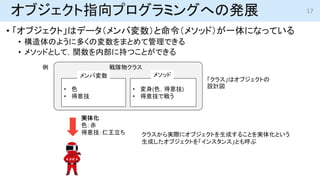
付録 | 基本構造①
•条件分岐(IF)
• 繰り返し(FOR)
22
disp(’Please input 1’)
x = input(prompt)
if x == 1
disp(’Thanks’)
else
disp(’Nooo! ’)
end
if 条件A
(条件Aに合致したときの処理)
else if 条件B
(条件Bに合致したときの処理)
else
(条件AにもBにも合致しないときの処理)
end
形式 例
for (変数)=(初項):(公差):(末項)
(繰り返す処理)
end
形式 NUM = 100;
x = zeros(NUM);
x(1) = 1;
x(2) = 1;
for i = 3:NUM
x(i) = x(i-1)+x(i-2);
end
例
公差は省略可能.
省略した場合,公差は自動的に1になる.
23.
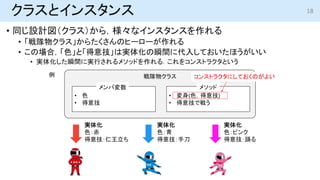
付録 | 基本構造②
•条件分岐(SWITCH)
• 繰り返し(WHILE)
23
disp(’Input 1,2,3,or 4’)
x = input(prompt)
switch x
case 1
disp(’You Win!’);
otherwise
disp(’You Lose... ’)
end
switch (変数)
case (値1)
(変数==値1のときの処理)
case (値2)
(変数==値2のときの処理)
otherwise
(どれにも当てはまらないときの処理)
end
形式 例
while (条件)
(条件を満たす間,繰り返す処理)
end
形式 x = 0;
while x < 100
x = x + 1;
end
例
24.
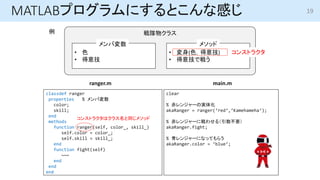
付録 | 論理演算子など
•等しい
• 等しくない
• 不等号
• AND(かつ)
• OR(または)
24
x == 1
x ~= 1
x < 1 x > 1
x <= 1 x >= 1
x == 1 && y ==2
x == 1 || y ==2
AND
OR
x != 1 とする言語もあるので注意
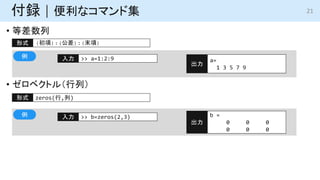
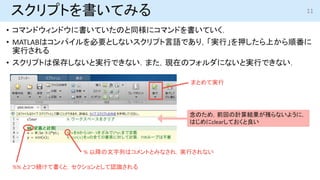
![行列計算をしてみる | ベクトルと行列の定義
• MATLABは行列計算に強いので,いろいろ遊んでみよう.
1. ベクトルの計算
1. と入力すると,横ベクトル𝑝 = [1 2 3]が生成される.
2. と入力すると,縦ベクトル𝑞 =
1
2
3
が生成される.
2. 行列の定義
1. と入力すると,行列𝐴 =
1 2
3 4
が生成される.
>> A=[1 2; 3 4]
>> p=[1 2 3]
>> q=[1 2 3]’
転置を意味する
改行を意味する
6
>> q=[1; 2; 3]
TRY と入力するとどうなるだろうか.](https://image.slidesharecdn.com/matlab2021-211018032943/85/Matlab-2021-6-320.jpg)
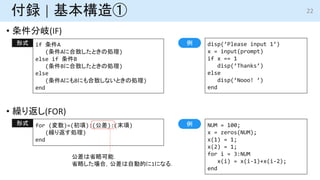
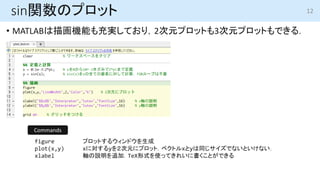
![準備: 行列𝐵を定義しておきます.
行列計算をしてみる | 行列の演算
1. 行列の掛け算
1. スカラーと行列の掛け算は, と書ける.
2. 行列と行列の掛け算は, と書ける.
2. 逆行列は, で簡単に求められる.
3. 固有値と固有ベクトルは, で求められる.
Vは固有ベクトルからなる正方行列で,各列が固有ベクトル.
Dは固有値を対角に持つ対角行列.
>> a*A
>> [V,D]=eig(A)
>> inv(A)
>> B = [3 4; 5 6]
>> A*B
練習問題
行列 𝑄 =
0 1 1
−4 4 2
2 −1 1
を対角化せよ.
7](https://image.slidesharecdn.com/matlab2021-211018032943/85/Matlab-2021-7-320.jpg)
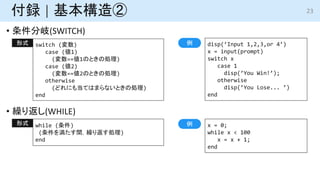
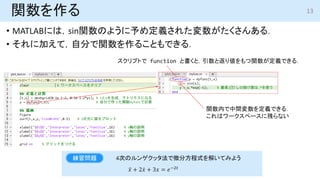
![1. スカラーとベクトルの掛け算は, と書ける.
2. ベクトルの積を計算してみよう.
1. 二つの縦ベクトル を定義する.
2. ベクトル𝑢と𝑣の内積は,
3. ベクトル𝑢と𝑣の外積は,
行列計算をしてみる | ベクトルの演算
>> a*p
>> u=[2;3;4] >> v=[5;6;7]
>> dot(u,v)
>> cross(u,v)
ベクトル𝑢と𝑣の内積は,𝑢 ∙ 𝑣 = 𝑢⊤𝑣で求められる.すなわち,
でも計算できる.
>> u’*v
8](https://image.slidesharecdn.com/matlab2021-211018032943/85/Matlab-2021-8-320.jpg)
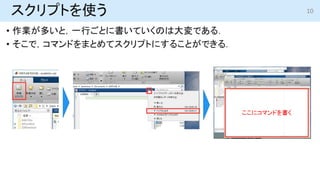
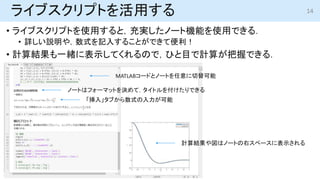
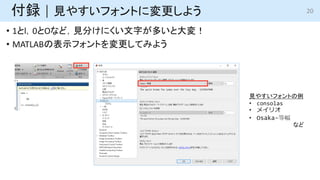
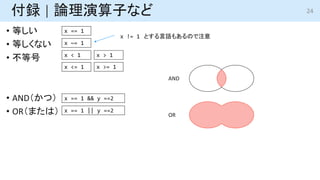
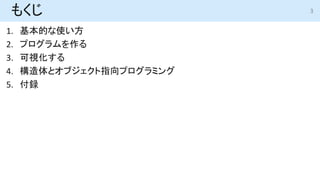
![構造体でプログラムをシンプルに書く
• 関数の引数が長いと書くのが大変
• 「構造体」を使ってまとめてしまえば,簡単に書き表せる
dx = F (t, x, m1, m2, J1, J2, l1, l2, d1, d2, g);
param.m1 = 1.0;
param.m2 = 1.0;
param.J1 = 1.5;
param.J2 = 1.5;
param.l1 = 1.0;
param.l2 = 1.0;
param.d1 = 0.5;
param.d2 = 0.5;
param.g = 9.8;
dx = F (t, x, param);
‘param’ という構造体の中に,
たくさんの変数が存在する
「構造体名.変数名」というフォーマット
(.の後に変数名を書く)
‘param’ だけ引いてしまえば,
中身の変数が全部ついてくる
param = [1.0 1.0 1.5 1.5 1.0 1.0 0.5 0.5 9.8]
とするよりも,各変数の意味がわかりやすい
16](https://image.slidesharecdn.com/matlab2021-211018032943/85/Matlab-2021-16-320.jpg)