The document provides an overview of basic programming concepts for the LEGO Mindstorms NXT system, including:
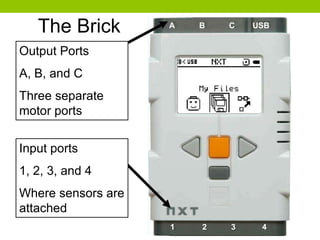
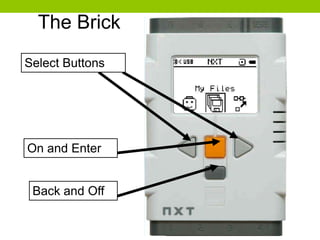
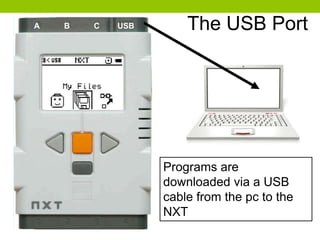
1) The NXT controller has output ports A, B, and C to connect motors, and input ports 1-4 to connect sensors. Programs are downloaded via USB from a computer.
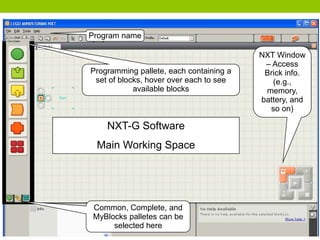
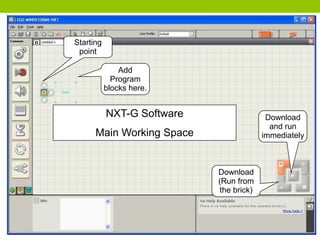
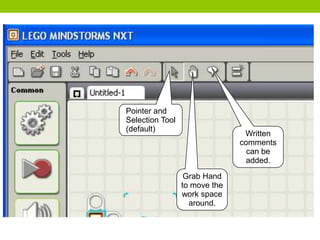
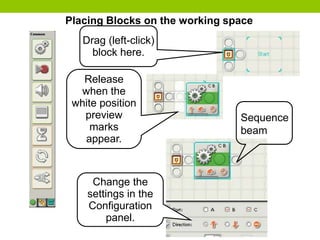
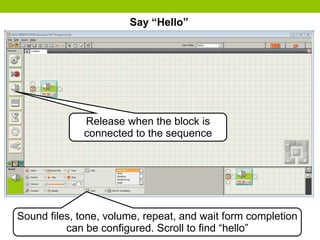
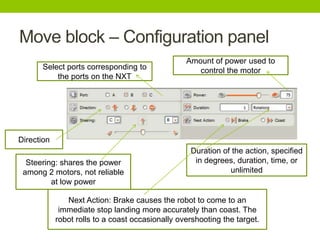
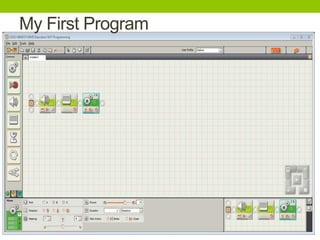
2) The NXT-G programming interface features palettes of programming blocks. Programs are built by dragging blocks onto a workspace and connecting them in sequences.
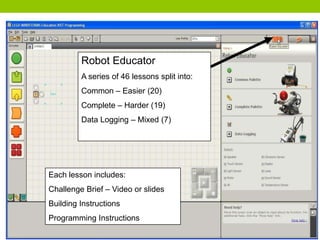
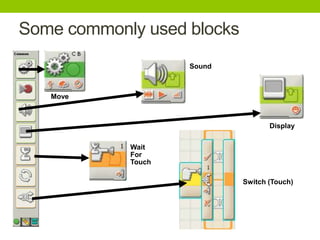
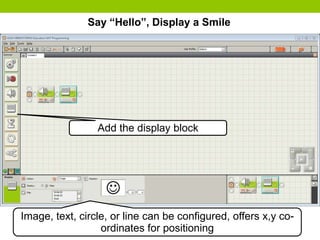
3) The Robot Educator lessons teach programming concepts through challenges. Lessons cover topics like moving motors, waiting, responding to sensors. Commonly used blocks control actions like moving, displaying, and playing sounds.