This document describes implementing a modified particle filter algorithm for localization in an FPGA. The modified algorithm improves speed and accuracy. It was tested through simulations of global localization, localization and tracking, and kidnapping scenarios. The hardware implementation was 34x faster than software and successfully localized the robot in all experiments, demonstrating the FPGA is capable of running the particle filter in real-time.

![Global Localization
SW HW
Weight of the particle which
estimates the pose of the robot
105 94
Difference between true and
estimated pose
[0.4, 1] [0, 0.8]
Time to localize the robot 2.655 s 0.119 s
Number of iterations of the
algorithm
14 24
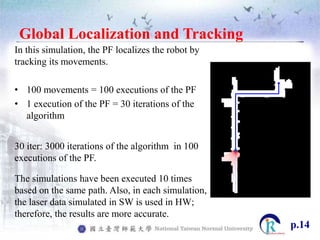
The results come from an experiment with the function of localizing the
robot in a specific location.
The simulations have been executed 10 times, and the below table
demonstrates the average of these 10 attempts.
p.13](https://image.slidesharecdn.com/78a00cc6-d9d3-4658-84db-0fd46ccc8d1c-160627174225/85/Implement-a-modified-algorithm-PF-in-a-FPGA-14-320.jpg)