This document provides an overview of Karnaugh maps (K-maps) for simplifying Boolean functions in digital circuit design, including techniques for 2 to 5-variable K-maps and their advantages and limitations. It emphasizes the benefits of simplification, such as reduced complexity and improved circuit performance, and discusses systematic methods for obtaining simplified expressions. Additionally, it illustrates the grouping method in K-maps to minimize product terms effectively.

![K-Map Introduction [1,2]
• Complexity of digital logic gates that implement a Boolean function is directly related
to the complexity of Boolean expression from which the function is implemented.
• Simplification of Boolean functions leads to simpler (and usually faster) digital
circuits.
• Simplifying Boolean functions using identities is time-consuming and error-prone.
• The map method provides a simple procedure for minimizing Boolean functions.](https://image.slidesharecdn.com/gweljmprr2gaa6xpmiob-lecture08-kmap-intro-250114145900-d2ef5261/85/Lecture08_Karnaug_hmaps_introduction-pdf-3-320.jpg)
![Function Simplification[1,2]
▪ Why simplify?
❖ Simpler expression uses less logic gates.
❖ Thus: cheaper, less power, faster.
▪ Simplification techniques:
❖ Algebraic Simplification.
➢ simplify symbolically using theorems/postulates.
➢ requires skill but extremely open-ended.
❖ Karnaugh Maps.
➢ diagrammatic technique
➢ easy for humans (pattern-matching skills).
➢ simplified standard forms.
➢ limited to not more than 6 variables.](https://image.slidesharecdn.com/gweljmprr2gaa6xpmiob-lecture08-kmap-intro-250114145900-d2ef5261/85/Lecture08_Karnaug_hmaps_introduction-pdf-4-320.jpg)
![Algebraic Simplification[1,2]
▪ Algebraic simplification aims to minimise
(i) number of literals, and
(ii) number of terms](https://image.slidesharecdn.com/gweljmprr2gaa6xpmiob-lecture08-kmap-intro-250114145900-d2ef5261/85/Lecture08_Karnaug_hmaps_introduction-pdf-5-320.jpg)
![Introduction to K-maps[1,2]
▪ Systematic method to obtain simplified sum-of-products (SOPs) Boolean
expressions.
▪ Objective: Fewest possible terms/literals.
▪ Diagrammatic technique
▪ Advantage: Easy with visual aid.
▪ Disadvantage: Limited to 5 or 6 variables.](https://image.slidesharecdn.com/gweljmprr2gaa6xpmiob-lecture08-kmap-intro-250114145900-d2ef5261/85/Lecture08_Karnaug_hmaps_introduction-pdf-7-320.jpg)
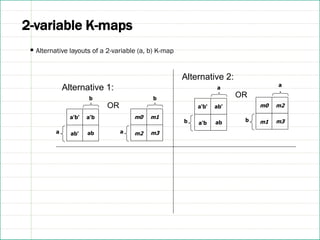
![2-variable K-maps[1]
▪ Karnaugh-map (K-map) is an abstract form of Venn diagram, organised as
a matrix of squares, where
❖each square represents a minterm
❖adjacent squares always differ by just one literal (so that the unifying
theorem may apply: a + a' = 1)
▪ For 2-variable case (e.g.: variables a,b), the map can be drawn as:](https://image.slidesharecdn.com/gweljmprr2gaa6xpmiob-lecture08-kmap-intro-250114145900-d2ef5261/85/Lecture08_Karnaug_hmaps_introduction-pdf-8-320.jpg)
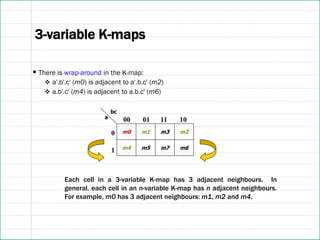
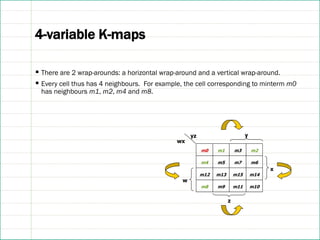
![3-variable K-maps[1,2]
▪ There are 8 minterms for 3 variables (a, b, c). Therefore, there are 8 cells in a 3-variable
K-map.
ab'c' ab'c
a
b
abc abc'
a'b'c' a'b'c a'bc a'bc'
0
1
00 01 11 10
c
a
bc
OR
m4 m5
a
b
m7 m6
m0 m1 m3 m2
0
1
00 01 11 10
c
a
bc
Note Gray code sequence
Above arrangement ensures that minterms of
adjacent cells differ by only ONE literal. (Other
arrangements which satisfy this criterion may also
be used.)](https://image.slidesharecdn.com/gweljmprr2gaa6xpmiob-lecture08-kmap-intro-250114145900-d2ef5261/85/Lecture08_Karnaug_hmaps_introduction-pdf-11-320.jpg)
![References
[1]. M. M. Mano, Digital logic and computer design, 5th ed., Pearson Prentice Hall, 2013.
[2]. M. M. Mano and M. D. Ciletti, Digital design, 5th ed., Pearson Prentice Hall, 2013.](https://image.slidesharecdn.com/gweljmprr2gaa6xpmiob-lecture08-kmap-intro-250114145900-d2ef5261/85/Lecture08_Karnaug_hmaps_introduction-pdf-26-320.jpg)