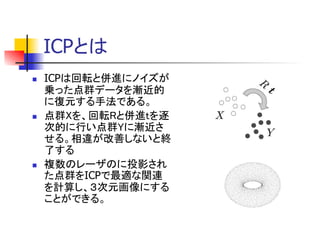
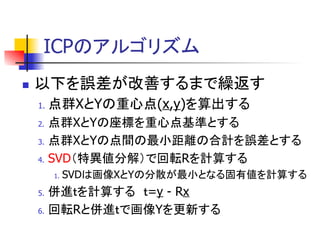
This slide explain about identification between various points cloud that is generated by Leaser scanning. The identification is made by ICP(Interactive Closed Point) which uses SVD method.