Downloaded 32 times

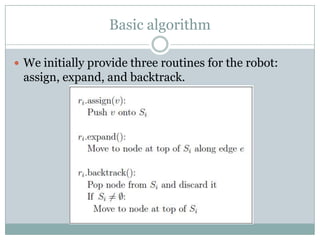
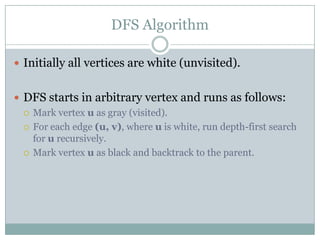
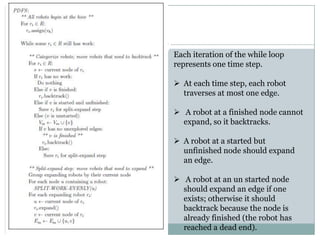
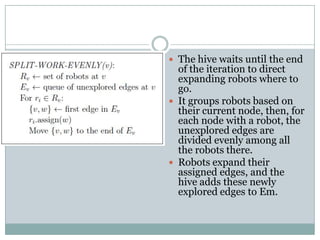
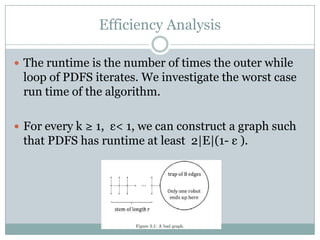

The document presents a parallelized depth-first search (PDFS) algorithm for efficient environmental mapping by robot swarms. PDFS models the environment as a graph and divides the depth-first search exploration among multiple robots. At each time step, the algorithm assigns unfinished edges for robots to expand in parallel. While PDFS terminates when full exploration is complete, its worst-case runtime is no better than single-robot DFS due to scenarios where many robots finish early, leaving one robot as a bottleneck. The algorithm aims to efficiently map environments like crop fields to determine optimal pollination paths.