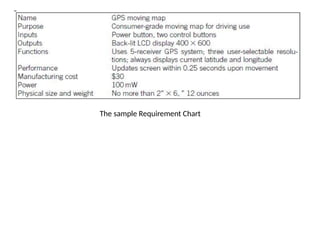
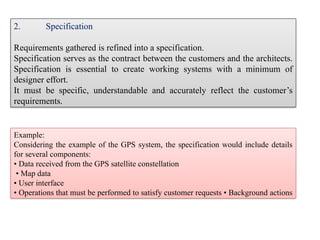
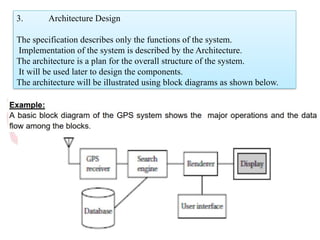
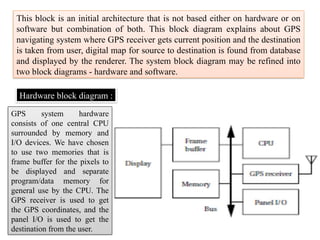
Embedded system software refers to the software components of embedded systems, primarily consisting of firmware and applications. The design process involves multiple steps including requirements gathering, specification formulation, and system integration, while the architecture defines the overall structure. Real-time operating systems (RTOS) are crucial for managing time-sensitive tasks, ensuring that they meet specific deadlines and handle failures reliably.

































![industry 4.0-Revolution-PowerPoint-Templates [Autosaved].pptx](https://cdn.slidesharecdn.com/ss_thumbnails/industry4-240910061852-d49188b5-thumbnail.jpg?width=640&height=640&fit=bounds)



















