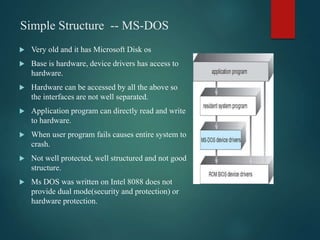
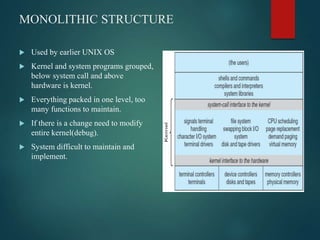
The document discusses various operating system structures including simple, monolithic, layered, microkernel, and modular approaches. It emphasizes the functionalities and challenges of each structure, particularly focusing on CPU scheduling techniques such as preemptive and non-preemptive scheduling, along with essential scheduling criteria like CPU utilization and response time. The microkernel model is highlighted for its ability to run services in user mode, reducing system crashes while introducing performance overhead.