The document discusses a study aimed at developing a general-purpose learnable physics engine that can understand various physical dynamics through interaction networks. The model was tested on simulated scenarios, showcasing better performance compared to alternative approaches in learning physical interactions. Key findings suggest the potential for expansion and application to larger systems while questioning the efficiency and advantages over existing models.




![Implementation 2
7
m(G) = Ds
Ds
DR
NR
ORr
ORs
Ra
= B
[b1, b2, ..., bk]
[e1, e2, ..., ek] = E
fR](https://image.slidesharecdn.com/20170119nips-170125085027/85/Interaction-Networks-for-Learning-about-Objects-Relations-and-Physics-7-320.jpg)
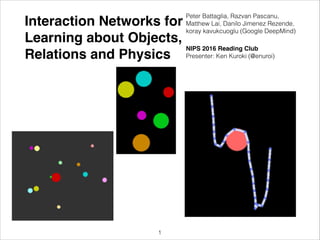
![Implementation 3
8
G, X, E
E = ERr
– T
[O; X; E] = C
–
Ds
Ds
DR
NR
O
X
E
–
fR
a
P = Ot+1
DA
fA
(Free energy)](https://image.slidesharecdn.com/20170119nips-170125085027/85/Interaction-Networks-for-Learning-about-Objects-Relations-and-Physics-8-320.jpg)

















![Differential privacy without sensitivity [NIPS2016読み会資料]](https://cdn.slidesharecdn.com/ss_thumbnails/nipsyomi2016slideshare-170122091905-thumbnail.jpg?width=640&height=640&fit=bounds)





![[DL輪読会]Convolutional Sequence to Sequence Learning](https://cdn.slidesharecdn.com/ss_thumbnails/dl0519-170519005603-thumbnail.jpg?width=640&height=640&fit=bounds)