This document discusses synchronization tools used to solve the critical section problem in operating systems. It begins with an overview and objectives, then describes the critical section problem and race conditions that can occur. It presents Peterson's solution and discusses how hardware support like mutex locks, semaphores, and monitors can provide synchronization. Memory barriers are introduced to address instruction reordering issues on modern architectures. The document evaluates different synchronization tools for low, moderate, and high contention scenarios.

![6.13 Silberschatz, Galvin and Gagne ©2018
Operating System Concepts – 10th Edition
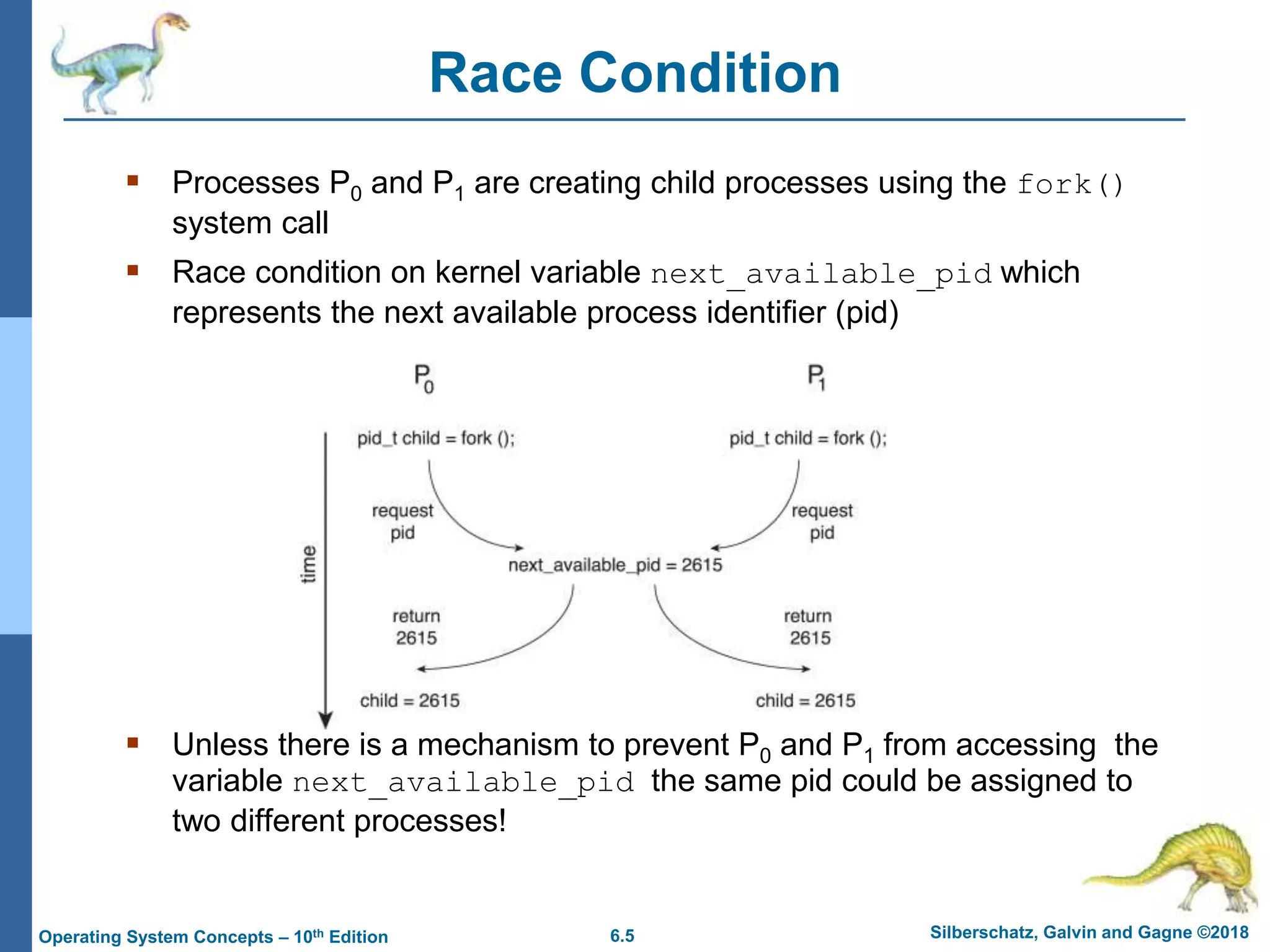
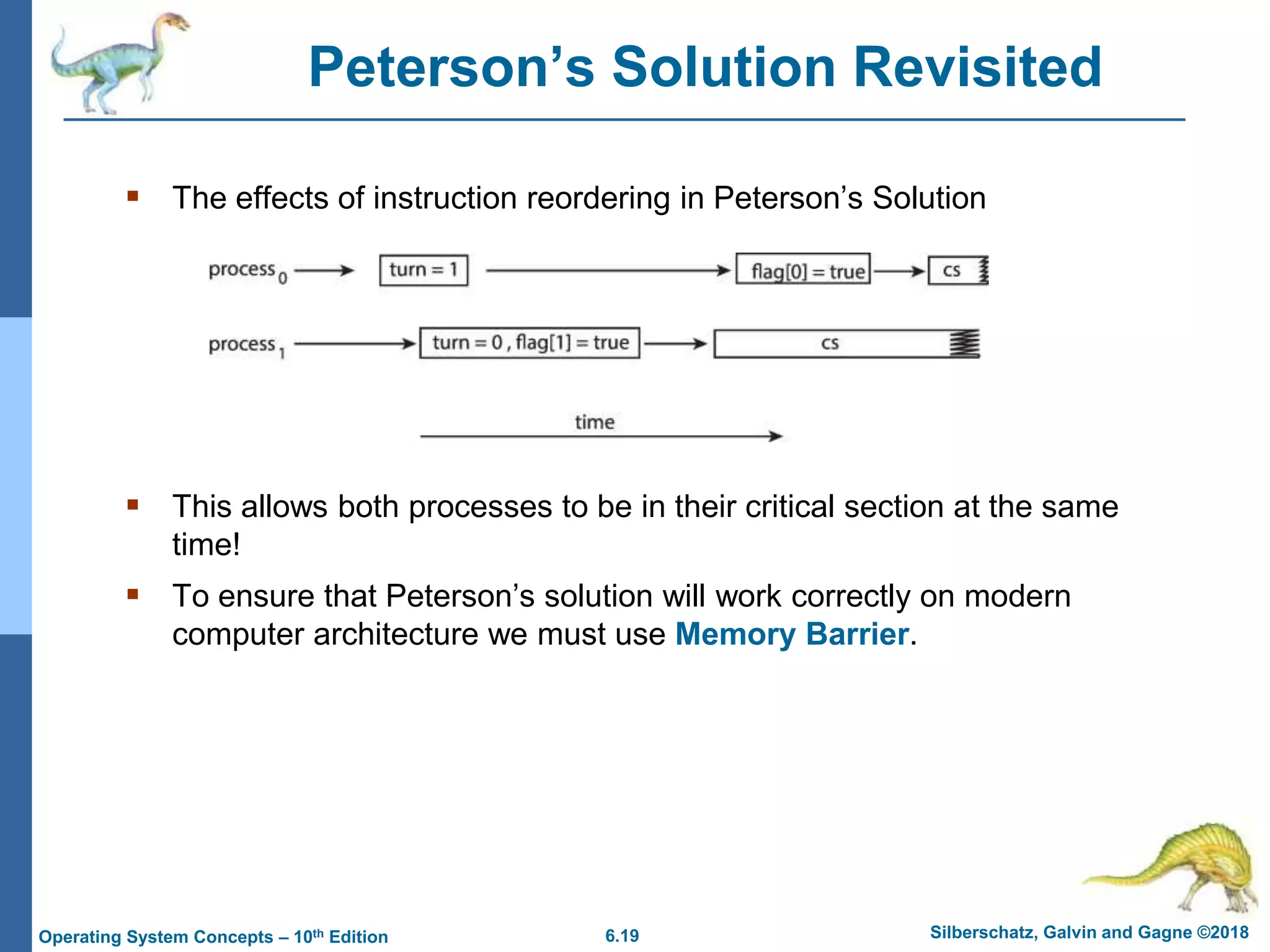
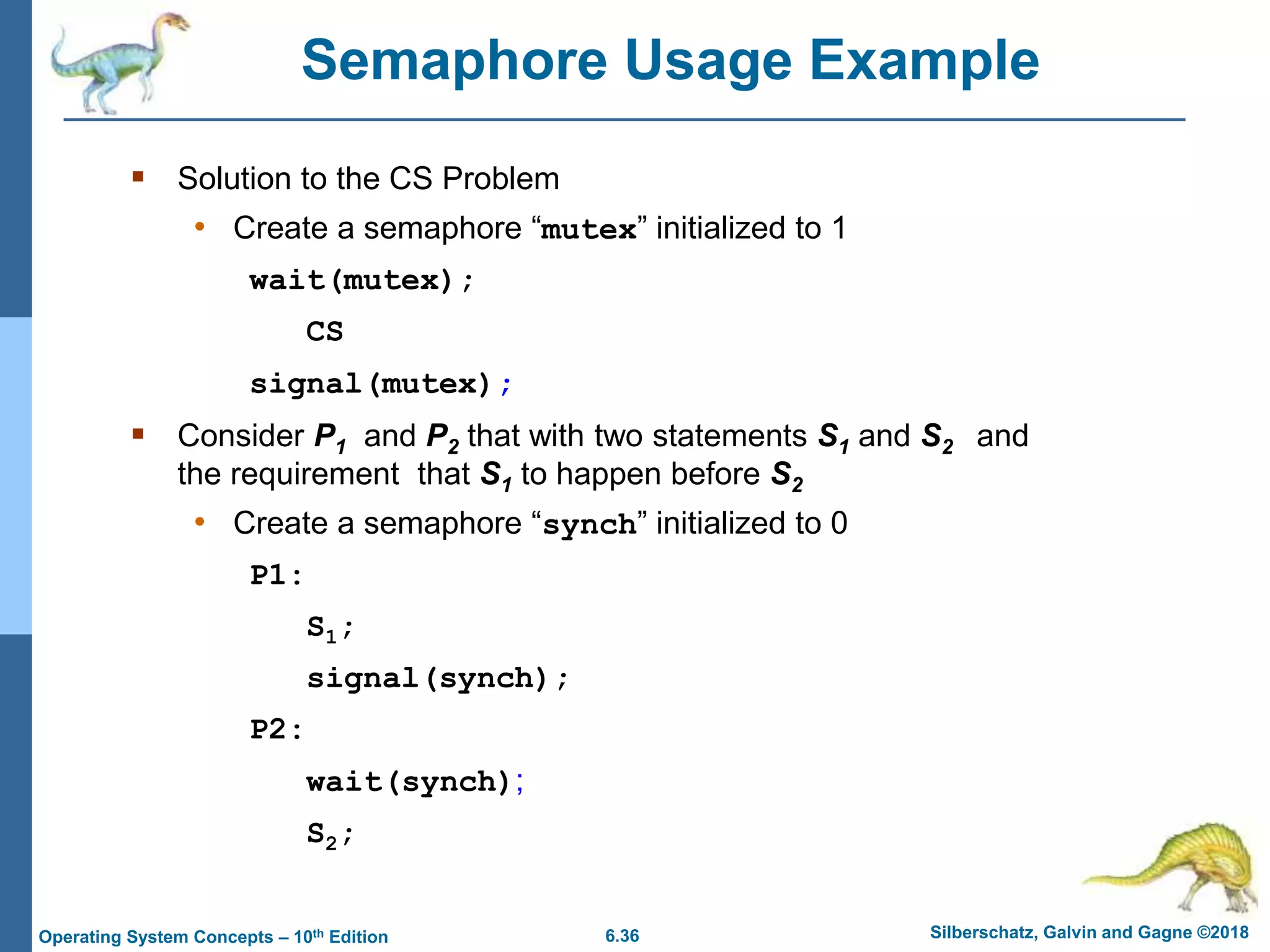
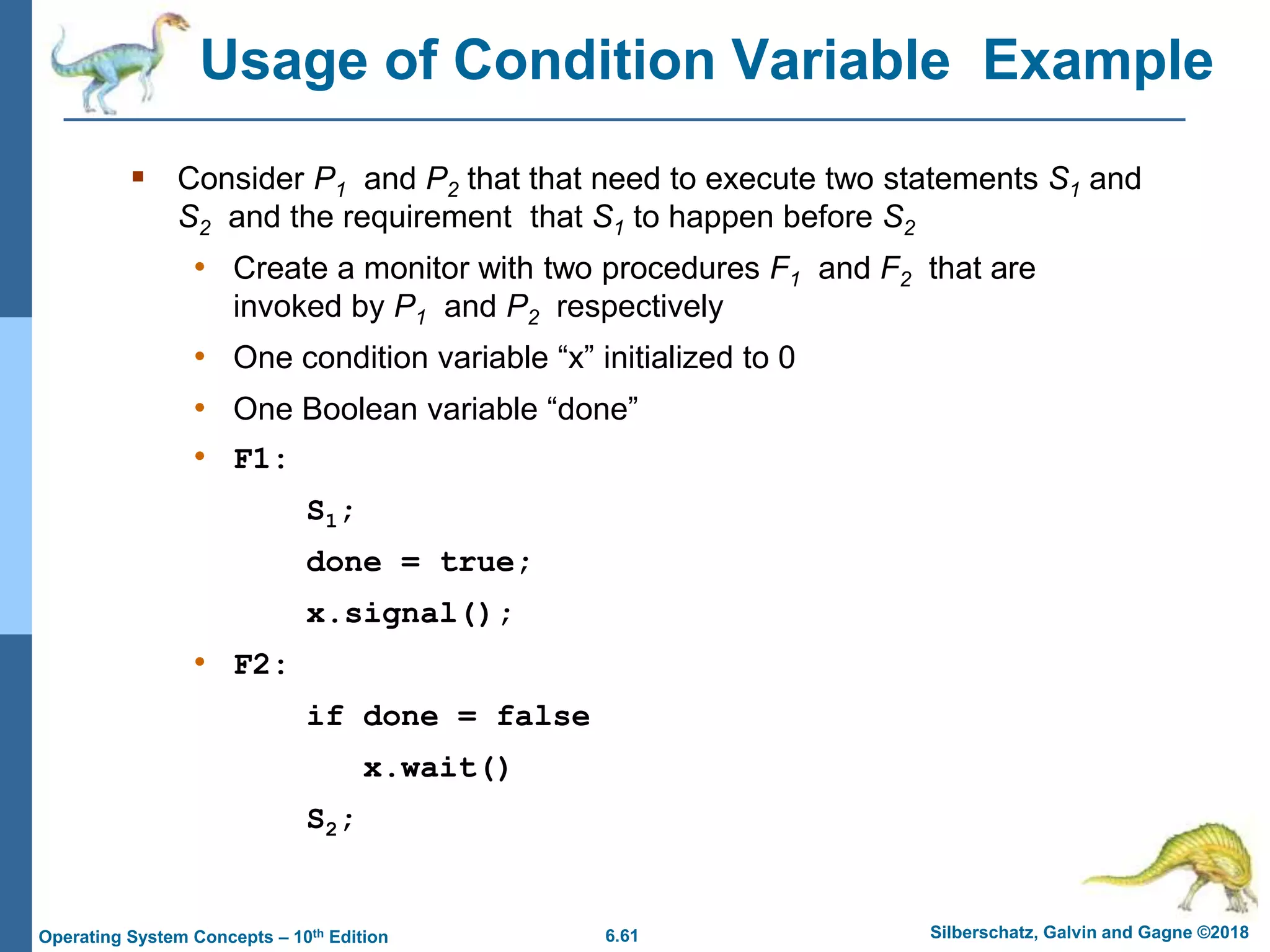
Peterson’s Solution
Two process solution
Assume that the load and store machine-language
instructions are atomic; that is, cannot be interrupted
The two processes share two variables:
• int turn;
• boolean flag[2]
The variable turn indicates whose turn it is to enter the
critical section
The flag array is used to indicate if a process is ready to
enter the critical section.
• flag[i] = true implies that process Pi is ready!](https://image.slidesharecdn.com/ch6-211227105121/75/Operating-Systems-Chapter-6-silberschatz-13-2048.jpg)
![6.14 Silberschatz, Galvin and Gagne ©2018
Operating System Concepts – 10th Edition
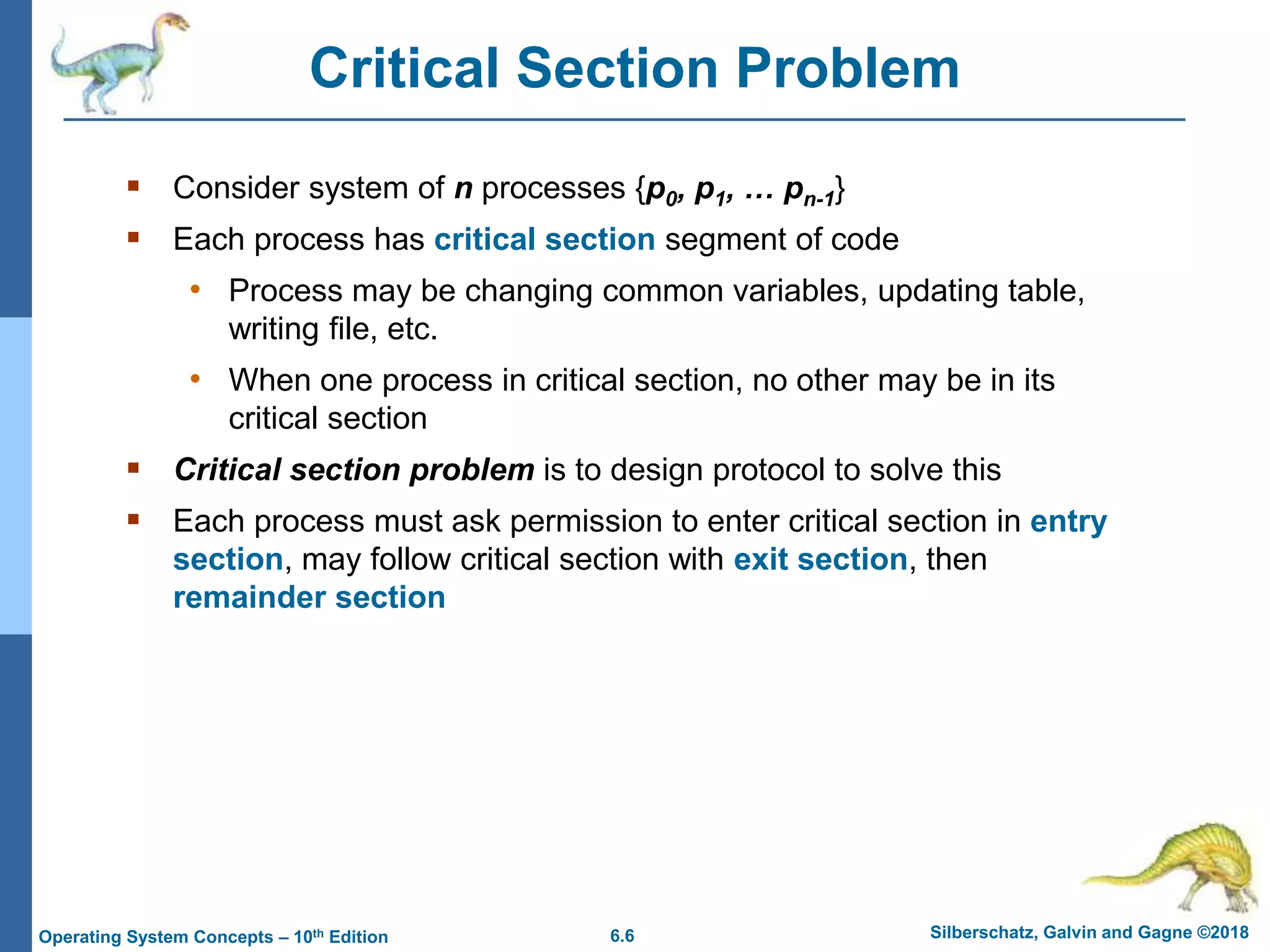
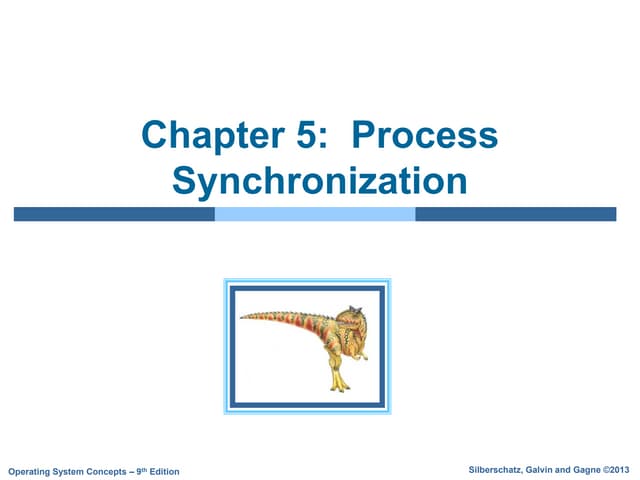
Algorithm for Process Pi
while (true){
flag[i] = true;
turn = j;
while (flag[j] && turn = = j)
;
/* critical section */
flag[i] = false;
/* remainder section */
}](https://image.slidesharecdn.com/ch6-211227105121/75/Operating-Systems-Chapter-6-silberschatz-14-2048.jpg)
![6.15 Silberschatz, Galvin and Gagne ©2018
Operating System Concepts – 10th Edition
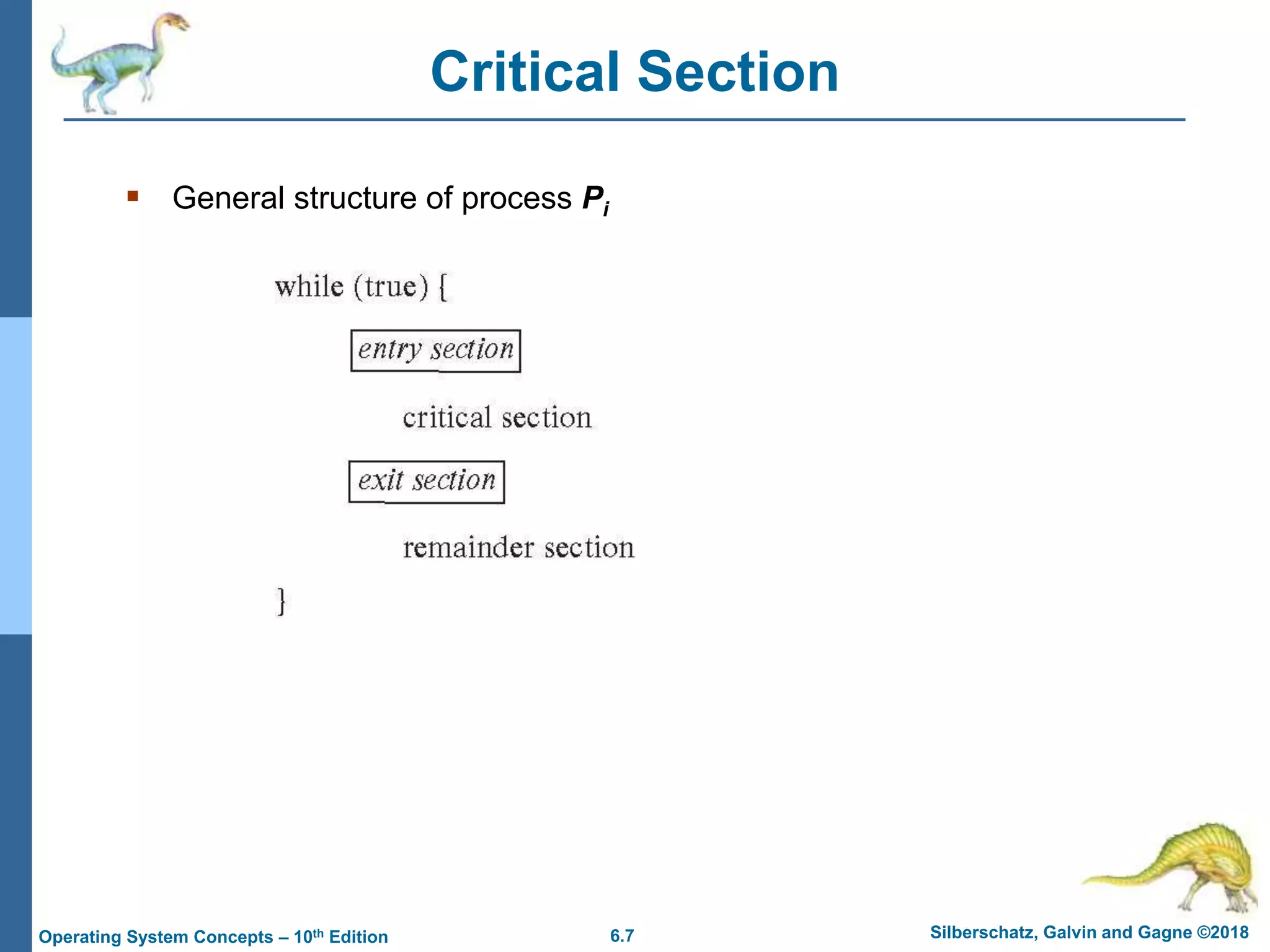
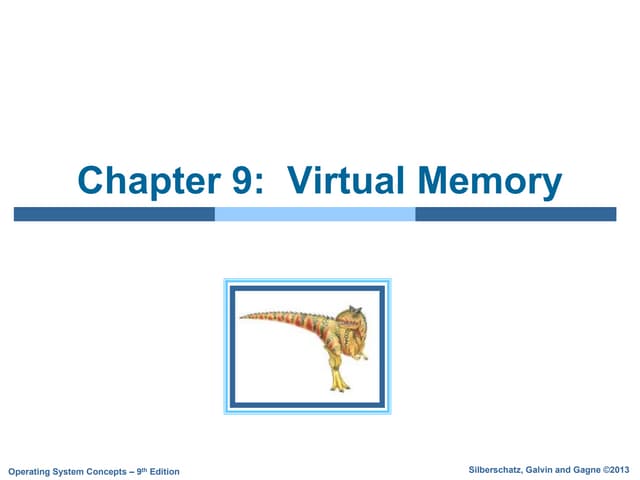
Correctness of Peterson’s Solution
Provable that the three CS requirement are met:
1. Mutual exclusion is preserved
Pi enters CS only if:
either flag[j] = false or turn = i
2. Progress requirement is satisfied
3. Bounded-waiting requirement is met](https://image.slidesharecdn.com/ch6-211227105121/75/Operating-Systems-Chapter-6-silberschatz-15-2048.jpg)


![6.29 Silberschatz, Galvin and Gagne ©2018
Operating System Concepts – 10th Edition
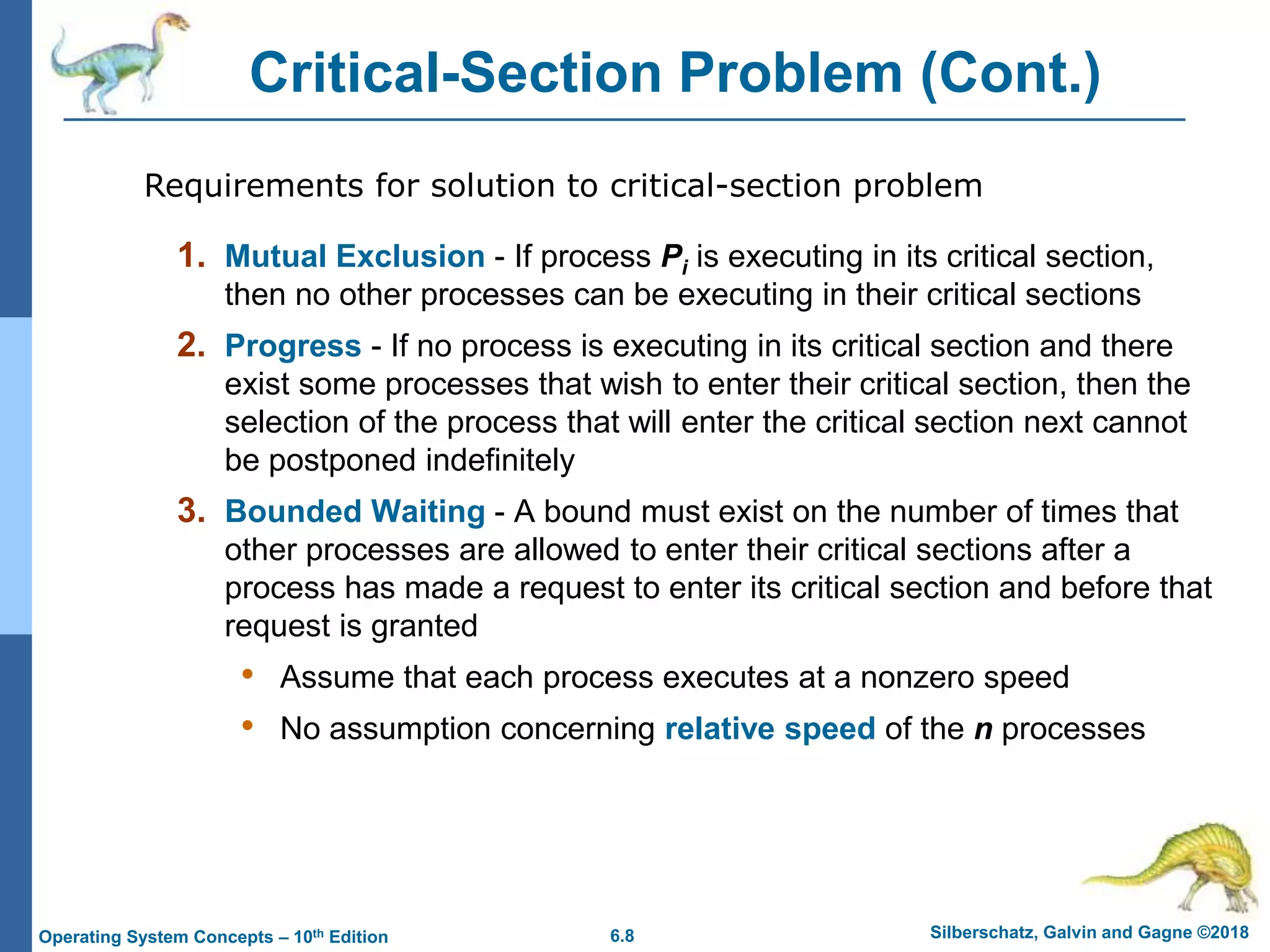
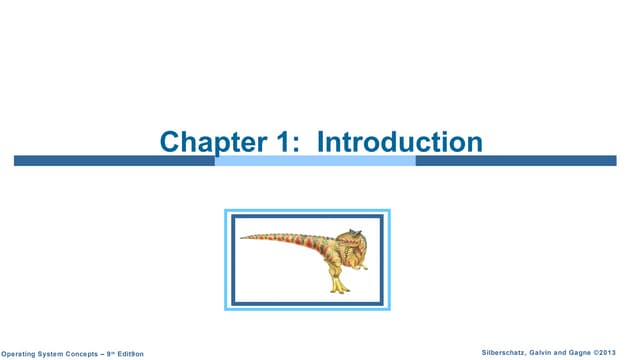
Bounded-waiting with compare-and-swap
while (true) {
waiting[i] = true;
key = 1;
while (waiting[i] && key == 1)
key = compare_and_swap(&lock,0,1);
waiting[i] = false;
/* critical section */
j = (i + 1) % n;
while ((j != i) && !waiting[j])
j = (j + 1) % n;
if (j == i)
lock = 0;
else
waiting[j] = false;
/* remainder section */
}](https://image.slidesharecdn.com/ch6-211227105121/75/Operating-Systems-Chapter-6-silberschatz-29-2048.jpg)








































![ch5 [Autosaved].ppt](https://cdn.slidesharecdn.com/ss_thumbnails/ch5autosaved-230604145932-d82b045b-thumbnail.jpg?width=640&height=640&fit=bounds)























