Downloaded 42 times


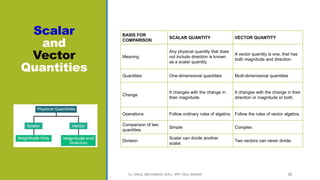





The document provides a comprehensive introduction to engineering mechanics, covering fundamental concepts such as statics, dynamics, and the different types of forces. It discusses the definitions and characteristics of scalar and vector quantities, as well as techniques for problem solving and unit conversions in mechanics. The content is designed for civil engineering students and is structured to facilitate understanding the principles of mechanics through various models and idealizations.