Lunar Ecosystem and Architectural Prototype (LEAP2)
•
1 like•291 views

Lunar Site Development of the Marius Hills Skylight: LEAP2 is a commercial lunar settlement program that addresses space architecture issues in lunar exploration, economic development, mining, and sustainment at a specific lunar site identified as the Marius Hills Skylight. Projects within the LEAP2 program address various technology solutions and missions for achieving multi-generational program goals to develop the site for human settlement.

Recommended
More Related Content
Similar to Lunar Ecosystem and Architectural Prototype (LEAP2)
Similar to Lunar Ecosystem and Architectural Prototype (LEAP2) (20)
Lunar Ecosystem and Architectural Prototype (LEAP2)
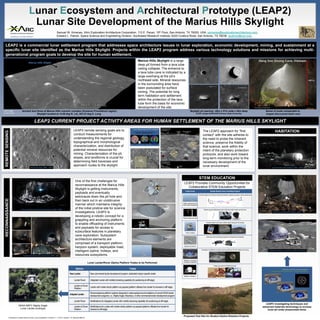
- 1. Lunar Ecosystem and Architectural Prototype (LEAP2) Lunar Site Development of the Marius Hills Skylight Samuel W. Ximenes, XArc Exploration Architecture Corporation, 112 E. Pecan, 10th Floor, San Antonio, TX 78205, USA, sximenes@explorationarchitecture.com, Edward L. Patrick, Space Science and Engineering Division, Southwest Research Institute, 6220 Culebra Road, San Antonio, TX 78238. epatrick@swri.edu. LEAP2 is a commercial lunar settlement program that addresses space architecture issues in lunar exploration, economic development, mining, and sustainment at a specific lunar site identified as the Marius Hills Skylight. Projects within the LEAP2 program address various technology solutions and missions for achieving multigenerational program goals to develop the site for human settlement. Marius Hills Skylight is a large deep pit formed from a lava tube ceiling collapse. The entrance to a lava tube cave is indicated by a large overhang at the pit’s northeast side. Mineral resources in the surrounding area have been postulated for surface mining. The potential for long term habitation and settlement within the protection of the lava tube form the basis for economic development of the site. Marius Hills Sklight Click image to view video Ancient lava flows at Marius Hills volcanic complex (Oceanus Procellarum region) Skylight located at 14.09 deg N. Lat, 303.23 deg E. Long. Skylight pit opening ~48m x 57m wide x 45m deep (LROC images NASA/GSFC/Arizona State University) Sense of scale comparable to largest discovered earth cave RECONNAISSANCE REMOTE SENSING LEAP2 CURRENT PROJECT ACTIVITY AREAS FOR HUMAN SETTLEMENT OF THE MARIUS HILLS SKYLIGHT LEAP2 remote sensing goals are to conduct measurements for understanding the regional geology, topographical and morphological characterization, and distribution of potential mineral resources for mining. Characterization of the pit, slopes, and landforms is crucial for determining field traverses and approach routes to the skylight. Remote Sensing: 2009 – 2018 Science Robotic Reconnaissance Missions: 2018 - 2020 Human and Robotic Reconnaisance: 2020 - 2025 The LEAP2 approach for “first contact” with the site adheres to the need to probe the inherent science, preserve the fidelity of that science, work within the intent of the planetary protection protocols, and also work toward long-term monitoring prior to the necessary development of the lunar environment. LEAP2 Provides Community Opportunities for Collaborative STEM Education Projects Project Areas Platform deployment and zipline cable management Robotics camp for telescoping mast or tight-rope walking robots and drop lines Settlement Construction Begins: 2050 + Robotic trolleys and mast Construct scaled Lunar terrain models (model making and 3D printing) Terrain modeling Experiment with line throwing equipment for trajectories and targeting Harpoon and Cannon Visualization of settlement concepts, drawing, sketching, 3D CAD modeling, 3D printing New commercial lander development program; dedicated mission specific lander Habitation: Inflatable’s Lander with mobile robotic platform as payload (platform offloads from lander for traverse to cliff edge) Adapted Lander NASA Design and construct inflatable structures Integrated Lander with mobility traversing capability (for positioning at cliff edge) Lander w/ Rover Platform Setttlement Phase: Latter Part of the 21st Century Habitation: Long Range Concepts for Settlement Trades Lander Rover NASA MSFC Mighty Eagle Lunar Lander prototype Sample Student Team Consulting Projects Test Site: Design and construct a zipline test site either outdoors full scale or indoors partial scale Lunar Lander/Rover Zipline Platform Trades to be Performed New Lander Long Duration Stay Outpost: 2025 - 2050 STEM EDUCATION One of the first challenges for reconnaissance at the Marius Hills Skylight is getting instruments, payloads and eventually astronauts down the pit hole and then back out in an unobtrusive manner which maintains integrity of the initial pristine site for science investigations. LEAP2 is developing a robotic concept for a grappling and anchoring platform to enable offloading of instruments and payloads for access to subsurface features in planetary cave exploration. Subsystem architecture elements are comprised of a transport platform, harpoon system, deployable mast, intelligent zipline, trolleys, and resources subsystems. Options HABITATION Reconnaissance platform systems designed to meet payload accommodations of current NASA lander development programs, i.e., Mighty Eagle, Morpheus, or other commercial lander development program Lander Rover Modifications for integrated Lander with mobility traversing capability (for positioning at cliff edge) Lander w/ Rover Platform Modifications for Lander with mobile robotic platform as payload (platform offloads from lander for traverse to cliff edge) Workshop on Golden Spike Human Lunar Expeditions, October 3 – 4, 2013, Houston, TX (Abstract #6015) LEAP2 investigating techniques and advanced materials technology to enclose lunar pit under pressurized dome Proposed Test Site for Student Zipline Robotics Projects