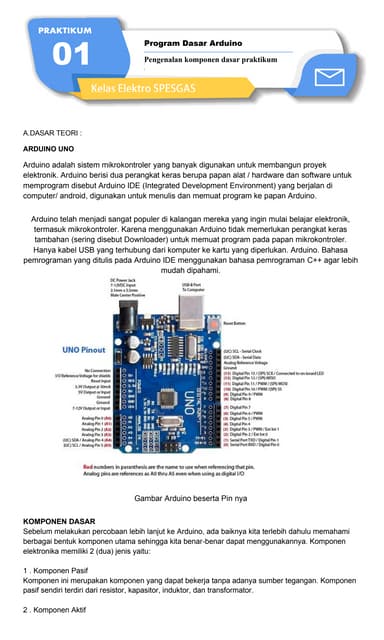
Dokumen ini membahas pengenalan tentang Arduino Uno sebagai mikrokontroler, perangkat lunak Arduino IDE untuk pemrograman, serta berbagai komponen seperti LED dan sensor inframerah dan ultrasonik. Arduino bersifat open-source, yang memungkinkan pengguna untuk melakukan eksperimen tanpa biaya perangkat lunak, dan mendukung berbagai proyek seperti pengendalian LED dan motor servo. Selain itu, juga dicontohkan aplikasi praktis melalui berbagai skenario pemrograman yang melibatkan sensor dan motor.