More Related Content

PDF
機械系のためのメカトロニクス 1)イントロダクション 
PPTX
コンピュータ断層画像法(CT)による三次元OTN近赤外蛍光イメージング 
PPTX
先進的な3D-cCTUによる,腎結石のPNL手術プランニング 
PPTX

PDF
TechUP Makersデモデイ - リハビリ支援のためのIoTデバイス『UbiCane』 
PPTX
超音波センサーを用いた4点杖の使用者のコンテキスト推定法の提案 
PPTX
20161027 robot seminar in Nagasaki 
PDF
Viewers also liked

PPT
Deep Auto-Encoder Neural Networks in Reiforcement Learnning (第 9 回 Deep Learn... 
PDF

PDF
2N2-04:3次元電子マットと人体パターン認証を用いた予測型見守り機能 安川徹(nkワークス株式会社) 
PDF

PPTX

PDF
2 n2 02:ロボット介護機器の力学的効果評価 吉田英一(産総研) 
PPTX

PPTX

PDF

PDF

PDF

PDF

PDF

PDF
"Deep Learning" Chap.6 Convolutional Neural Net 
PDF
論文紹介 Compressing Neural Networks with the Hashing Trick 
PDF

PDF

PDF

PDF
超音波を利用した先端研究 ~集束超音波による非接触作用力の応用展開について~ 
PDF
「深層学習」勉強会LT資料 "Chainer使ってみた" More from Yuta Takahashi

PDF
PikaBreak: 光で休憩を促してくれるスマートタイマー 
PDF
ライフログを軸としたユビキタスコンピューティング技術 
PDF
生活リズムの類似性や周期性に基づく心身の健康状態の推定と予測 
PPTX
観光中の内的状態推定に向けた観光客の無意識的しぐさの分析 
PDF
生産性の低下抑止のためのウェアラブル機器による体調の推定と予測 
PDF
DeepRemote: A Smart Remote Controller for Intuitive Control through Home Appl... 
PDF
An Identification Method of IR Signals to Collect Control Logs of Home Applia... 
PDF
歩行リハビリ支援のためのセンサ装着杖を 介した歩行動作認識手法の提案 
PPTX
労働生産性改善に向けたウェアラブル機器を用いた体調推定法の検討 
PDF
Ubiquitous Tips - スキルウェンズデー 
PPTX

PDF
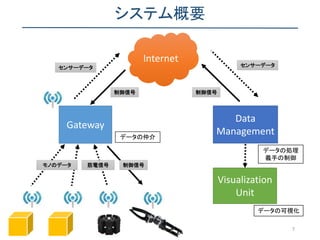
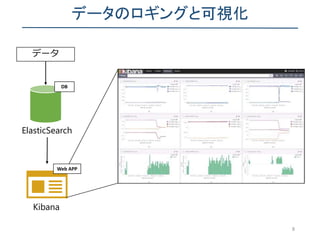
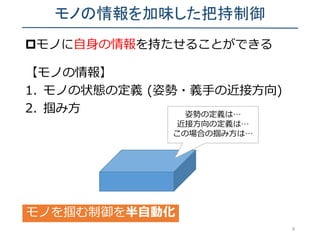
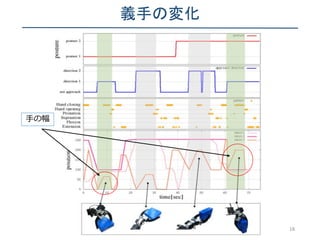
筋電制御を支援するIoTプラットフォームと�把持戦略の構築
- 1.
- 2.
- 3.
- 4.
- 5.
- 6.
- 7.
- 8.
- 9.
- 10.
- 11.
- 12.
- 13.
- 14.
- 15.
- 16.
- 17.
- 18.
- 19.