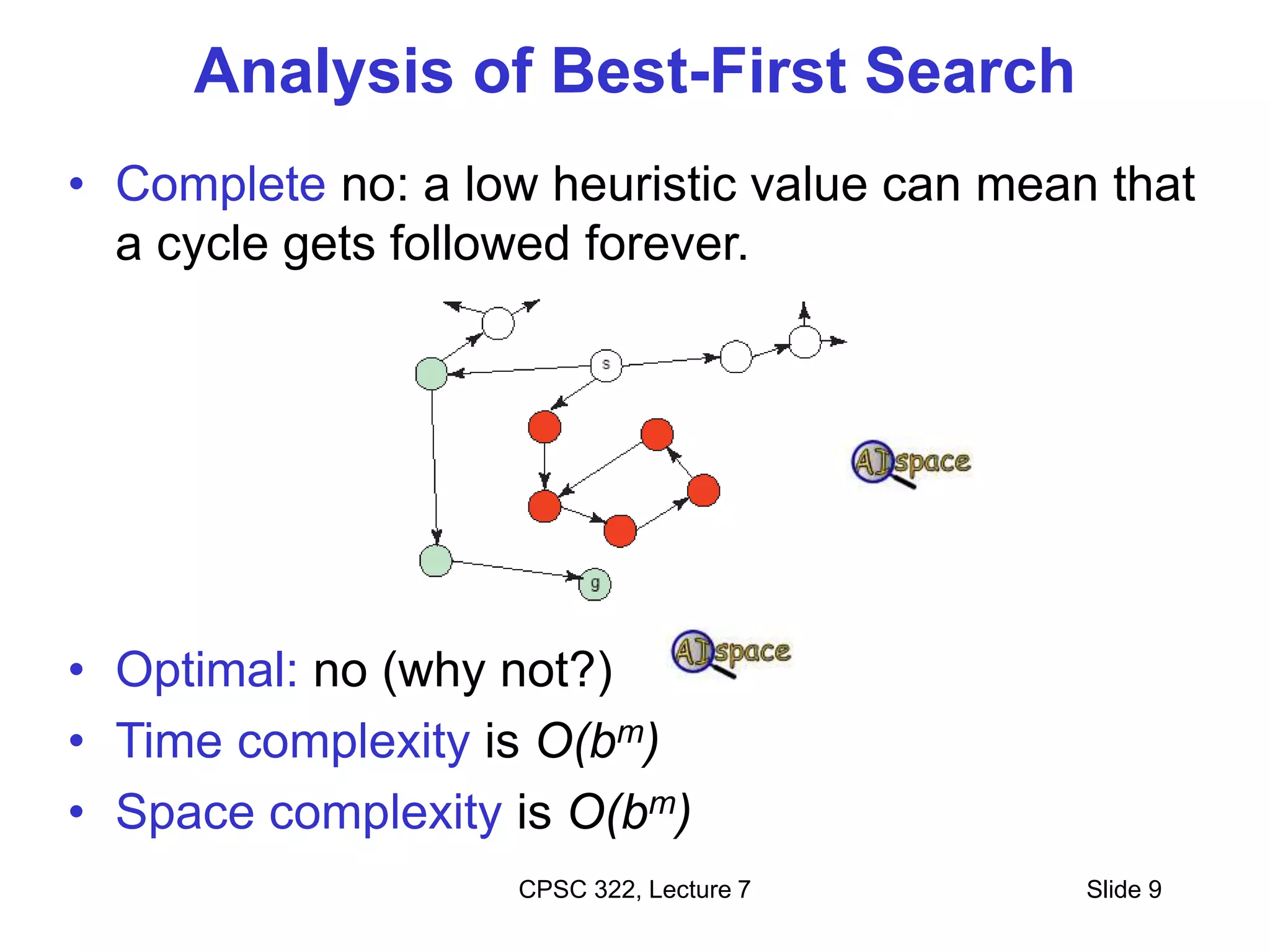
This document summarizes a lecture on heuristic search algorithms BestFS and A*. It discusses BestFS as selecting the path whose end is closest to the goal according to the heuristic function, treating the frontier as a priority queue ordered by h-value. It then covers A* as a combination of lowest-cost-first and best-first search that treats the frontier as ordered by f(n)=g(n)+h(n). The document proves that A* is optimal if h is admissible and arc costs are positive. It provides examples of A* applications and directs students to resources for visualizing search algorithms.