Download as PDF, PPTX
![Elementary Optimal Problems
Elementary Flow Problem: Elementary Potential Problem:
min dT x + p max b T u − (c T y + q)
s. t. c ≤ x, s. t. y ≤ d,
AT x = b, b(V ) = 0 Au = y
Theorem
The problems are dual to each other if
p + q = −c T d, (x − c)T (d − y ) = 0, c ≤ x, y ≤ d
Proof.
Since b T u = (AT x)T u = x T Au = x T y , [min] − [max] = (d T x + p) −
(b T u − [c T y + q]) = d T x + c T y − x T y + p + q = (x − c)T (d − y ) ≥ 0
[min] - [max] when equality holds.
W.-S. Luk (Fudan Univ.) Lecture 4: Min-Cost Linear Problems 2012 年 8 月 13 日 2 / 18](https://image.slidesharecdn.com/lec04min-costlinearproblems-120813015506-phpapp01/75/Lec04-min-cost-linear-problems-2-2048.jpg)
![Remark 1
We can formulate a linear problem either in its primal form or in its
dual form, depending on which one is more appropriate, for example,
whether design variables are in integral domain:
max-flow problem (i.e. d T = [−1, −1, · · · , −1]T ) may be better to be
solved by a dual method.
W.-S. Luk (Fudan Univ.) Lecture 4: Min-Cost Linear Problems 2012 年 8 月 13 日 3 / 18](https://image.slidesharecdn.com/lec04min-costlinearproblems-120813015506-phpapp01/75/Lec04-min-cost-linear-problems-3-2048.jpg)
![Linear Optimal Problems
Optimal Flow Problem: Optimal Potential Problem:
min dT x + p max b T u − (c T y + q)
s. t. c − ≤ x ≤ c + , s. t. d − ≤ y ≤ d + ,
AT x = b, b(V ) = 0 Au = y
By modifying the network:
This problem can be reduced to the elementary case [?, pp.275–276]
Piecewise linear convex cost can be reduced to this linear problem [?,
p.239,p.260]
The problem has been studied extensively with a lot of applications.
W.-S. Luk (Fudan Univ.) Lecture 4: Min-Cost Linear Problems 2012 年 8 月 13 日 4 / 18](https://image.slidesharecdn.com/lec04min-costlinearproblems-120813015506-phpapp01/75/Lec04-min-cost-linear-problems-4-2048.jpg)
![For Special Cases
Max flow problem (d = −[1, · · · , 1])
Ford-Fulkerson algorithm: iteratively insert additional minimal flows
according to an argument path of the residual network, until no
argument path of the residual network is found.
Preflow Push-Relabel algorithm (dual method???)
Matching problems ([c − , c + ] = [0, 1])
Edmond’s blossom algorithm
W.-S. Luk (Fudan Univ.) Lecture 4: Min-Cost Linear Problems 2012 年 8 月 13 日 7 / 18](https://image.slidesharecdn.com/lec04min-costlinearproblems-120813015506-phpapp01/75/Lec04-min-cost-linear-problems-7-2048.jpg)
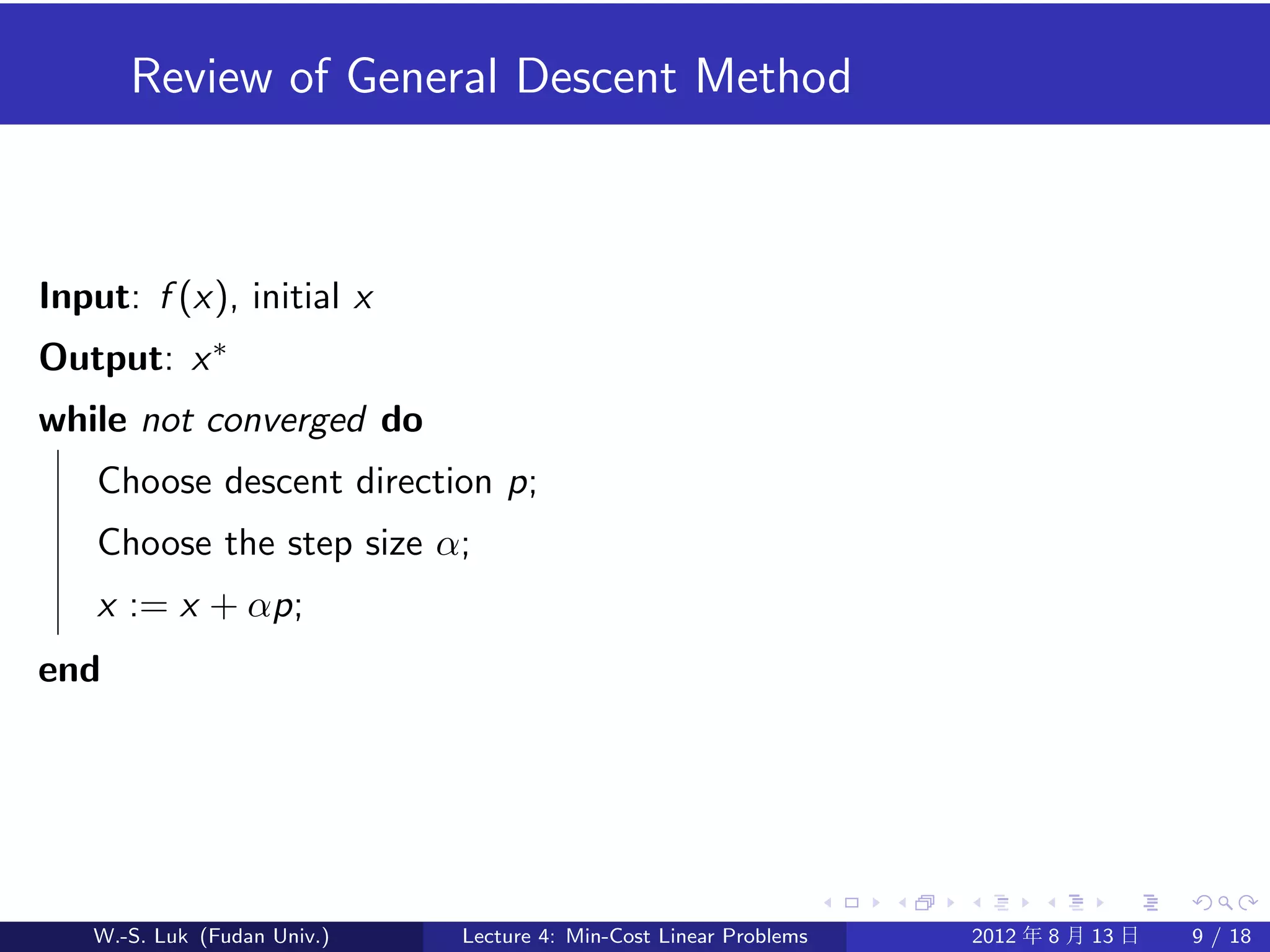
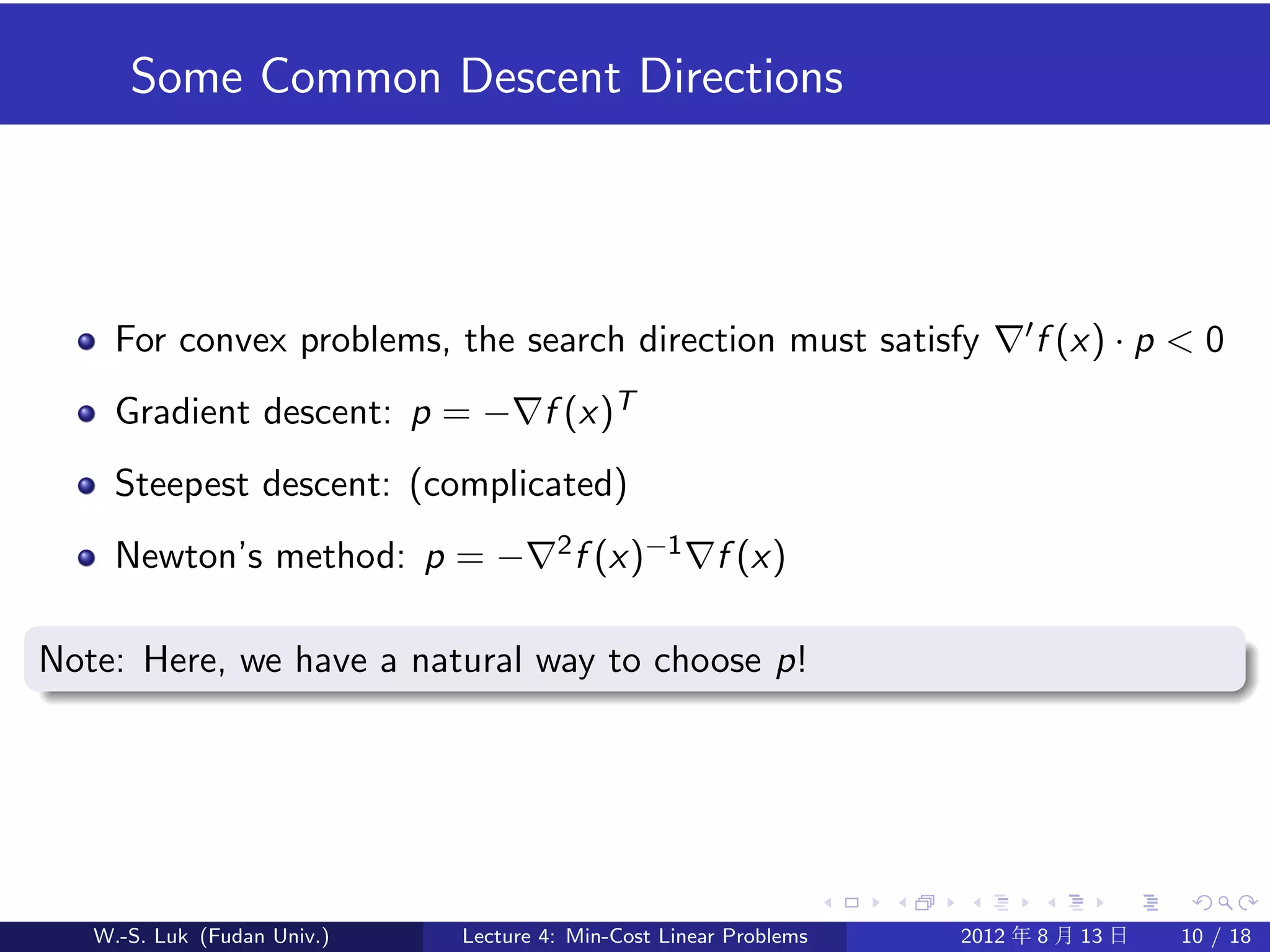
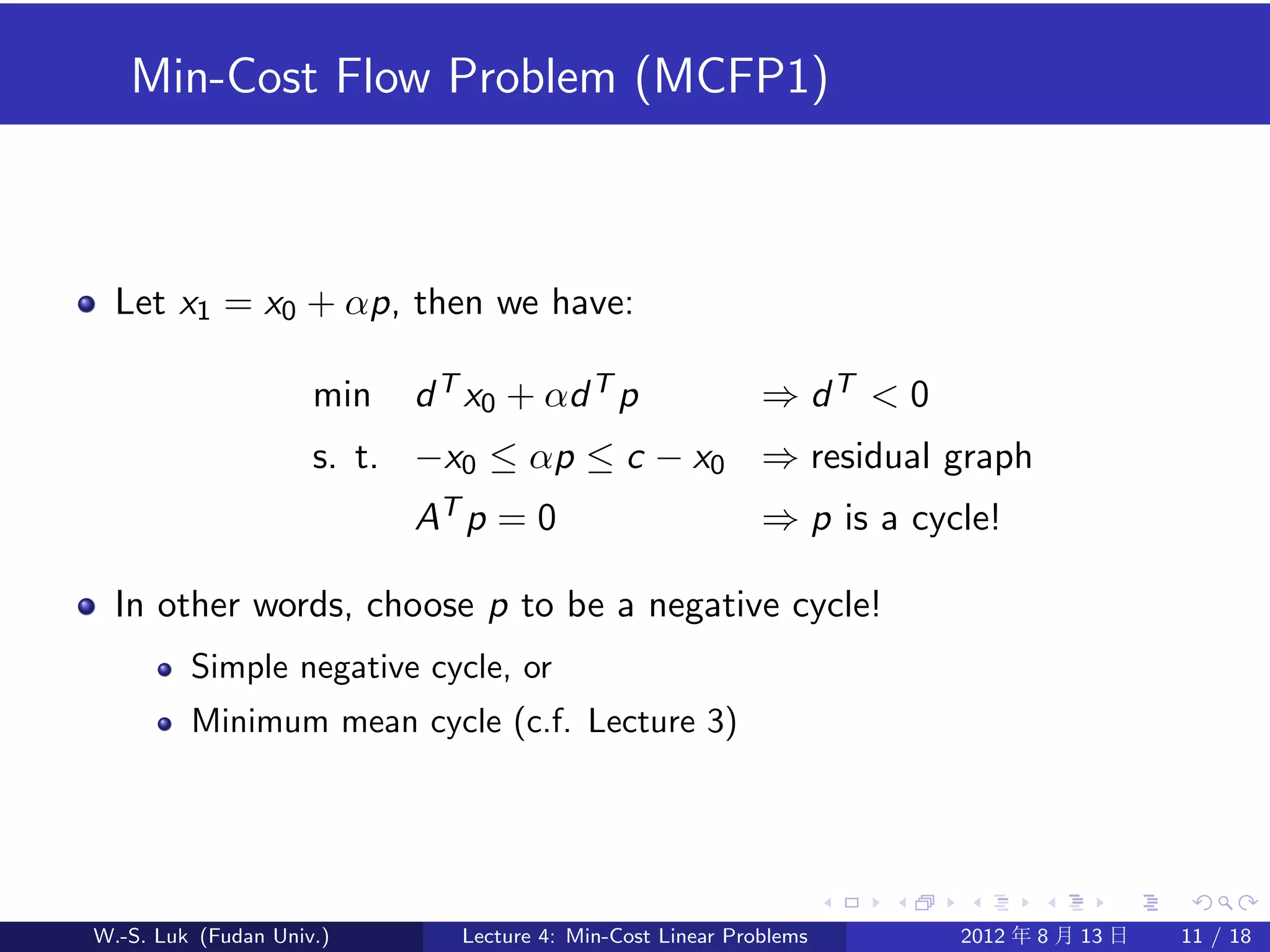
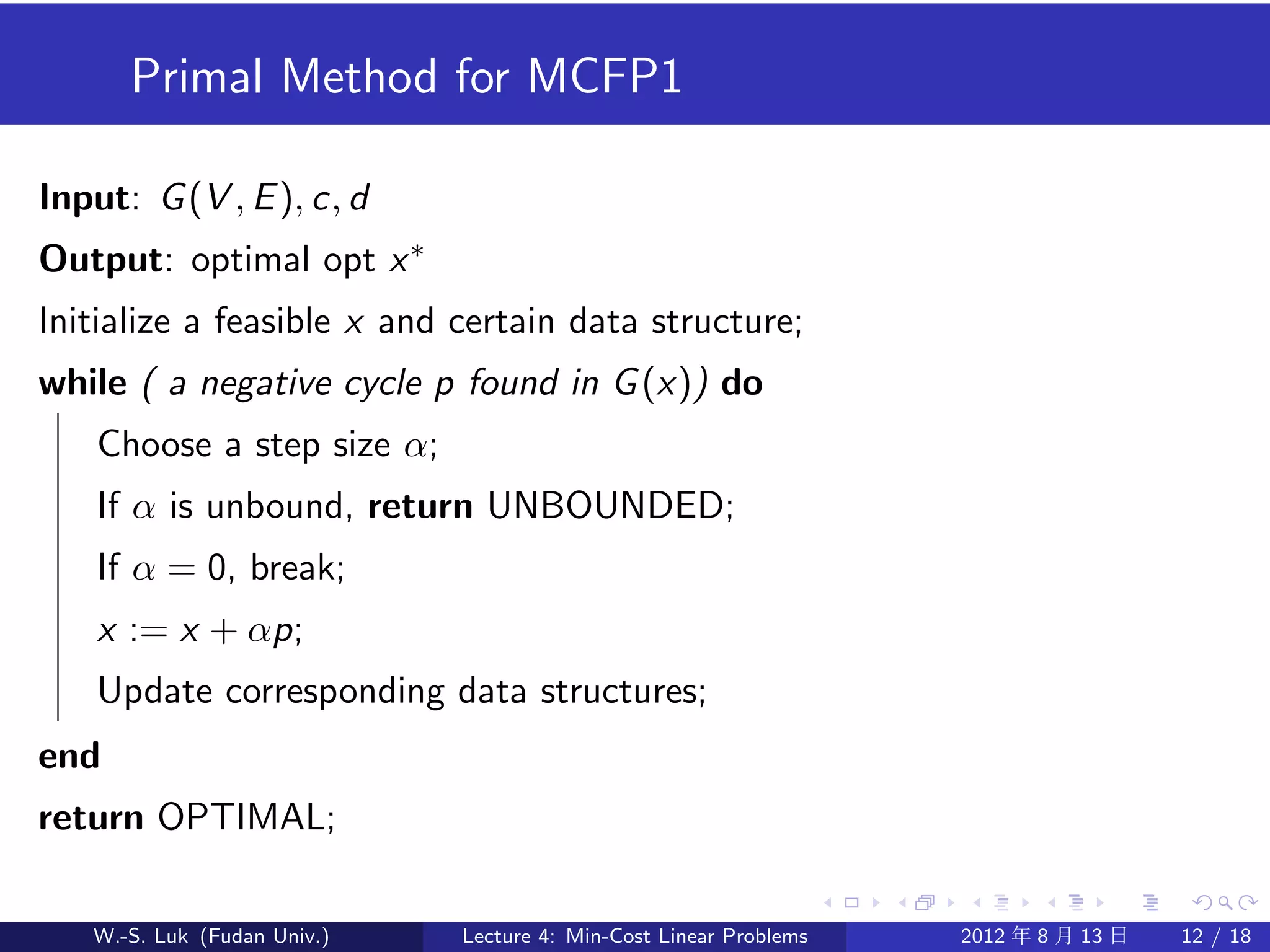

The document summarizes algorithms for solving min-cost linear problems, including min-cost flow problems and min-cost potential problems. It describes how these problems can be formulated and solved using descent methods, where the search direction is chosen as a negative cycle or cut with minimum cost. Iteratively, an optimal solution is found by moving in the direction of negative cycles or cuts and updating residual graphs and data structures. Duality between the min-cost flow and potential problems is also discussed.









































































![Coded Agents – with UiPath SDK + LangGraph [Virtual Hands-on Workshop]](https://cdn.slidesharecdn.com/ss_thumbnails/codedagentsdeck-251215155422-5497c599-thumbnail.jpg?width=640&height=640&fit=bounds)




