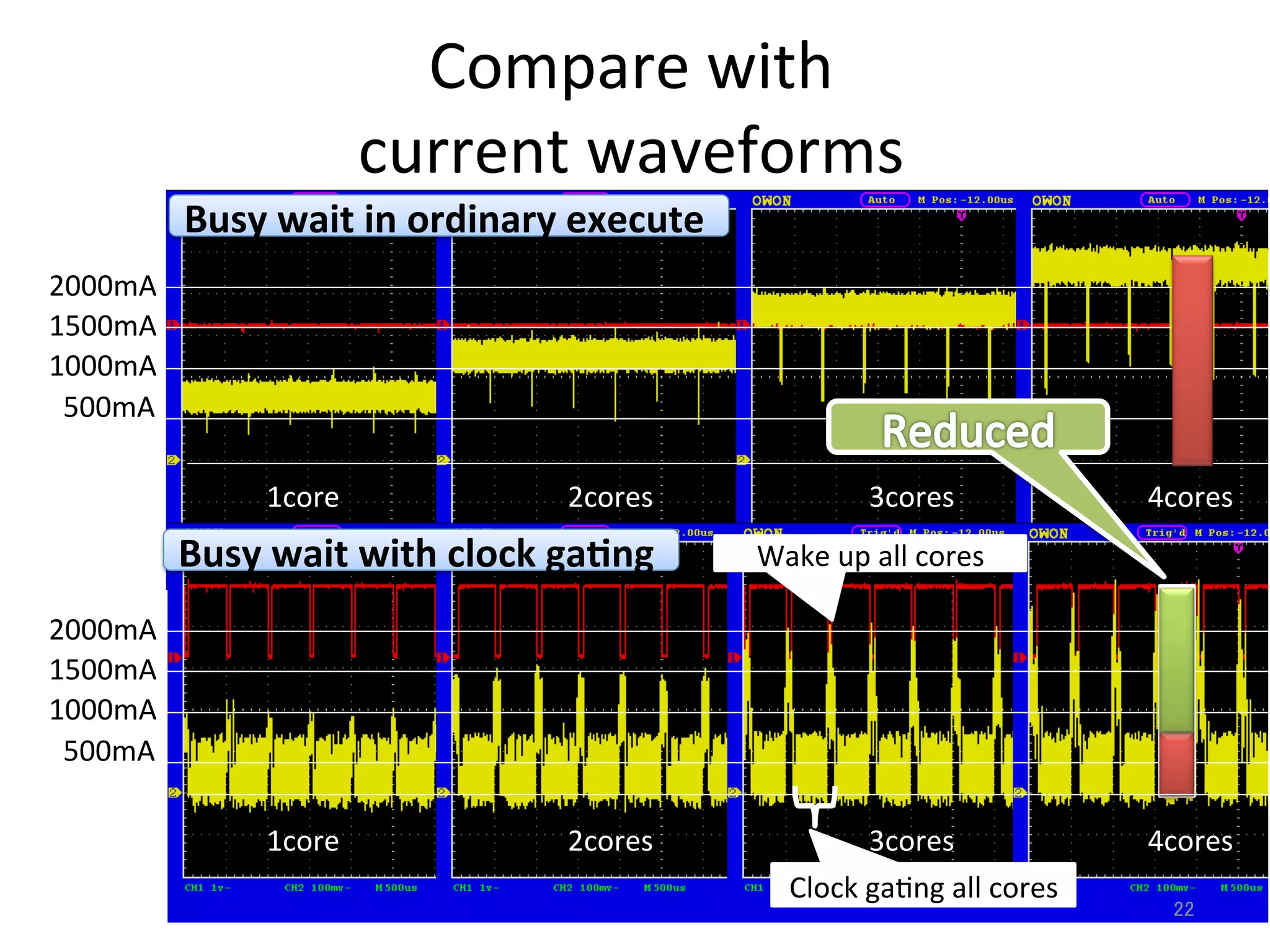
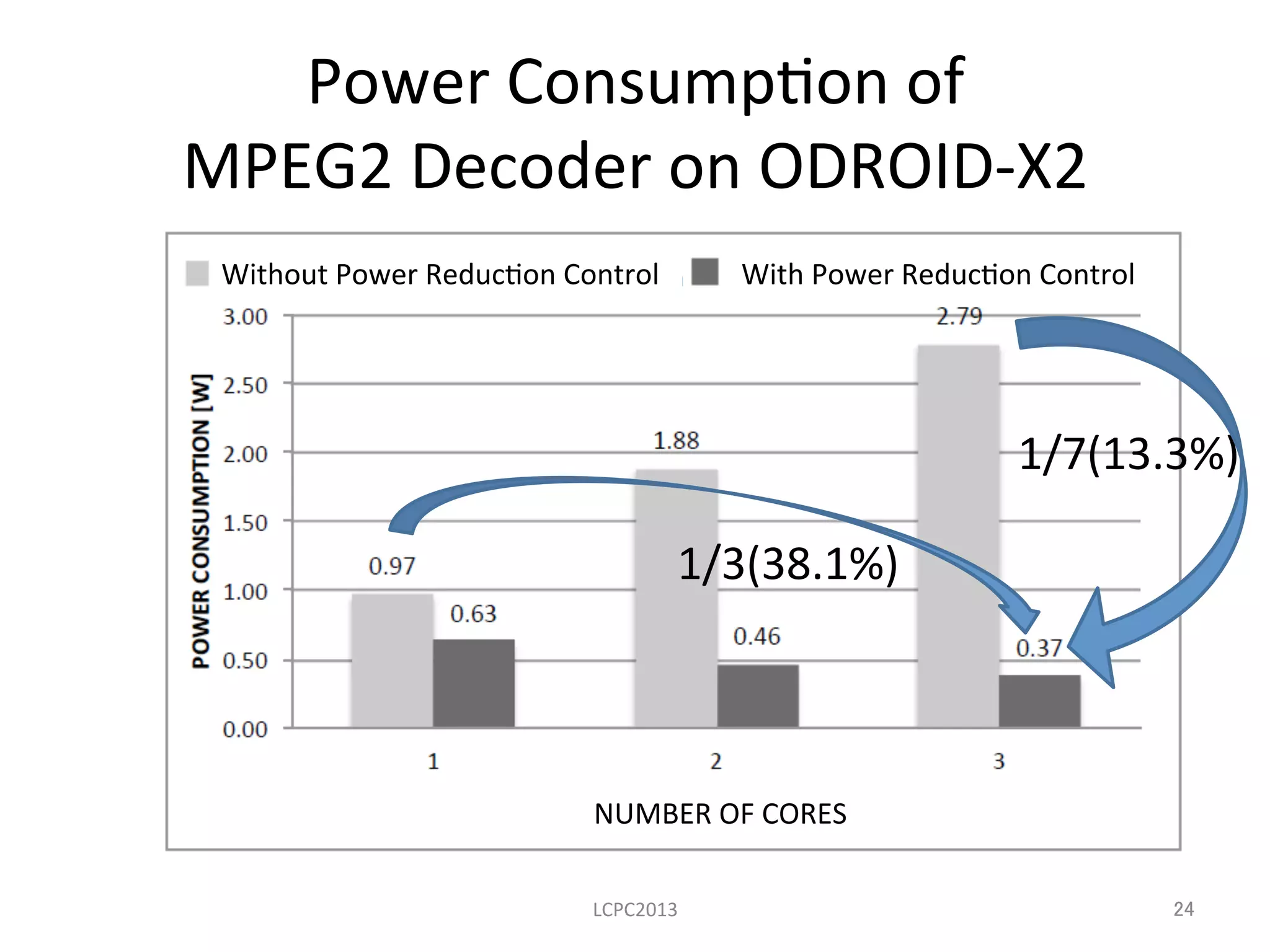
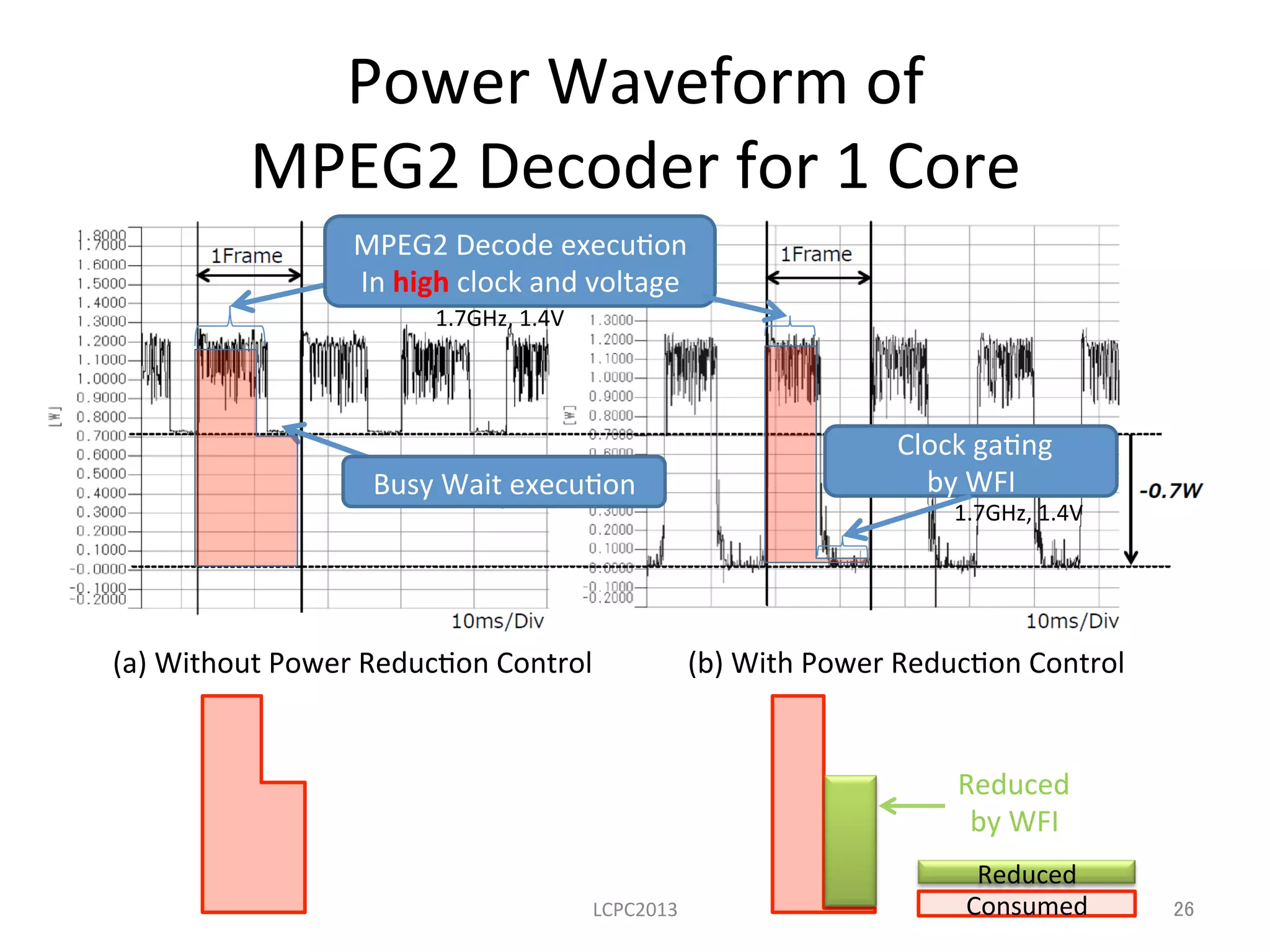
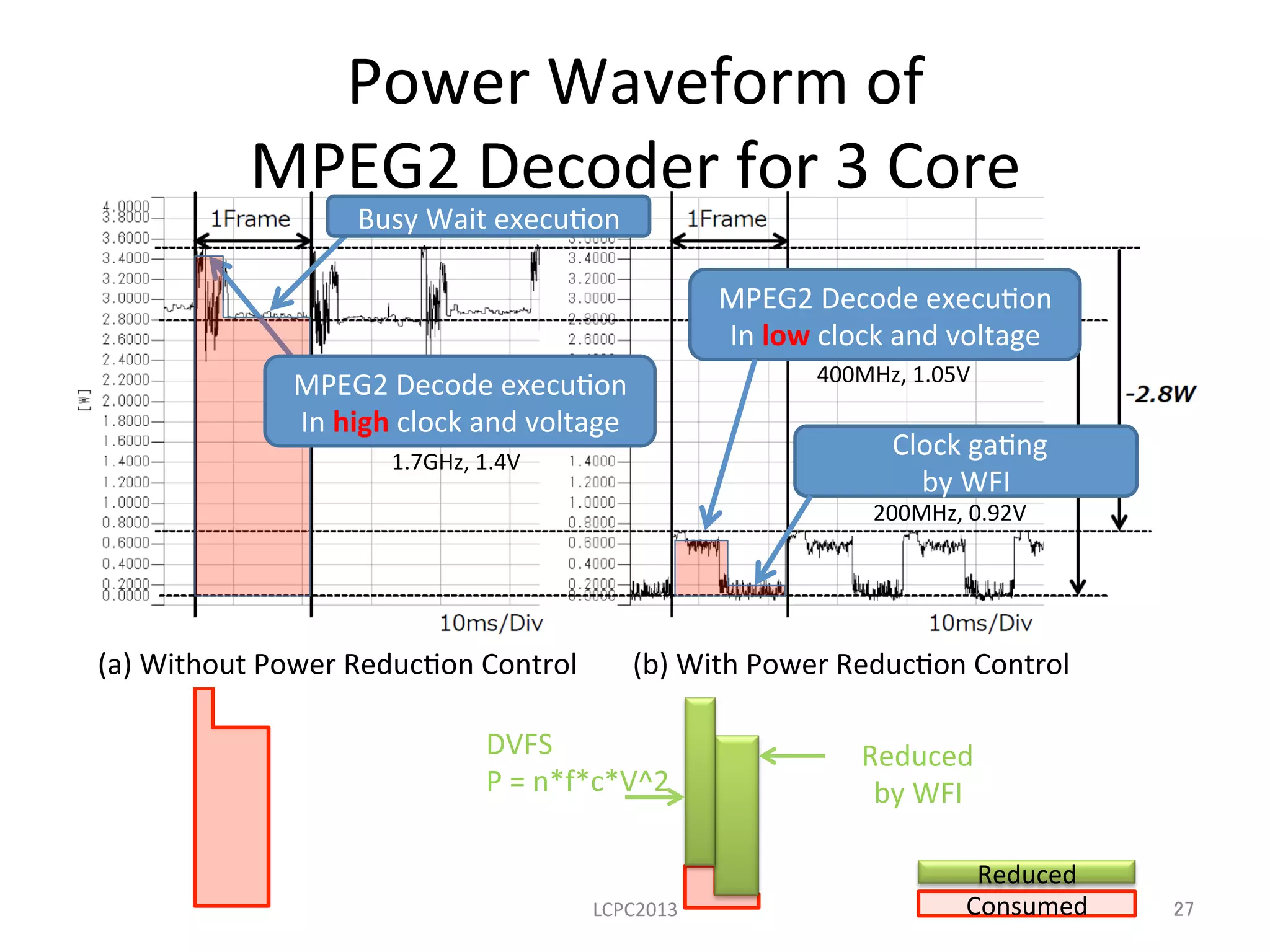
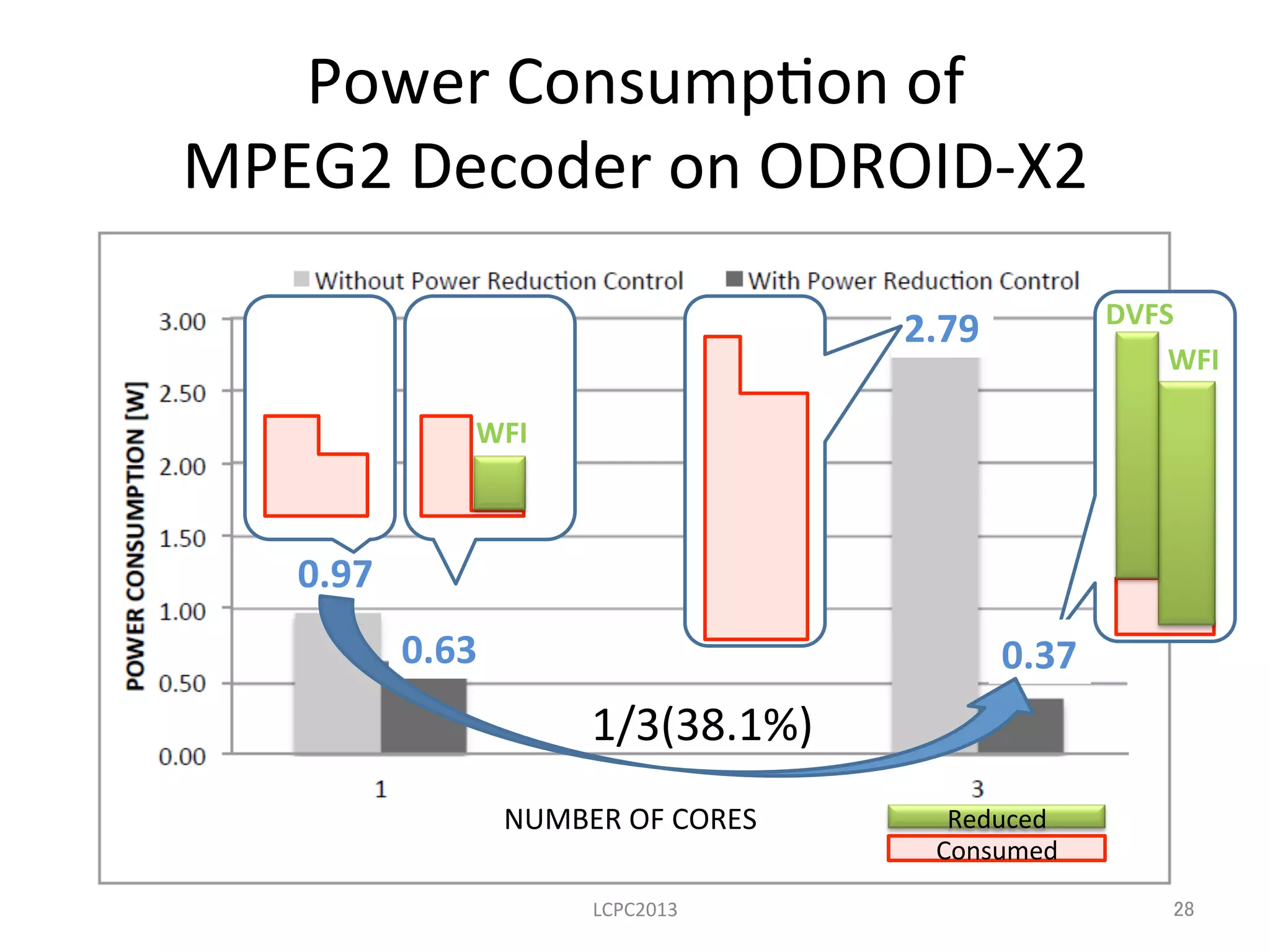
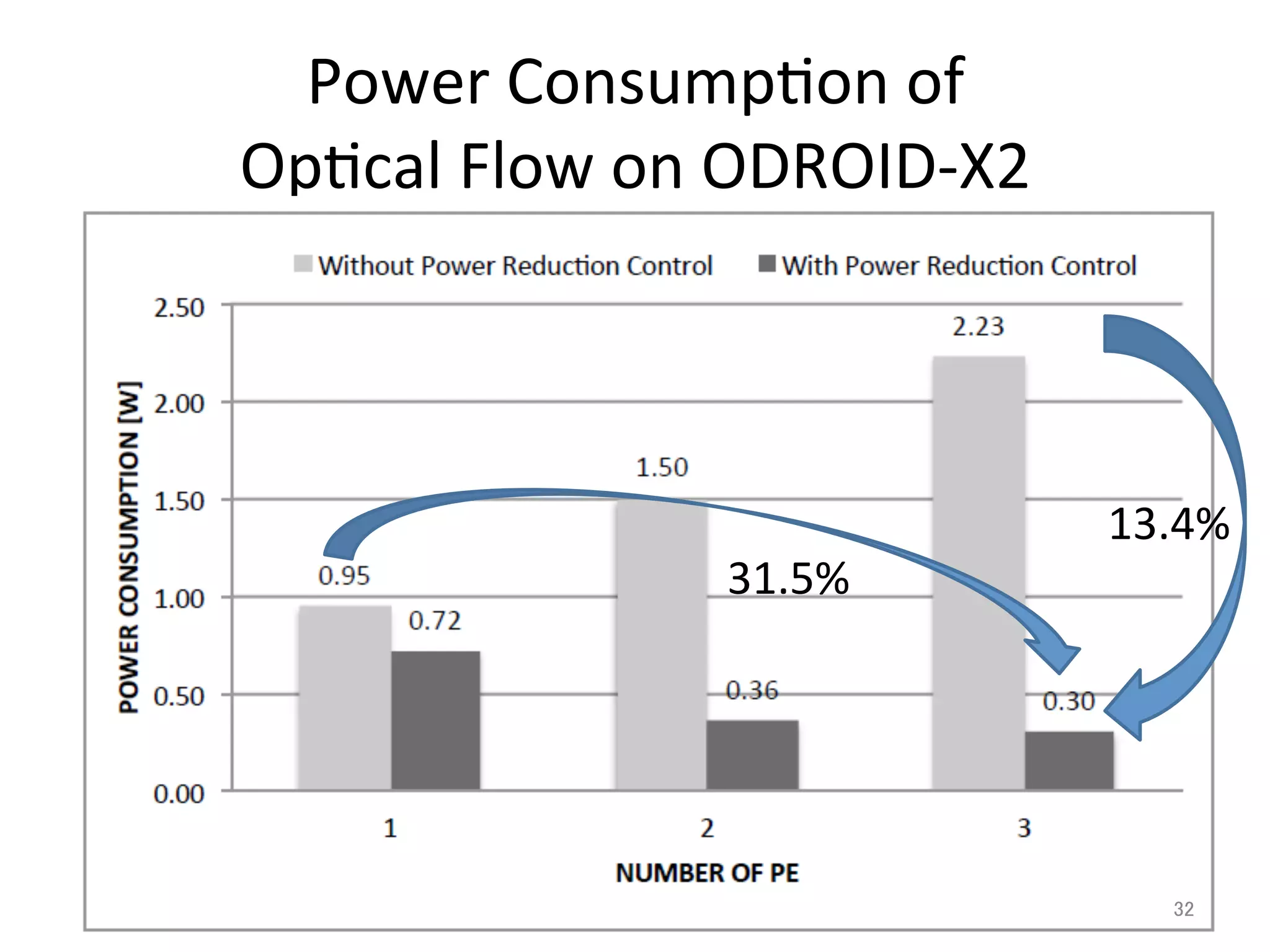
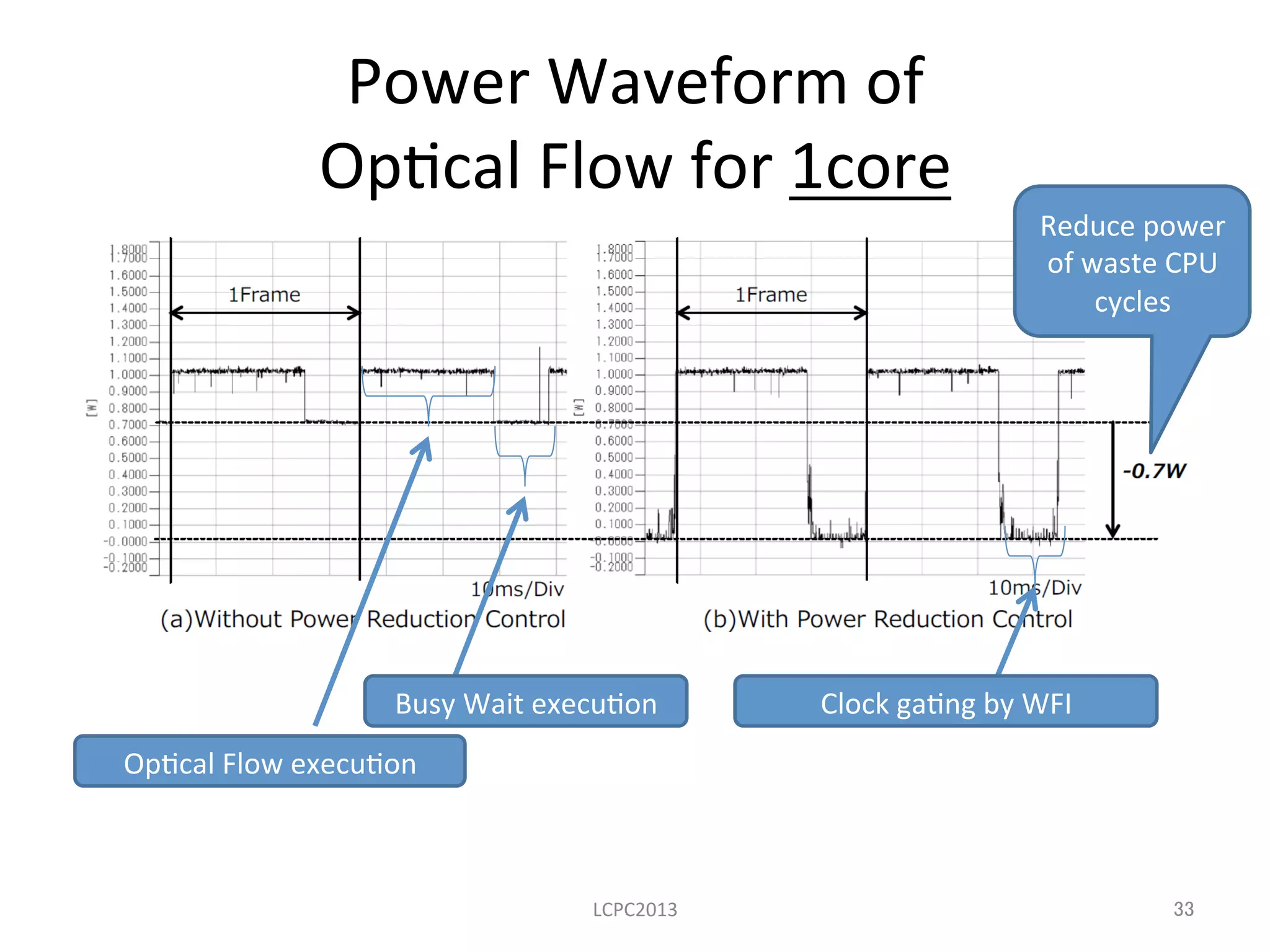
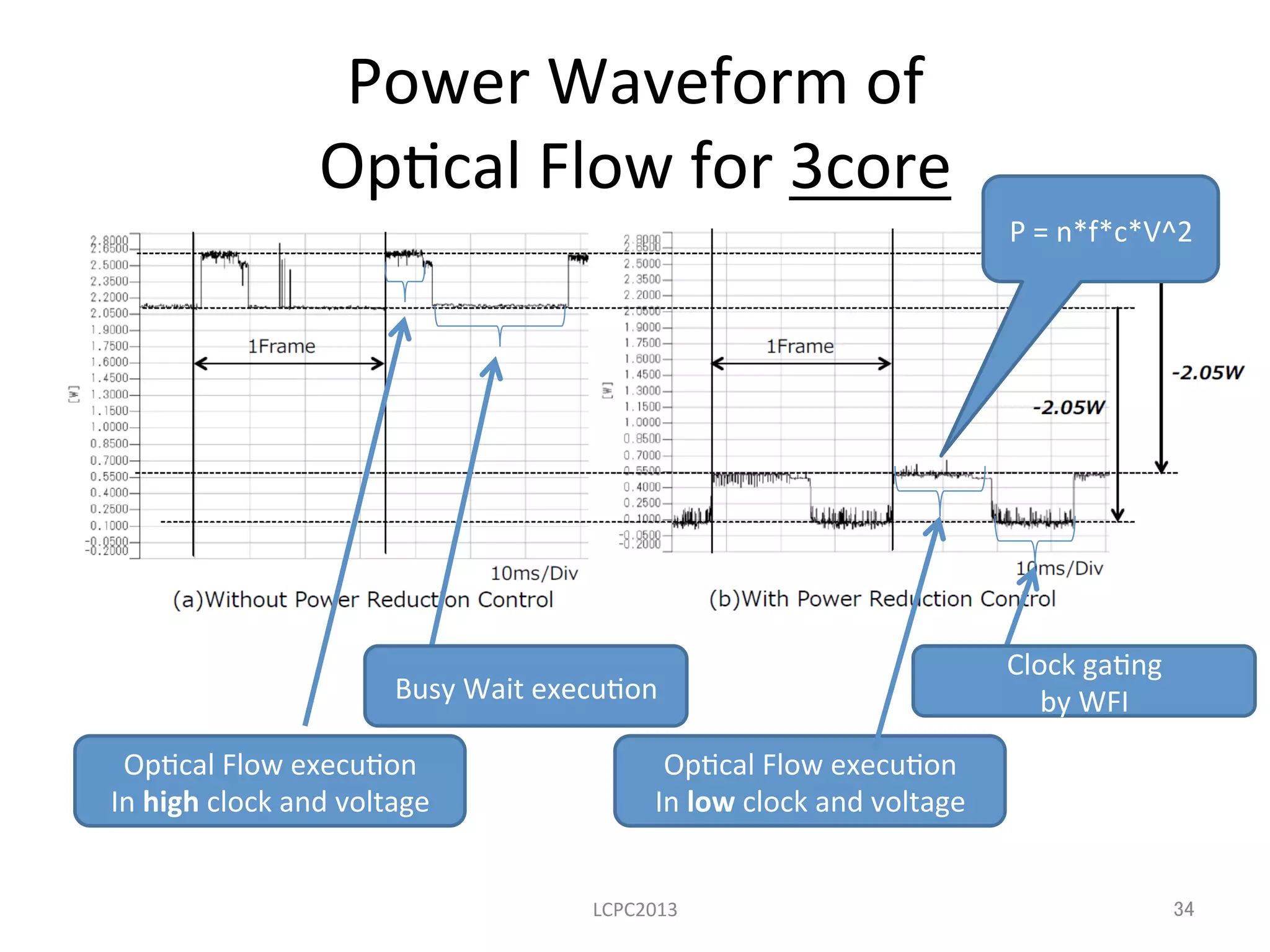
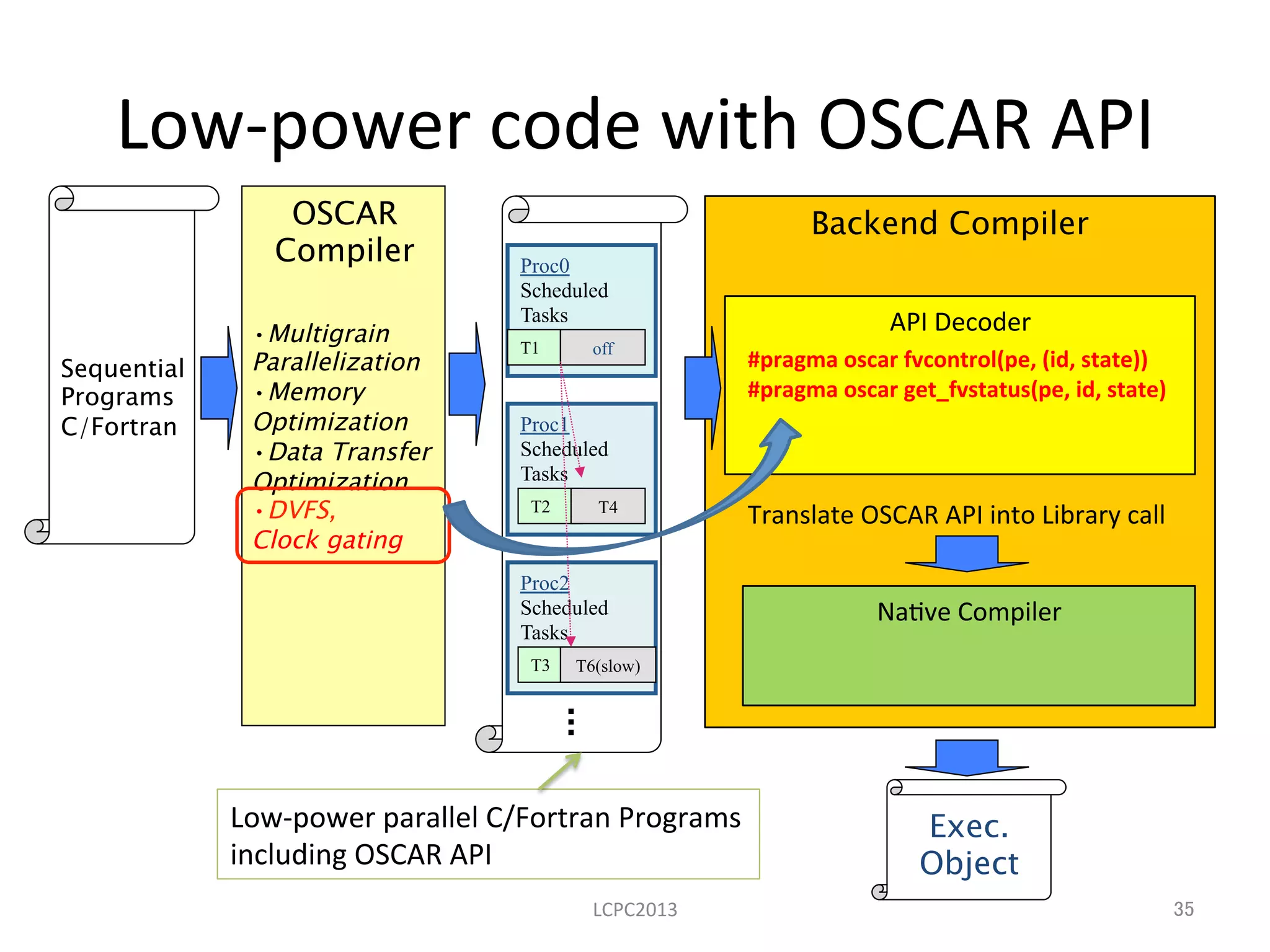
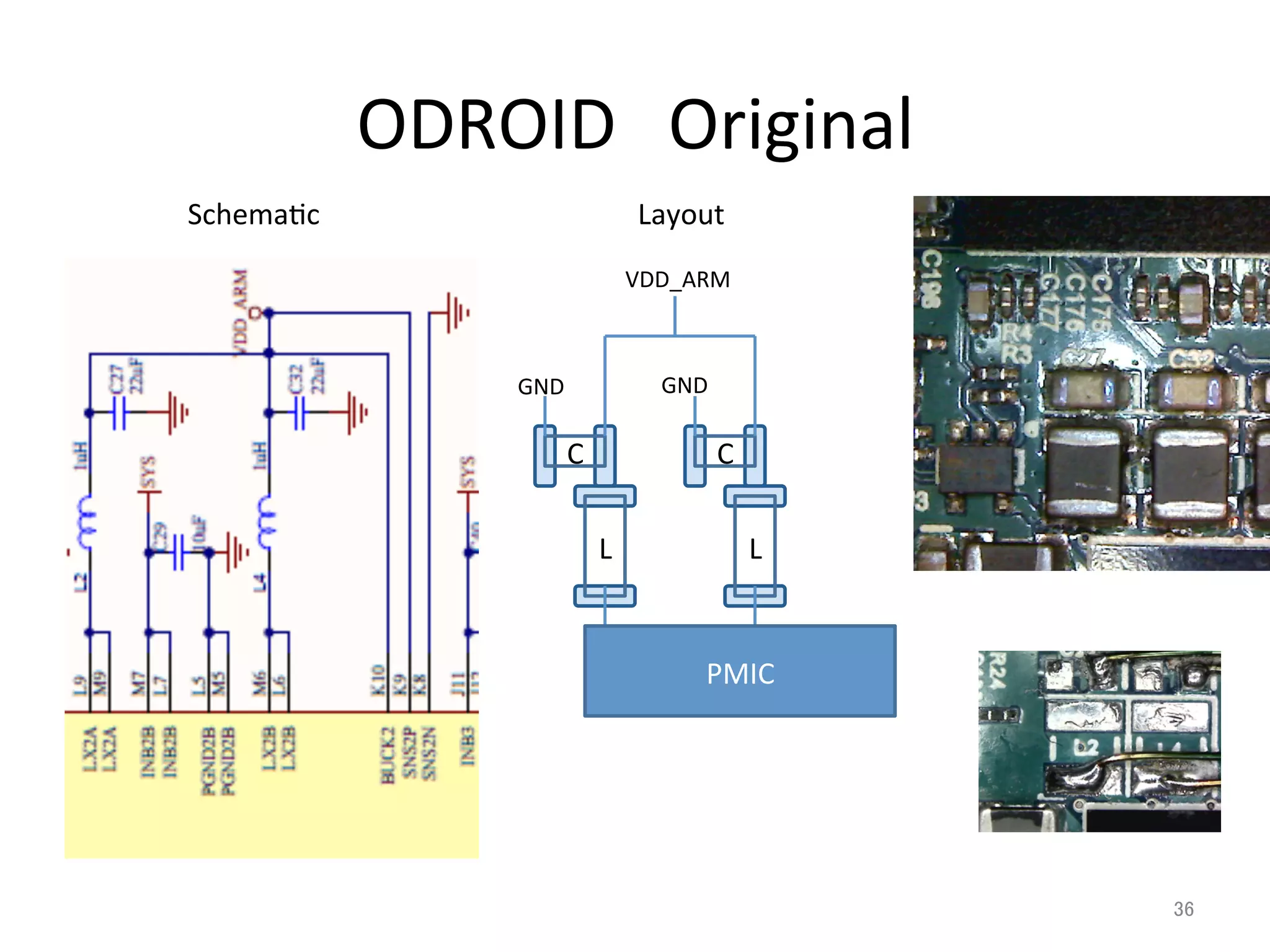
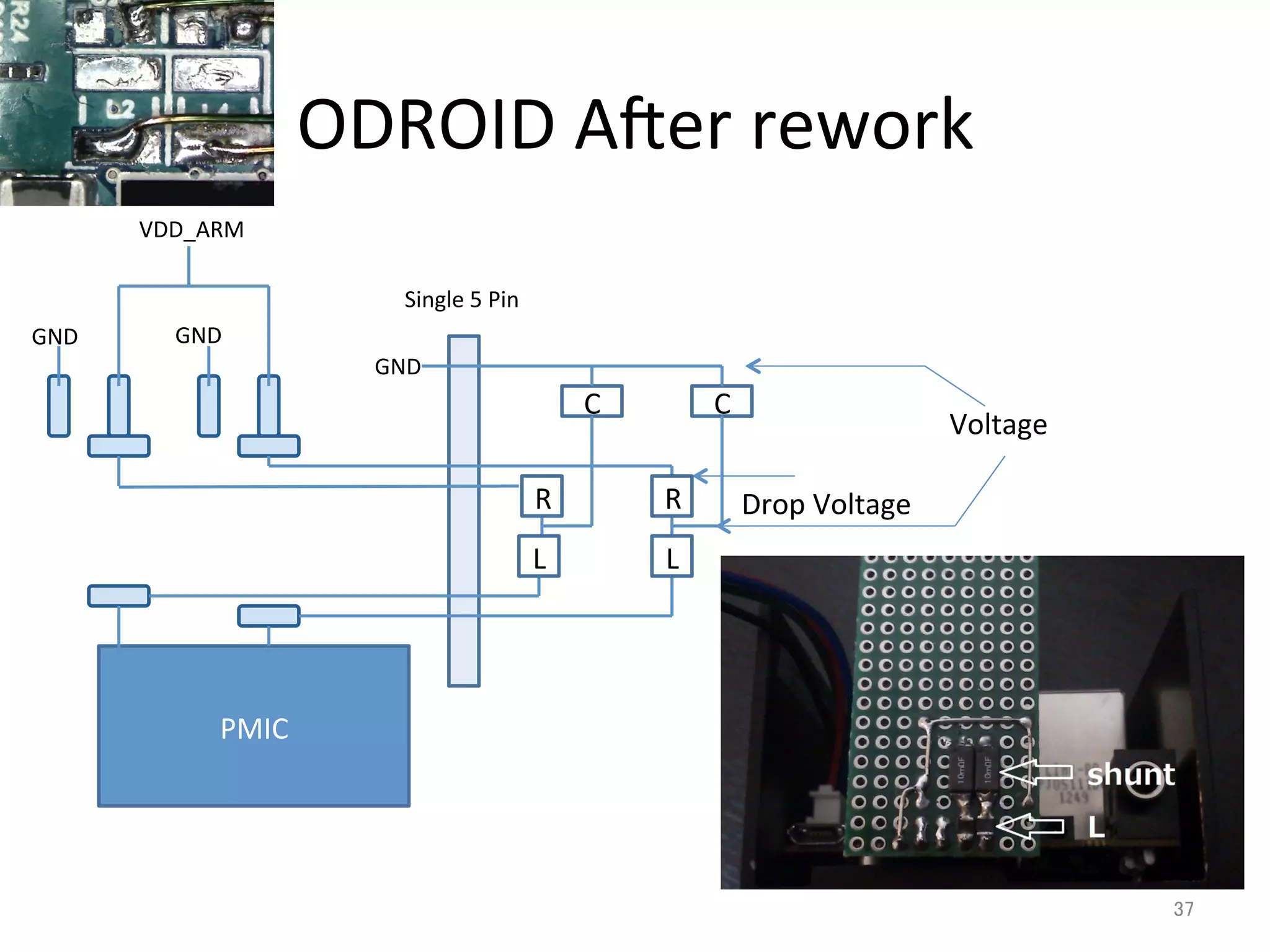

This document presents research on using compiler-controlled power reduction techniques on an Android platform with multiple cores. It discusses how the OSCAR compiler estimates execution times and schedules tasks to cores at different frequencies/voltages to meet deadlines while minimizing power. Experiments were conducted on an ODROID-X2 board with an Exynos4412 quad-core chip to evaluate parallelizing applications and applying dynamic voltage and frequency scaling, clock gating, and power gating through software to reduce power consumption.











![[嵌入式系統] MCS-51 實驗 - 使用 IAR (2)](https://cdn.slidesharecdn.com/ss_thumbnails/mcs51iarpart2-150613071717-lva1-app6891-thumbnail.jpg?width=640&height=640&fit=bounds)




![SMP Implementation for OpenBSD/sgi [Japanese Edition]](https://cdn.slidesharecdn.com/ss_thumbnails/cbugapr232010-100423110217-phpapp01-thumbnail.jpg?width=640&height=640&fit=bounds)





































































