Download to read offline

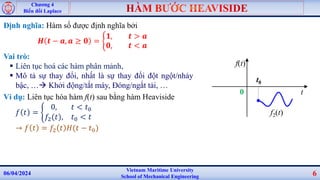



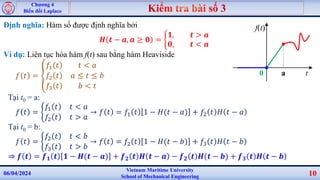





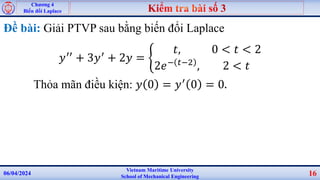

Tài liệu trình bày về biến đổi Laplace trong lĩnh vực kỹ thuật cơ khí, bao gồm định nghĩa và ứng dụng của hàm Heaviside để liên tục hóa các hàm phân mảnh. Nó cũng cung cấp các ví dụ giải phương trình vi phân bằng biến đổi Laplace và thảo luận về điều kiện đầu và ảnh hưởng của chúng trong giải pháp. Các phép biến đổi Laplace này được sử dụng để khảo sát động lực học của hệ thống trong miền tần số và trở về miền thời gian thực.




























































![Chương 6 Các phương tiện thanh toán quốc tế [Autosaved].pptx](https://cdn.slidesharecdn.com/ss_thumbnails/chng6ccphngtinthanhtonquctautosaved-260105115222-a3490ed9-thumbnail.jpg?width=640&height=640&fit=bounds)

