Download as PDF, PPTX



![APM-Kruskal(G, f)
1. A ⟵ ∅
2. pentru v ∊ V execută
3. Formează-Set(v)
3. Sortează muchiile din E după costurile f
4. pentru (u, v) ∊ E execută
5. dacă Găsește-Set(u) ≠ Găsește-Set(v) atunci
6. A ⟵ A ∪ {(u, v)}
7. Unește(u, v)
8. întoarce A
Demonstrații de corectitudine în [1][2]
APM-Kruskal](https://image.slidesharecdn.com/vladradu-101031055016-phpapp01/85/Graph-Algorithms-for-FII-Gamedev-12-320.jpg)
![Exemple
preluate din [2]
APM-Kruskal
1
2 3 5 6
4
9 5 3 1
2
7 3 1
1 43 6
5
2
34
5
5681
80
44
62](https://image.slidesharecdn.com/vladradu-101031055016-phpapp01/85/Graph-Algorithms-for-FII-Gamedev-14-320.jpg)
![APM-Prim(G, f , r)
1. Q ⟵ V
2. pentru u ∊ Q execută
3. distanță[u] ⟵ ∞
4. distanță[r] ⟵ 0
5. tată[r] ⟵ NIL
6. cât timp Q ≠ ∅ execută
7. u ⟵ Extrage-Min(Q)
8. pentru v ∊ {w | (u, w) ∊ E} execută
9. dacă v ∊ Q și f(u, v) < distanță[v] atunci
7. tată[v] ⟵ u
8. distanță[v] ⟵ f(u, v)
9. Actualizează-Min(Q, v, distanță[v])
APM-Prim](https://image.slidesharecdn.com/vladradu-101031055016-phpapp01/85/Graph-Algorithms-for-FII-Gamedev-15-320.jpg)
![Operațiile Extrage-Min și Actualizează-Min
sunt implementate cu ajutorul unui heap/set,
complexitatea timp totală e O(M × log(N)).
Întreg algoritmul
are complexitatea timp O(M × log(N)),
aceeași cu cea Kruskal deoarece M < N2.
Demonstrație de corectitudine în [1]
APM-Prim](https://image.slidesharecdn.com/vladradu-101031055016-phpapp01/85/Graph-Algorithms-for-FII-Gamedev-16-320.jpg)
![APM-Prim
Exemple
preluate din [2]
1
2 3 5 6
4
9 5 3 1
2
7 3 1
1 43 6
5
2
34
5
5681
80
44
62](https://image.slidesharecdn.com/vladradu-101031055016-phpapp01/85/Graph-Algorithms-for-FII-Gamedev-17-320.jpg)
![Enunțarea problemei
Să se găsească drumul de cost minim între
oricare două vârfuri din V.
Soluția prin programare dinamică
Se poate demonstra [3] că un drum de cost
minim de la u la w este concatenarea a două
drumuri de cost minim: un drum de cost
minim de la u la v și unul de la v la w.
Drum minim de sursă multiplă](https://image.slidesharecdn.com/vladradu-101031055016-phpapp01/85/Graph-Algorithms-for-FII-Gamedev-19-320.jpg)
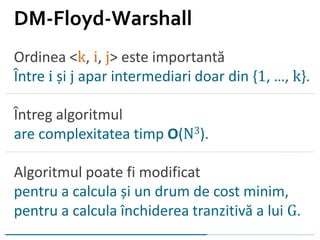
![DM-Floyd-Warshall
DM-Floyd-Warshall(A)
1. D ⟵ A
2. pentru k ⟵ 1, N execută
3. pentru i ⟵ 1, N execută
4. pentru j ⟵ 1, N execută
5. Dij = min(Dij, Dik + Dkj)
6. întoarce D
Demonstrații de corectitudine în [1][3]](https://image.slidesharecdn.com/vladradu-101031055016-phpapp01/85/Graph-Algorithms-for-FII-Gamedev-20-320.jpg)
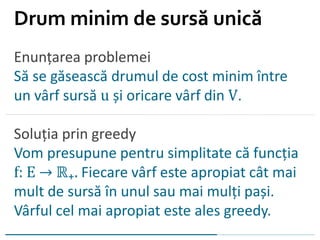
![DM-Bellman-Ford(G, f , s)
01. pentru u ∊ V execută
02. distanță[u] ⟵ ∞
03. distanță[s] ⟵ 0
04. tată[s] ⟵ NIL
05. Q ⟵ s
06. cât timp Q ≠ ∅ execută
07. u ⟵ Pop-Coadă(Q)
08. pentru v ∊ {w | (u, w) ∊ E} execută
09. dacă distanță[v] > distanță[u] + f(u, v) atunci
10. distanță[v] ⟵ distanță[u] + f(u, v)
11. tată[v] ⟵ u
12. Push-Coadă(Q, v)
DM-Bellman-Ford](https://image.slidesharecdn.com/vladradu-101031055016-phpapp01/85/Graph-Algorithms-for-FII-Gamedev-23-320.jpg)
![Operațiile Pop-Coadă și Push-Coadă
necesită timp constant,
deci au complexitatea timp constant O(1).
Întreg algoritmul
are complexitatea timp O(M × N),
dar în practică se comportă foarte bine.
Demonstrație de corectitudine în [1]
DM-Bellman-Ford](https://image.slidesharecdn.com/vladradu-101031055016-phpapp01/85/Graph-Algorithms-for-FII-Gamedev-24-320.jpg)
![DM-Bellman-Ford
Exemple
preluate din [2]
1 2
1 43 6
5
2
34
5
5681
80
44
62
45
3
6 7
2
3
8
10
2
4
7
1
20 2
3
1
2 3 5 6
4
9 5 3 1
2
7 3 1](https://image.slidesharecdn.com/vladradu-101031055016-phpapp01/85/Graph-Algorithms-for-FII-Gamedev-25-320.jpg)
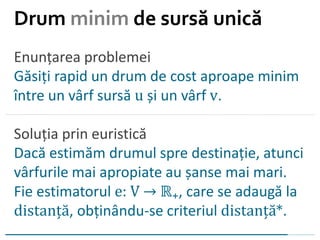
![DM-Dijkstra
DM-Dijkstra(G, f , s)
01. pentru u ∊ V execută
02. distanță[u] ⟵ ∞
03. distanță[s] ⟵ 0
04. tată[s] ⟵ NIL
05. S ⟵ ∅
06. Q ⟵ V
07. cât timp Q ≠ ∅ execută
08. u ⟵ Extrage-Min(Q)
09. S ⟵ S ∪ {u}
10. pentru v ∊ {w | (u, w) ∊ E} execută
11. dacă distanță[v] > distanță[u] + f(u, v) atunci
12. distanță[v] ⟵ distanță[u] + f(u, v)
13. Actualizează-Distanță(Q, v, distanță[v])
14. tată[v] ⟵ u](https://image.slidesharecdn.com/vladradu-101031055016-phpapp01/85/Graph-Algorithms-for-FII-Gamedev-26-320.jpg)
![Actualizează-Distanță și Extrage-Min
sunt implementate cu ajutorul unui heap/set;
complexitatea timp totală e O(N × log(N)).
Algoritmul Dijkstra
are complexitatea timp O((M + N) × log(N)),
deoarece fiecare muchie poate actualiza Q.
Demonstrație de corectitudine în [1]
DM-Dijkstra](https://image.slidesharecdn.com/vladradu-101031055016-phpapp01/85/Graph-Algorithms-for-FII-Gamedev-27-320.jpg)
![DM-Dijkstra
Exemple
preluate din [2]
1 2
1 43 6
5
2
34
5
5681
80
44
62
45
3
6 7
2
3
8
10
2
4
7
1
20 2
3
1
2 3 5 6
4
9 5 3 1
2
7 3 1](https://image.slidesharecdn.com/vladradu-101031055016-phpapp01/85/Graph-Algorithms-for-FII-Gamedev-28-320.jpg)
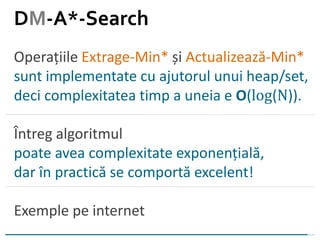
![DM-A*-Search
DM-A*-Search (G, f , e, s)
01. pentru u ∊ V execută
02. distanță[u] ⟵ ∞
03. distanță[s] ⟵ 0
04. tată[s] ⟵ NIL
05. S ⟵ ∅
06. Q ⟵ V
07. cât timp Q ≠ ∅ execută
08. u ⟵ Extrage-Min*(Q)
09. S ⟵ S ∪ {u}
10. pentru v ∊ {w | (u, w) ∊ E} execută
11. dacă distanță[v] > distanță[u] + f(u, v) atunci
12. tată[v] ⟵ u
13. distanță[v] ⟵ distanță[u] + f(u, v)
14. Actualizează-Min*(Q, v, distanță*[v])](https://image.slidesharecdn.com/vladradu-101031055016-phpapp01/85/Graph-Algorithms-for-FII-Gamedev-30-320.jpg)
![Lecții
http://en.wikipedia.org/wiki/Pathfinding
http://www.policyalmanac.org/games/aStarTutorial.htm
http://theory.stanford.edu/~amitp/GameProgramming/
Demo
http://links.math.rpi.edu/applets/appindex/graphtheory.html
http://www.unf.edu/~wkloster/foundations/DijkstraApplet/DijkstraApplet.htm
http://jung.sourceforge.net/applet/shortestpath.html
Cărți
[1] Thomas Cormen, Charles Leiserson, Ronald Rivest, Introducere în algoritmi, Agora 2000
[2] Emanuela Cerchez, Marinel Șerban, Programarea în limbajul C/C++ pentru liceu •••, Polirom 2006
[3] Dorel Lucanu, Mitică Craus, Proiectarea algoritmilor, Polirom 2008
Referințe](https://image.slidesharecdn.com/vladradu-101031055016-phpapp01/85/Graph-Algorithms-for-FII-Gamedev-32-320.jpg)

Documentul detaliază algoritmi de găsire a drumurilor minime în grafuri, inclusiv Kruskal, Prim, Floyd-Warshall, Bellman-Ford, Dijkstra, și A*. Fiecare algoritm are o complexitate de timp specifică, iar documentul explică modul în care se pot aplica pentru identificarea drumurilor de cost minim între vârfuri. Se oferă, de asemenea, exemple și resurse suplimentare pentru aprofundarea subiectului.

















![From APM to Full Stack with Blue Medora [FutureStack16]](https://cdn.slidesharecdn.com/ss_thumbnails/cameronjonesbluemedora-161201222854-thumbnail.jpg?width=640&height=640&fit=bounds)