Downloaded 223 times
![') ()ttttlt:sr Srr/t,1rl
Disamping itu dalam konteks aktivitas, ruang lingkup aktivitas
pekerjaan-pekerjaan ilmu geodesi umumnya akan mencakup ta-
hapan-tahapan:
o pengumpulan data,
. pengolahan dan manipulasi data,
. perepresentasian informasi, serta
. analisa dan utilisasi informasi.
Mengingat luasnya bidang kajian ilmu Geodesi, beberapa sub-bidang
ilmu Geodesi juga bermunculan. Beberapa contoh di antaranya
adalah sub-sub bidang Geodesi Geometrik, Geodesi Fisik, Geodesi
Matematik, dan Geodesi Dinamik. Selanjutnya dengan
perkembangan ilmu pengetahuan dan teknologi serta bidang-bidang
aplikasi baru, dikenal sub-sub bidang baru seperti Geodesi Satelit,
Geodesi Kelautan, Geodesi Geofisik, dan lain-lainnya.
L.2 PENGERTIAN DAN RUANG LINGKUP GEODESI SATELIT
Sejak peluncuran satelit buatan manusia yang pertama ke luar
angkasa, yaitu satelit SPUTNIK- 1 pada 4 Oktober l9S7 lSeeber,
1983j, geodesi satelit telah berkembang menjadi suatu sub-disiplin
ilmu Geodesi yang mandiri dan kuat.
Geodesi Sqtelit dapat didefinisikan sebagai sub-bidang ilmu
geodesi yang menggunakan bantr_ran satelit (alam ataupun buatan
manusia) untuk menyelesaikan problem-problem geodesi. Menu-
rut Seeber (1983) Geodesi Satelit meliputi teknik-teknik pengamat-
an dan perhitungan yang digunakan untuk mdmecahkan problem-
problem geodesi dengan menggunakan pengukuran-pengukuran
yang teliti ke, dari, dan antarct satelit buatan yang umumnya dekat
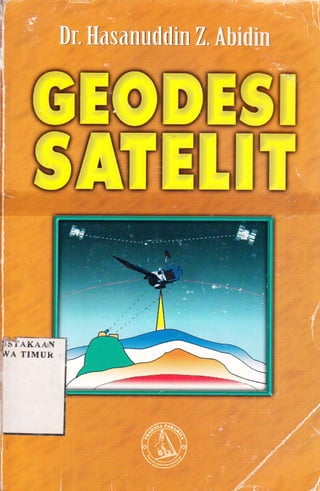
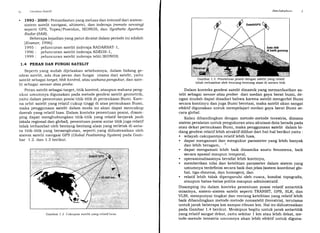
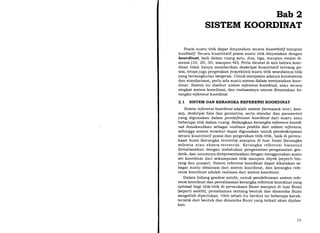
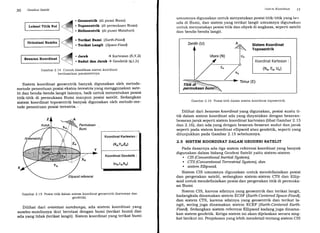
dengan permukaan bumi. Geodesi satelit memiliki banyak aspek
keilmuan, yang sebagian besarnya ditunjukkan secara ilustratif
pada Gambar 1. 1 berikut.
Secara umum permasalahan mendasar yang ingin diselesaikan
oleh disiplin Geodesi Satelit adalah [Seeber, 1983]:
. penentuan posisi 3D yang teliti secara global, regional, maupun
lokal,
. penentuan medan gaya berat bumi dan fungsi-fungsi linearnya
(seperti geoid yang teliti) dalam skala global, regional, maupun
lokal, dan
. pengukuran dan pemodelan dari fenomena geodinamika,
seperti pergerakan kutub, rotasi bumi, dan deformasi kerak
bumi.
Pada saat ini, sistem-sistem pengamatan yang berbasiskan sa-
telit sudah banyak dimanfaatkan untuk menyelesaikan perma-
salahan geodesi tersebut, dengan kecenderungan aplikasi yang se-
makin intensif dan berkembang dari waktu ke waktu.
Sinyal & Propagasi
l'rtrlrtltrtlrt,t'
Gambar 1.1 Aspek-aspek Geodesi Satelit
Perlu juga dicatat bahwa berdasarkan pendekatan dalam meng-
gunakan satelit dikenal kategorisasi geodesi satelit geometrikdan
geodesi satelit dinamik. Pada pendekatan geodesi satelit geome-
trik, satelit dianggap sebagai targ et, titik kontrol, atau wahana p eng -
ukur, danpada pendekatan geodesi satelit dinamik, satelit dianggap
sebagai sensor atauproberdari medan gaya berat. Pendekatan ge-
odesi satelit geometrik banyak berperan dalam penentuan posisi
serta variasi spasial dan temporalnya; sedangkan pendekatan ge-
odesi satelit dinarpik berperan dalam penentuan medan gaya berat
serta variasi spasial dan temporalnya.
Pada edisi kali ini, pembahasan dalam buku ini akan lebih me-
nekankan pada pendekatan geodesi satelit geometrik.
1.3 PERKEMBANGAN GEODESI SATELIT
Perkembangan bidang geodesi satelit dapat dikatakan mulai le-
bih semarak dengan diluncurkannya satelit-satelit buatan manu-
sia ke luar angkasa. Satelit buatan manusia yang pertama dilun-
curkan untuk mengorbit Br,rmi adalah SPUTNIK 1, yang diluncur-
kan pada tanggal 4 oktober 1957 oleh uni Soviet, dan bertahan
hidup sampai awal 1958. SPUTNIK 2, diluncurkan pada tanggal 3
November 1957, dan membawa mahluk hidup pertama ke iuar ang-
kasa, yaitrt seekor anjing bernama Laika. Setelah itu pada tanggal
31 Januari 1958, Amerika Serikat meluncurkan satelitnya yang
pertama yaitu trXPLORER 1, yang menemukan sabuk radiasi van
Rtten di sekitar Bumi fMites, 19741. Dari kacamata geodesi, kontri-
busi yang signifikan dari sistem satelit dimulai dengan satelit vAN-
GUARD 1 yang diluncurkan oleh Amerika Serikat pada Maret 1958
fsmith, 19971. Perlu dicatat di sini bahwa satelit geodetik yang sc-
t".r".ry. adalah satelit ANNA-18, yang diluncurkan pada tahrttr](https://image.slidesharecdn.com/1520geodesisatelit-160412154021/85/geodesi-satelit-survey-7-320.jpg)
![Geodesi Satelit
1962 oleh Amerika Serikat. Satelit ini dilengkapi dengan kamera
geodetik, pengukur jarak elektronik, serta Doppler. Proyek satelit
ANNA ini punya kontribusi ilmiah yang besar dalam pengembang-
an sistem SLR (Satellite Laser Rangingl selanjutnya.
Sampai dengan 19 Januari 2000, jumlah satelit buatan manu-
sia yang telah diluncurkan mengorbit Bumi adalah 5159 satelit,
dimana 2647 rnaslh aktif pada waktu tersebut [A]VA,2000].
Kalau kita menyimak perkembangan geodesi satelit sampai saat
ini, secara umum perkembangannya dapat dikategorikan dalam
periode-periode berikut ini [Seeber, 1983], yaitu:
. Periode 1958 - L97O: Periode ini dapat dianggap sebagai periode
pembangunan metode-metode dasar untuk pengamatan satelit,
dan untuk perhitungan dan analisa orbit satelit. Yang perlu
dicatat dalam periode ini adalah pembangunan dan pemanfaatan
metode fotografi satelit, penentuan koefisien harmonik utama dari
geopotensial, serta publikasi dari model-model bumi pertama,
yaitu SAO-SE (Standard Earth Models of the Smithsonian
Astrophgsical Obseruatory) I sampai SAO-SE III dan GEM (God-
dard Earth Modelsl.
Periode ini juga ditandai dengan peluncuran satelit pertama
yang membawa reflektor laser di tahun 1964, sehingga memulai
era sistem SLR. Disamping itu sejak 1965, sistem VLBI juga mulai
menjadi salah satu teknik standar yang digunakan untuk aplikasi
geodetik. Sistem satelit navigasi TRANSIT (Doppler) dinyatakan
operasional pada tahun 1964; dan pada tahun 1969 dengan
ditempatkannya suatu kelompok reflektor di permukaan Bulan
oleh misi Apollo 11, era metode LLR juga dimulai.
Beberapa kejadian penting dalam konteks perkembangan
geodesi sdtelit pada periode ini adalah [Seeber, 1993; Salomonson
& Walter, 1995]:
1958
1958
1959:
1960
1960
1962
1962
1964
peluncurarr satelit EXPLORER-1 dan Vanguard-I,
parameter penggepengan Bumi ditentukan dari
penjejakan satelit dengan metode satelit fotografi
(penggepengan, f = l/298.3),
pembuktian bahwa Bumi berbentuk "pear-shape" dari
analisa orbit satelit Vanguard yang drjejak dengan metode
satelit fotografi,
peluncuran satelit TRANSIT- 1E},
peluncuran satelit ECHO- 1,
peluncuran satelit ANNA- 1 B,
koneksi Prancis dengan Aljazair secara geodetik,
koneksi antara beberapa datum geodetik yang penting
dengan tingkat ketelitian sekitar 50 m,
Periode l97O - 198O: Periode ini adalah periode pelaksanaan
dari proyek-proyek ilmiah geodesi satelit. Pada periode ini teknik-
teknik pengamatan baru dikembangkan atau dipercanggih, seperti
SLR, LLR (Lunar Laser Ranging) dan Satelit Altimetri. Metode
satelit altimetri mulai berkembang sejak diluncurkannya satelit-
satelit yang membawa radar altimeter, yaitu Skylab (1973) dan
GEOS-3 (1975). Disamping itu, periode ini juga ditandai dengan
maraknya penggunaan sistem satelit TRANSIT untuk survai
geodetik, serta penyempurnaan model-model Bumi.
Dalam konteks geodesi satelit, beberapa kejadian yang patut
dicatat dalam periode ini adalah lKramer, 1996; Salomonson &
Walter, 1995]:
1964
t964
1967
1969
1970
t972
1972
t973
t975
1975
r976
t976
t978
I 'tr r lr rl rr tlrr, ttr
peluncuran satelit pertama yang dilengkirlri rlerrgrrrr
reflektor laser, yaitu satelit BEACON-Explorer lt,
sistem satelit navigasi TRANSIT dinyatakan
operasional untuk militer,
sistem satelit navigasi TRANSIT dinyatakan
operasional untuk pihak sipil,
Misi Apollo 11 menempatkan suatu kelompok
reflektor di permukaan Bulan.
publikasi peta gaya berat global Bumi berorder 16
serta hubungannya dengan tektonik lempeng,
publikasi dari GEM (GoddardEarthModeQ yang ber-
ketelitian sampai derajat dan order 12,
peluncuran satelit inderaja yang pertama LANDSAT-1,
peluncuran satelit altimetri Slrylab,
peluncuran satelit laser ranging STARLETTE,
peluncuran satelit altimetri GEOS-3,
penentuan geoid laut dari analisa data satelit
altimetri,
peluncuran satelit laser ranging LAGEOS-1,
peluncuran satelit navigasi GPS yang pertama.
Periode 1980 - 1993: Periode ini adalah masa dari aplikasi
teknik-teknik satelit dalam bidang geodesi, geodinamika, dan
surveying. Disamping itu metode satelit GPS untuk survai dan
pemetaan juga mulai banyak dimanfaatkan ketimbang metode-
metode terestris.
Beberapa kejadianyang patut dicatat dalam periode ini adalah
fKramer, 1996]:
1982 : peluncuran satelit navigasi GLONASS yang pertama.
1986 : peluncuran satelit inderaja SPOT-1,
1991 : peluncuran satelit inderaja ERS-1,
1992 : peluncuran satelit altimetri TOPEX/POSEIDON,
1992 : peluncuran satelit inderaja JERS- 1.](https://image.slidesharecdn.com/1520geodesisatelit-160412154021/85/geodesi-satelit-survey-8-320.jpg)
![l'2 ( i<,:odesi Solelit
Aplikasi dalam bidang Geodesi Global, antara lain adalah:
. penentuan parameter-parameter orientasi Bumi,
. penentuan model dari Bumi, termasuk dimensi dari ellipsoid
referensinya,
. penentuan model medan gaya berat Bumi, termasuk geoid
globalnya,
. studi-studi geodinamika,
. pengadaan kerangka referensi global, dan
. unifikasi datum-datum geodesi (termasuk datum regional, datum
nasional, dan datum lokal).
Aplikasi untuk Studi Geodinamika, antara lain adalah:
. pengadaan jaringan pemantaw (monitoring network) untuk
mempelaj ari pergerakan lempen g l,ptate / cnt stal motions) ataupun
sistem sesar (fault sYstem,
. penentuan parameter-parameter pergerakan kutub (polar motion)
dan rotasi burni (earth rotation), dan
. penentuan parameter-parameter dari pasang surut bumi (solid
earth tides).
Aplikasi untuk keperluan Kontrol Geodetik antara lain adalah:
. pengadaan kerangka dasar titik-titik kontrol (nasional maupun
lokal),
. pembangunan jaringan titik kontrol 3-D yang homogen,
. analisa dan peningkatan kualitas dari kerangka titik kontrol
terestris Yang ada,
. pengkoneksian kerangka geodetik antarpulau, dan
. densifikasi dan ekstensifikasi dari jaringan titik kontrol.
Aplikasi dalam bidang Navigasi dan Geodesi Kelqutan, antara lain
adalah:
. navigasi dan penjejakan (tracking, balk untuk wahana darat,
laut, udara, maupun angkasa,
. penentuan posisi untuk keperluan surval pemetaan laut
iniarografi, oseanografi, geologi kelautan, geofisika kelautan,
eksplorasi, eksPloitasi, dll),
. pergkoreksian antarstasiun pasut (unifikasi datum tinggi),
. penentuan SST (Sea Surface Topographyl, dan
. penentuan pola arus dan gelombang.
L.7 OBYEKTIF DAN STRUKTUR BUKU
Buku ini dimaksudkan untuk menjelaskan secara umum prin-
sip, konsep, dan aspek-aspek dari disiplin ilmu Geodesi Satelit de-
.rg"r, p.ndekatan penyajian yang bersifat tidak terlalu teoretis.
Meskipun buku ini dapat dimanfaatkan secara umum oleh mereka
yang ingin mengetahui dan mempelajari bidang geodesi satelit,
l'tttlttltttltrrut I I
namun secr?lra khusus buku ir-ri dapat dipandang sebagai lrtll<tt rr;irt
bagi mahasiswa tingkat sarjana maupun paska sarjana pa<lir lrt
rusan Teknik Geodesi.'Untuk mencapai obyektif tersebut maka btrl<tr
ini distrukturkan sedemikian rupa, seperti yang dijelaskan pada
Tabel1.2.
Tabel 1.2 Struktur Buku
Bab dan Judul Obyektif dari Bab
Bab 1 PENDAHULUAN Menjelaskan ruang lingkup dan
perkembangan geodesi satelit secara
umum
Bab 2 SISTEM KOORDINAT Menjelaskan sistem-sistem koordinat
yang umum digunakan dalam bidang
geodesi satelit.
Bab 3 SISTEM WAKTU Menjelaskan sistem-sistem waktu yang
umum digunakan dalam bidang geodesi
satelit, yaitu sistem-sistem bintang,
matahari, dan atom.
Bab 4 SISTEM ORBIT Menjelaskan sistem orbit satelit serta
karakteristik pergerakan satelit dalam
orbitnya.
Bab 5 PROPAGASI SINYAL Menjelaskan karakteristik propagasi
sinyal dari satelit ke Bumi serta medium
propagasinya.
Bab 6 SLR DAN LLR Menjelaskan sistem SLR dan LLR secara
umum.
Bab 7 VLBI Menjelaskan sistem VLBI secara umum.
Bab 8 SATELIT ALTIMETR] Menjelaskan sistem Satelit Altimetri
secara umum.
Bab 9 SATELIT NAVIGASI Menjelaskan sistem satelit navigasi,
terutama GPS, secara umum.](https://image.slidesharecdn.com/1520geodesisatelit-160412154021/85/geodesi-satelit-survey-12-320.jpg)
![16 Geodesi Satelit
2.2 BENTUK DAN UKURAN BUMI
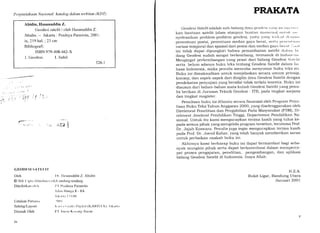
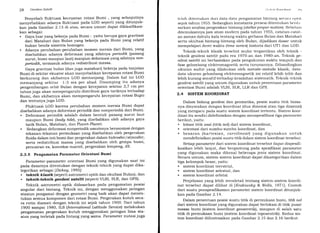
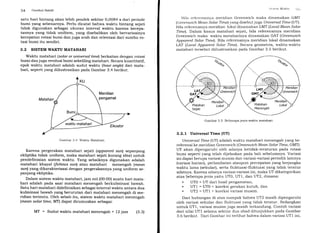
SecaraumumbentukBumimendekatiboladenganjari-jarise.
kitar63T8km.KalaudilihatSecaralebihdetail,bentukBumipada
frinsipnya agak tidak teratur. Gambar 2.1 dan2.2berikut menun-
iukkan penampang bentuk Bumi pada bidang-bidang ekuator dan
tia..rg freridian nol (meridian Greenwich)'
900 __
Barat
-r 9oo
Timur
Ellipsoid
GRS- 1 96 7
Gambar 2.1 Penampang ekuatorial dari Bumi (geoid global)' diadaptasi dari
ianicek & Krakiuskg (isao). pada Gambar ini perbedaan dengan ellipsoid
diPerbesar sekitar 10 000 kali;
a adalah sumbu Pqnjang elliPsoid'
I soo
I Utara
00
Ellipsoid
GRS- 1 96 7
| 900
'l s"ht"rt
Gambar2.2PenarnpangmeridiannoldariBumi(geoidglobal)'diadaPtasidari
Vanicek & Krakituskg (f SAO). Pada Gambar ini perbedaan dengan ellipsoid
diPerbesar sekitar 10'000 kali;
b adalah sumbu Pendek elliPsoid'
,1800
ion
Stslcrtr Kootrltttttl I t
Secara tiga-dimensi bentuk Bumi yang pada dasarnya ti<lirl< lrrr
aturan, ditunjukkan pada Gambar 2.3 berikut. Dari Gambar 2.I
dan 2.2 di atas terlihat bahwa bentuk Bumi secara matematis men-
dekati ellipsoid biaksial dimana penampang ekuatorialnya beru-
pa lingkaran dan penampang meridiannya berupa ellips. Pada Gam-
bar di atas, Bumi diwakili dengan geoid global, dimana geoid sen-
diri adalah bidang ekuipotensial gaya berat Bumi yang mendekati
muka laut rata-rata secara global.
Kutub
Utara -_-
/v]
Eedan
Propiosi
JLIFi
Fer pusra kaan
Jawa Timur
Gambar 2.3 Geoid global dari EGM96 (Earth Geoid Model 1996);
courtesy of Kosasih Prijatna. O",rr1%3fi3,1an dari Bumi diperbesar sekitar
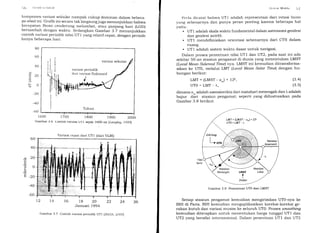
Berkaitan dengan ukuran ellipsoid yang digunakan untuk
merepresentasikan Bumi, sesuai dengan perkembangan ilmu pe-
ngetahuan dan teknologi dari pengamatan Bumi, telah dikenal be-
berapa ellipsoid referensi, seperti yang ditunjukkan pada Tabel 2.1
berikut. Pada Tabel ini a dan b adalah panjang dari sumbu pan-
jang dan sumbu pendek ellipsoid, dan f adalah penggepengan dari
ellipsoid, yang dihitung dari a dan b sebagai berikut:
f = (a-b) /a (2.r)
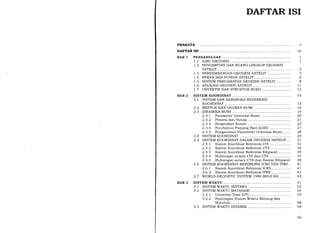
Dari Tabel 2.1 terlihat bahwa secara umum untuk ellipsoid referen-
si yang merepresentasikan Bumi, a = 6378 km, b = 6357 km, dan f
= t 12e8.](https://image.slidesharecdn.com/1520geodesisatelit-160412154021/85/geodesi-satelit-survey-14-320.jpg)
![18 Geodesi Satelit
Tabel 2.1 Beberapa Ellipsoid
fSmith, 1997; Morienbruck &
Referensi
Gilt,2oool.
Tahun Nama a (m) b (m) Ut
1830
1830
1841
1858
1866
1880
1907.
1909
L927
L948
1960
1960
L966
1967
1969
t972
r973
1980
1980
1981
1984
1990
t992
Airy
Everest
Bessel
Clarke
Clarke
Clarke
Helmert
Hayford
NAD-27
Krassovslgr
Hough
Fischer
wGS-66
IUGG
S.American
WGS.72
Smithsonian
International
GRS-80
GEM-1OB
wGS-84
w-90
GEM-T3
6 377 563
6 s77 276
6 377 397
6 378 294
6 378 206
6 378 249
6 378 200
6 378 388
6 378 206.4
6 378 245
6 378 270
6 378 15s
6 378 t45
6 378 160
6 378 160
6 378 135
6 378 L40
6 378 t37
6 378 r37.O
6 378 138
6 378 t37
6 378 136
6 378 r37
6 356 257
6 356 075
6 356 079
6 356 618
6 356 584
6 356 515
6 356 818
6 356 9t2
6 356 9t2
6 356 863
6 356 794
6 356 773
6 s56 760
6 356 775
6 356 774
6 356 751
6 356 755
6 356 752
6 356 752
6 356 753
6 356 V52
6 356 751
6 356 752
299,325
300,802
299,r53
294,26L
294,978
293,466
298,300
297,OOO
294,9786982
298,300
297
294,3
298,25
298,247
298,25
298,26
298,256
298,257
298,257222tO1
298,257
298,257223563
298,257839303
298,257
Secara umum deviasi permukaan ellipsoid (geosentrik) dengan per-
mukaan geoid (MSL = Mean Sea Leue[) lebih kecil dari 100 m; dan
deviasi permukaan geoid sendiri dengan permukaan Bumi lebih kecil
dari 10 km, seperti yang ditunjukkan pada Tabel2.2.
Tabel 2.2 Deviasi antar beberapa bidang perepsentasi Bumr
[Vanicek & Krakiwskg, 1986].
Deviasi
maksimum(m)
Rasio terhadap sumbu panjang
Bumi (a = 6378 km)
Permukaan Bumi -
Geoid (MSL)
10000 1.6 . 10-'J
Geoid - Ellipsoid
(geosentrik)
100 1.6 . 10-s
Ellipsoid - Bola
(geosentrik)
10000 1.6 . 10-3
Stsfu,rtt Kortrtlrrtrtl l ,l
2.3 DINAMIKA BUMI
Pendefinisian serta perealisasian sistem-sistem koordinat reli..
rensi yang digunakan dalam bidang Geodesi Satelit umumnya me-
nuntut pemahaman yang baik tentang dinamika dari sistem Bumi
kita, baik secara internalmaupun eksternald.alam sistem luar ang-
kasa.
, Dinamika pergerakan Bumi mempunyai spektrum yang sangat
luas, dari skala galaksi sampai skara pe.g.."k.., tot<aipaia kerak
burni, yaitu:
' Bumi bergerak bersama galaksi kita relatif terhadap galaksi-
galaksi yang lain,
. Bumi berputar bersama sistem matahari kita di dalam
kita,
' Bumi mengorbit mengelilingi matahari bersama planet-planet
lainnya,
. Bumi berputar terhadap sumbu rotasinya, dan
' kerak-kerak bumi juga bergerak (relatif sangat lambat) relatif satu
terhadap lainnya.
Tiga jenis pergerakan bumi yang terakhir tersebut di atas, ber-
pengaruh dalam pendefinisian sistem koordinat yang digunakan
dalam geodesi satelit.
- Bumi mengelilingi Matahari dalam suatu orbit yang berbentuk
ellips, dengan sumbu panjang sekitar r4g,6juta km dln eksentri-
sitas orbit sekitar o,0167, sepertiyang diilustrasikan pada Gambar
2.4 berikut ini. Periode orbitnya adalah sekitar 36s,24 hari dengan
kecepatan Bumi dalam orbit tersebut adalah sekitar 29,g km/d;tik
fYoder, 19951.
galaksi
3 Januari
Pe rihelion
3 Juli
Aphelion
Gambar 2.4 Pergerakan Bumi mengelilingi Matahari;
diadaptasi d,ari lVanicek & Krakiu.tskg, t986l.
y (Vernal Equinox)](https://image.slidesharecdn.com/1520geodesisatelit-160412154021/85/geodesi-satelit-survey-15-320.jpg)
![20 Geodesi Satelit
Pada saat Bumi bergerak mengelilingi Matahari, Bumi juga ber-
putar terhadap sumbu iotasinya. perputaran Bumi terhadap sumbu
iotasinya ini mempunyai spektrum dinamikayang relatif luas, dan
dijelaskan secara umum pada sub-sub bab berikut ini'
2.9.1 Parameter Orientasi Bumi
Dalam pendefinisian dan realisasi sistem koordinat ada bebera-
p" p"."r.r"ter orientasi Bumi yang perlu diperhatikan, yaitu:
. p.rg.r"kan sumbu rotasi bumi dalam ruang inersia (Presesi dan
Nutasi),
p.rg".^k^r, sumbu rotasi bumi relatif terhadap kerak bumi
(pergerakan kutub), dan
iiukluasi dalam kecepatan rotasi bumi [perubahan panjang hari
(LOD, length of dagll.
-Gaya-gaya yang mempengaruhi rotasi bumi pada dasarnya da-
pat dikelomPokkan atas:
' gaya gravitasional dari benda-benda langit lainnya,
o gala tekan (loadingl atmosfer dan air laut, serta
. f,.igerakt., *"""" baik di dalam bumi, daratan, lautan' dan
atmosfer, maupun pergerakan dari lempeng-lempeng Bumi'
Gambar 2.5 berikut mengilustrasikan gaya-gaya yang dapat
mempengaruhi gerakan rotasi Bumi'
Air Laut
i
Tekanan
,l
- l.t
Pencairan Es
Konveksi
Tekanan
Atmosfhr
AnSm,
Plume
t Air per-
mukaan
Gempa
Bumi
Gaya tarik
Matahari
& Bulan
Arus
Laut
Gambar 2.5 Gaya-gaya yang mempengaruhi rotasi Bumi; diadaptasi dari
lDickeg, 19951.
SLsletr Koortltrtttl ') I
2.3.2 Presesi dan Nutasi
Kalau dilihat dalam sualtr ruang inersia, sumbu rotasi butrrr
dan bidang ekuator bumi tidaklah tetap, melainkan bergerak yang
sifatnya rotasional. Pergerakan sumbu rotasi bumi dalam ruang
ini merupakan respon dari ketidak simetrian dan non-rigiditas dari
bumi terhadap gaya tarik bulan, matahari, dan planet-planet; dan
juga dari moda rotasi bumi yang bebas itu sendiri. Pergerakan to-
tal dari surnbu rotasi bumi dalam ruang ini mempunyai dua kom-
ponen utama, yaitu:
. komponen sekular (dinamakan Presesi), dan
. komponen periodik (dinamakan lVutasi).
seperti yang ditunjukkan pada Gambar 2.6 berikut.
presesr
dan nutasi
- * Presesr
^'r-$]...""""""
"""'...
,59"oY
-
-^ co ---YlorY.'
/ -ir
/'
:---ta,6 thn Sumbu
Rotasi
Bumi
€}li
Ekua
o
"y
tor
Brf"
Gambar 2.6 Fenomena Presesi dan Nutasi, d,ari fTorge, l98Ol.
Gerakan presesi dari sumbu rotasi Bumi disebabkan oleh gaya
gravitasi benda-benda langit pada tonjolan ekuator Bumi, terutama
Matahari dan Bulan. Karena dalam pergerakannya mengelilingi
Matahari bidang ekuator Bumi membentuk sudut sebesar 23,50
terhadap bidang ekliptika (bidang edar Bumi mengelilingi Mata-
hari), maka gerakan presesi ini mempunyai amplitudo sudut sebe-](https://image.slidesharecdn.com/1520geodesisatelit-160412154021/85/geodesi-satelit-survey-16-320.jpg)
![22 Geodesi Satelit
sar 23,50. Presesi mempunyai periode yang relatif sangat panjang,
yaitu sekitar 25800 tahun. Akibat adanya presesi, titik semi (uer-
nal equinoxl yang merupakan titik potong antara bidang ekuator
dan bidang ekliptika bergerak sepanjang ekliptika dengan laju se-
kitar 50,4" per tahun.
Komponen pergerakan sumbu rotasi Bumi yang bersifat perio-
dik, yaitu nutasi, mempunyai beberapa periode, mulai dari 4 hari,
setengah bulan, satu bulan, setengah tahun, satu tahun, sampai
18,6 tahun [F.Gg 1998; Dickeg, 1995]. Periode utam{ dari nutasi
adalah 18,6 tahun, seperti yang ditunjukkan pada Gambar 2.6,
dengan amplitudo sudut sekitar 9,2". Fenomena Nutasi ini pertama
kali ditemukan oleh James Bradley dari data pengamatan bintang
selama 2O tahun yang dilakukannya pada periode 1727 sampai
1747 lSmith,19971.
Terjadinya nutasi dapat dijelaskan secara singkat sebagai beri-
kut. Dalam pergerakannya mengelilingi Bumi, bidang orbit Bulan
membentuk sudut sebesar 5011' terhadap bidang ekliptika (bidang
orbit Bumi dalam mengelilingi Matahari), seperti yang ditunjukkan
pada Gambar 2.7. Perpotongan antara bidang orbit Bulan dengan
bidang ekliptika dinamakan garis nodal. Karena gaya tarik Mata-
hari mempengaruhi orbit Bulan, garis nodal ini berputar dalam
ruang inersia dengan periode sekitar 18,6 tahun. Adanya inklinasi
orbit Bulan dan perputaran garis nodal ini akan menyebabkan ter-
jadinya variasi gaya tarik antara Bumi dan Bulan, dan juga dengan
Matahari, yang bersifat periodik. Variasi ini selanjutnya mempe-
ngaruhi gerakan total dari sumbu rotasi Bumi dalam ruang, dan
menyebabkan gerakan periodik tambahan yang dinamakan nutasi.
Orbit Bulan
501 1'
Titik
Naik
Gambar 2.7 Orbit Bulal
Ekliptika
Si.slcrn Koorrlrlill :, I
Selama periode nodal Bulan, yaitu sekitar 18,6 tahun, nulrrnr
menyebabkan pergeseran periodik dari titik semi sebesrrr
lMontenbntck & Gilt, 20001 :
Ay x =l7,2OO".sin(O*) (2.21
serta perubahan dari kemiringan bidang ekliptika terhadap ekuator
Bumi sebesar:
Ae N +9,203".cos(O_) (2.3)
dimana O- adalah bujur' dari titik naik Bulan.
Perlu ditekankan bahwa komponen pergerakan sumbu rotasi
Bumi dalam rt.ang ini, yaitu presesi dan nutasi, dapat diformulasi-
kan secara matematis. Formulasi matematis untuk presesi dan
nutasi bisa dilihat di Montenbruck & Gill (2000). Gambar 2.8 me-
nunjukkan presesi dan nutasi hasil hitungan serta hasil pengamat-
an. Gambar ini menunjukkan bahwa gerakan nutasi yang sebe-
narnya juga mempunyai komponen-komponen periodik lainnya,
yang periode dan amplitudonya relatif lebih kecil. Menurut Dickeg
(1995), komponen-komponen yang lebih kecil ini merupakan efek
dari adanya deformasi dan dinamika dari Bumi, mulai dari inti
sampai dengan atmosfer Bumi.
9.8"
9.4"
9.O"
8.6"
8.2"
-1.8" -1.4" -1.O" -0.6" -O.2 0.2
Gerakan ld.eal Gerakan Sebenanr;ga
Gambar 2.8 Karakteristik Gerakan Presesi dan Nutasi,
diadapsi dari lVonicek & Krokiutsky, 1986l.
2.3.3 Pergerakan Kutub
Pergerakan kutub Qtolar motionl adalah pergerakan sumbu ro-
tasi bumi relatif terhadap badan atau kerak bumi sendiri. Tidak](https://image.slidesharecdn.com/1520geodesisatelit-160412154021/85/geodesi-satelit-survey-17-320.jpg)
!['24 Gt:orlesi Satelit
seperti halnya presesi dan nutasi, parameter pergerakan kutub tidak
dapat dijelaskan secara teoretis (analitis), tapi harus ditentukan
melalui observasi langsung.
Pergerakan kutub, seperti yang divisualisasikan pada Gambar
2.9, pada dasarnya mempunyai tiga komponen utama yaitu [/ERS,
20001:
. Osilasi bebas yang punya periode sekitar 435 hari (umum
dinamakan periode Chandler). Gaya penyebab dari osilasi ini
belum diketahui secara jelas. Diperkirakan osilasi ini merupakan
respon dari elastisitas (non-igidity) dari Bumi terhadap dinamika
atmosfer, redistribusi air tanah, dan juga mungkin gempa-gempa
Bumi lDickey,1995l.
. Osilasi tahunan yang disebabkan terutama oleh adanya
perpindahan massa air (air laut dan air tanah) dan udara yang
bersifat musiman (seasonall.
. Komponen sekular yang berupa pergeseran (dift) dari kutub
menengah ke arah meridian 800 Bujur Barat, seperti yang
ditunjukkan pada Gambar 2.9. Variasi sekular ini mempunyai
amplitudo sekitar 0,002" - 0,003" per tahun, dan diperkirakan
penyebabnya terkait dengan pergerakan tektonik.
Pergerakan kutub juga mempunyai variasi harian (diurnal) dan
setengah-harian (semi diurnat) dengan amplitudo fraksi dari mas
(milidetik dari busur), dan variasi ini disebabkan oleh pasang su-
rut laut.
Gerakan Kutub
1995 - 1998
-o.2
Maret
1998 r.
+o.4
Kutub
IERS
+O.2
Pergeseran (drlfi)
I{utub Menengah
7900 - 1994
Gambar 2.9 Pergerakan kutub (1995.1998) dan
pergeserannya ( 1 900 - 1 998), diadapsi dari IIERS, 2000]
LJ
F1
o
o
')!'
Pengamatan pergerakan kutub sudah dimulai sejak tahur-r lttt)o,
-yaitu dengan pengamatan lintang secara simultan menggunakatt
metode astronomi geodesi di empat lokasi pengamatan di Eropa,
yaitu Potsdam, Berlin, Prague, dan Strasbourg [FGS, 1998]. Gam-
bar 2.10 dan 2.11 berikut menunjukkan dekomposisi dari kompo-
nen koordinat kutub x dan y, sejak tahun 1890, ke dalam kompo-
nen-komponen sekular, tahunan (musiman), dan Chandler.
lit:;lt, ttt Koot t I t ttt tl
+O.4"
ncKutu llrerl0l
", | rurllnrmuillililiililmrnu-*^,.-*rMlru
;f ilUumUfrl,uurrrrnl,
l,i t fi,p6',--l^"',---^^-^
1900 1920 1940 1960 1980
Gambar 2.1O Variasi temporai komponen-x dari koordinat kutub UERS,2O00l.
.oo'I
t
t
t
t
-o..'I
+0.2'
I
L
t.o.2" I
+O-1'r
L
-nfL
+o.1"r 11.,,, , Residu
:,: r
1900 t920 t940 1960 1980 2000
dari koordinat kutub UER.S,2000lGambar 2.11 Variasi temporal komponen-y](https://image.slidesharecdn.com/1520geodesisatelit-160412154021/85/geodesi-satelit-survey-18-320.jpg)
![32 Geodesi SateLit
dan CTS dapat dilihat di lMoitz and Mueller, 19871, dan tentang
sistem referensi Ellipsoid di lTorge, 19801.
2.S.LSistem Koordinat Referensi CIS
cIS (conuentionrtl Inertial sg stem), sistem koordinat referensi yang
teikatlangit, dalam geodesi satelit digunakan untuk pendeskripsi-
an posisi dan pergerakan satelit. sistem koordinat ini tidak berota-
si dengan Bumi, tetapi ikut berevolusi bersama Bumi mengelilingi
Matahari. Sistem referensi koordinat ini diilustrasikan pada Gam-
bar 2.17, d.an mempunyai karakteristik dasar sebagai berikut:
. Titik Nol sistem koordinat adalah pusat Bumi (earth-centred)
dan sumbu-sumbu sistem koordinatnya terikat ke langit
(space-fixed).
. Sumbu-X mengarah ke titik setc,:.i (uernal equinoxl pada epok
standar J2OO0.0 dan terletak pada bidang ekuator Bumi.
. Sumbu-Z rnengarah ke CEP pada epok standar J2OOO.O. CEP
(ConuentionalEphemeis Polel adalah posisi bebas di langit dari
sumbu rotasi Bumi.
. Sumbu-Y tegak lurus sumbu-sumbu X dan Z, dar. membentuk
sistem koordinat tangan kanan (right-handed sgsteml.
Surnbu-Z
CEP J2OOO.O
Bidang Dkliptika
Sumbu-Y
Bidang
Ekuator
Titik Semi (Vernal Equinox)
Gambar 2.17 Sistem Koordinat Referensi CIS
Pengikatan sumbu-sumbu sistem koordinat CIS ke langit dapat
dilakukan terhadap beberapa benda langit, antara lain:
. Sumber gelombang radio ekstra-galaktik seperti kuarsar.
Dalam hal ini CIS dapat direalisasikan dengan metode VLBI,
dan CIS yang bersangkutan dinamakan radio-ClS.
Sumbu-X
tt
. [Jintang-bintang, seperti yang diberikitrr olclr l<rrIrrl,,,. IrrrrIirrrt,
FK5. Dalam hal ini CIS d .rat direalisrrsrl<irrr (l(.nl.,rrr
pengamatan bintang, dan CIS yarrg bersangktrtirrr rIrIrrrrrirkirrr
stellar-CIS.
. Planet maupun satelit artifisial bumi. Dalam hal ini CIS <lapirl
direalisasikan dengan metode pengamatan astrometri, LLR,
SLR, Doppler, GPS, Glonass, dan CIS yang bersangkutan
dinamakan dgnamical-ClS.
Gambar 2.18 berikut menunjukkan beberapa mekanisme reali-
sasi CIS sebagai fungsi dari target, teknik, dan stasiun bumi yang
digunakan.
TARGI,]T TEKNII( S'I'ASITIN BT]NII
Gambar 2.18 Hubungan antara beberapa realisasi CIS
lDickeg, r9a9l.
Pada sistem CIS ini koordinat bisa dinyatakan dengan besaran-
besaran j ar ak (X,Y,Z), atau pun besaran-be saran sudut (cr,6), dimana
a adalah sudut asensio rekta dan d adalah sudut deklinasi, seperti
yang ditunjukkan pada Gambar 2.19. Sistem kartesian (X,Y,Zl bia-
sanya digunakan untuk mendeskripsikan posisi satelit yang relatif
dekat dengan permukaan Bumi, dan sistem asensiorekta (cr,6) umum
digunakan untuk mendeskripsikan posisi obyek yang relatif jauh
dari permukaan Bumi seperti bintang dan kuasar.](https://image.slidesharecdn.com/1520geodesisatelit-160412154021/85/geodesi-satelit-survey-22-320.jpg)
![36 Geodesi Satelit
tunjukkan pada Gambar 2.15 sebelumnya. Kedua koordinat ini
dapat.saling ditransformasikan satu dengan lainnya, dengan meng-
gunakan formulasi matematis berikut fSeeber, 1993]:
Ellipsoid
(2.7)
Pada rumus di atas, R* dan e adalah jari-jari kelengkungan ver-
tikal dan eksentrisitas ellipsoid referensi, yang keduanya dapat di-
hitung sebagai berikut:
Gambar 2.21 Sistem Koordinat Referensi
(x) ( (R* * h). cos<p.cosl" )
I
"
l= I (R* + h). cos.p.sinr' I
lr) [{{, -
"')**
+ h). sin<pJ
, a2 -b2
,v-l
a' (2.81
dimana a dan b adalah setengah sumbu panjang dan setengah
sumbu pendek dari ellipsoid referensi yang digunakan.
Dari rumus (2.7) terlihat bahwa transformasi dari (X,Y,Zl ke (9,1",h)
tidak dapat dilakukan secara langsung seperti halnya dari (9,),,h)
ke (X,Y,Z), karena persamaannya tidak linear. Teknik dan algorit-
ma yang dapat digunakan untuk menyelesaikan proses transfor-
masi yang tidak linear tersebut telah banyak diajukan, dan bebe-
rapa diantaranya diberikan pada Lampiran I.
pu sat
ellipsoid
Sumbu-Y
bidang
Si:;lt,tttKtxtrtltrtttl .l'/
2.5.4 Hubungan antara CIS dan CTS
Sistem-sistem koordinat CTS dan CIS dapat ditransformasikan
antarsesamanya dengan menggunakan besaran-besaran presesi,
nutasi, gerakan kutub dan rotasi bumi. Hubungan antara kedua
sistem koordinat tersebut dapat diilustrasikan secara geometris
seperti pada Gambar 2.22 berikut.
CEP J2OOO.O
Presesi & Nutasi
Gerakan Kutub
meidian
Greenwich
Rotasi Bumi
titik semi
(vemal
GAST = Greenwich Apparent
Sidereal Time
Gambar 2.22 tlubungan antara CIS dan CTS
Seandainya koordinat suatu titik dalam kedua sistem
sebagai:
X",, : ()(t,Yrzt)
X"r. = (),Y.r,Zr)
maka transformasi antara keduanya dirumuskan sbb.:
X"r. = M.S.N.P. Xcrs
dimana:
M
S
N
P
XI
-tx,
dinyatakan
(2.e)
(2.10)
(2.11)
= matriks rotasi untuk gerakan kutub (polar motionl
= matriks rotasi untuk rotasi blumi (earth rotation)
= matriks rotasi untuk nutasi (nutation)
= matriks rotasi untuk presesi Qtrecessionl
Struktur dari matriks M, S, N, dan P dapat dilihat dilMontenbruck
& GiU,2OO0]. Elemen-elemen dari keempat matriks ini umumnya
merupakan besaran-besaran yang nilainya berubah dengan waktu.
z k-LLf](https://image.slidesharecdn.com/1520geodesisatelit-160412154021/85/geodesi-satelit-survey-24-320.jpg)
![38 Geodesi Satelit
Transformasi koordinat dari sistem CIS ke CTS ini dapat diilus-
trasikan. tahapan-tahapan seperti yang ditunjukkan pada Gambar
2.23 berikut.
CEP pada epok sebenarnya
2
W r-;-ffi
| *"rgurr:h ke titik semi !-tnot""r Bumil)+l iendian Greenwich ffi
@ @
Gambar 2.23 Step Transformasi dari CIS ke CTS.
2.5.5 Hubungan antara CTS dan Sistem Ellipsoid
Hubungan antara sistem koordinat CTS dan sistem Ellipsoid
secara umum ditunjukkan pada Gambar 2.24. Dalarn hal ini titik
nol kedua sistem dapat berbeda, seperti halnyajuga orientasi dari
sumbu-sumbu koordinatnya. Karena dalam sistem Ellipsoid, koor-
dinat suatu titik dipengaruhi oleh ukurari dan bentuk dari ellip-
soid, maka perbedaan skala antara kedua sistem mungkin saja
tedadi.
4z
- ----(_
,-
YT
YE
Za
Gambar 2.24 Ilubungan antara sistem CTS dan sistem Ellipsoid.
.Sr.sk,rrKoorrlttrrr, .lal
Kalau koordinat suatu titik dalam sistem CTS dan sistem Ellilr
soid dinyatakan sebagai:
dan koordinat titik nol
merupakan kompqnen
sebagai;
YT' ZTI
Yr, Zrl
sistem Ellipsoid
translasi antara
(2.12l.
(2.13)
dalam sistem CTS, yang
kedua sistem, dinyatakan
X... = (4,
4, = (X,,
xo {xo,Yo, zol (2.r4l,
dan (e*, ev, e,) mendefinisikan sudut-sudut rotasi mengelilingi sumbu-
sumbu (X,Y,Zl yang diperlukan untuk mengimpitkan arah-arah
sumbu X, Y, dan Z dari sistem Ellipsoid dalam ruang dengan arah
sumbu-sumbu sistem CTS, maka koordinat dari kedua sistem dapat
dihubungkan dengan menggunakan hubungan matematis berikut:
X.r. = Xo r s. R,(e*).RrGJ.Ra(e,).X",,
dimana s adalah faktor skala, dan R adalah matriks rotasi yang
dapat diformulasikan sebagai berikut lKrakiwskg & Wells, l97ll:
0 -sin0
10
0 cos0
(2.16)
[r o ol [co.o
R,(0)=10 cos0 sin0 l,R,(0)=l 0
[o -sin o "o"o ] [.ino
[
"o.0 sin 0 0l
I olR.(0)=l-sin0 cos0
I
L0 0 rl
(2.1s)
(2.17l.
antara CTS dan sis-
suatu datum geode-
Per1ir dicatat bahwa untuk sudut-sudut rotasi (t*, er, t,) yang
kecil, maka persamaan (2.15) dapat dituliskan dalam bentuk akhir-
nya sebagai berikut:
til [i]."[,:
':
i] til
Perlu ditekankan di sini bahwa hubungan
tem Ellipsoid pada dasarnya mendefinisikan](https://image.slidesharecdn.com/1520geodesisatelit-160412154021/85/geodesi-satelit-survey-25-320.jpg)
![40 Geodcsi SuteLtt
tik. Datum geodetik adalah sejumlah parameter yang digunakan
untuk mendefinisikan bentuk dan ukuran ellipsoid referensiyang
digunakan untuk pendefinisian koordinat geodetik, serta keduduk-
an dan orientasinga dalam ruang terhadap tubuh Bumi yang da-
lam hal ini direpresentasikan oleh sistem CTS.
Dari Gambar 2.24 terlihat bahwa akan ada 8 parameter dari
suatu datum geodetik, yaitu :
. dua parameteryang mendefinisikan bentuk dan ukuran ellipsoid
referensi, yaitu a dan f,
. tiga parameter translasi, yaitu (X",Y o,Zol yang mendefinisikan
koordinat titik pusat ellipsoid terhadap pusat Bumi, dan
. tiga parameter rotasi, yaitu (e*,e",e,) mendefinisikan arah-arah
sumbu X, Y, dan Z ellipsoid dalam ruang terhadap sumbu-sumbu
Bumi yang diwakili oleh sumbu-sumbu X,Y dar, Z dari sistem
CTS.
Disamping pendefinisian terhadap suatu sistem yang geosen-
trik, datum geodetik juga dapat dinyatakan terhadap suatu sistem
yang sifatnya toposentrilc, seperti yang diilustrasikan pada Gam-
bar 2.25.
(€o,no)
No
YE
P = Titik
Datum
Gambar 2.25 Contoh parameter datum geodetik
(pendekatan toposentrik)
Pada pendefinisian datum dengan pendekatan toposentrik ini, 8
parameter datum geodetik adalah:
. dua parameteryang mendefinisikan bentuk dan ukuran ellipsoid
referensi, yaitu a dan f,
. tiga parameter translasi, yang dalam hal ini diwakili oleh dua
parameter defleksi vertikal ((o,qo) dan undulasi geoid (No) di titik
datum, dan
ZE
.tslr'rrr Krtrrrrlurrrl
. tiga parameter rotasi, yang dalam hal ini diwakili oleh koorclinal
geodetik di titik datum (9o,l.o) dan asimut geodetik dari titik datum
ke suatu titik awal oo.
Perlu dicatat dalam ha1 ini bahwa cukup umum dalam pendefi-
nisian datum secara toposentrik, ellipsoid referensi yang diguna-
kan diimpitkan dan dibuat sejajar dengan geoid di titik datum, yaitu
dengan mengadopsi hubungan berikut:
No= (o= tto: O (2.18)
2.6 SISTEM KOORDINAT REFERENSI ICRS DAN ITRS
ICRS (.International Celestial Reference Sgstem) dan ITRS (Inter-
national Terrestial Reference System) adalah sistem-sistem refe-
rensi koordinat yang pada prinsipnya analog dengan CIS dan CTS,
yaitu ICRS adalah sistem terikat langit dan ITRS adalah sistem
terikat Bumi.
2.6.L Sistem Koordinat Referensi ICRS
Sejak 1 Januari 1998, IAU (International Astronomical Union)
menetapkan ICRS sebagai sistem referensi selestial yang standar,
sebagai pengganti sistem referensi FK5. Karakteristik dari sistem
referensi ICRS adalah UERS, 2000]:
. Titik Nol sistem koordinat adalah pusat massa (barycenter)
dari sistem Matahari dalam kerangka relativitas.
. Sumbu-X mengarah ke titik semi (uernal eqtinoxl dari IERS.
Dalam hal ini nilai nol dari asensiorekta ditetapkan dari nilai
asensiorekta kuasar 3C 2738.
. Sumbu-Zrnengarah ke CEP dari IERS yang didefinisikan oleh
model konvensi dari IAU.
. Sumbu-Y tegak lurus sumbu-sumbu X dan Z, dan membentuk
sistem koordinat tangan- kan an (ig ht-hande d sg stem) ; dimana
sumbu-sumbu X dan Y terletak pada bidang ekuator menengah
(mean eqtatofl Bumi pada epok J2OOO.O.
Lokasi kutub CEP dari sistem ICRS relatif terhadap kutub FK 5
dan J20O0.O ditunjukkan pada Gambar 2.26. Sedangkan lokasi
titik nol asensiorekta dari ketiga sistem ditunjukkan pada Gambar
2.27 . Dalam hal ini kutub ICRS mempunyai tingkat presisi sekitar,
O, 1 mas, dan titik seminya sekitar 10 mas.
Sistem ICRS direalisasikan dengan suatu set kuasar yang
koordinatnya ditentukan dengan metode VBBI. Kerangka
koordirratnya dinamakan ICRF (International Celestial Reference
Framel dan terdiri dari 608 kuasar yang tersebar secara merata di
.il](https://image.slidesharecdn.com/1520geodesisatelit-160412154021/85/geodesi-satelit-survey-26-320.jpg)
![42 Geodesi Satelit
langit, dan diturunkan dari sekitar 1,6 juta pengamatan dari jaring-
an observatori di seluruh dunia dalam periode 1979-1995. Koordi-
nat dari quasar ini diberikan dalam sistem ekuatorial asensiorekta
yaitu dengan komponen koordinat asensiorekta dan deklinasi.
utu
8h
-20
mas
FK5 r ICRS
20 mas
oh
Gambar 2.26 Posisi relatif dari kutub sistem ICRS UER$ 20001
or.rs FKs
Elanator
J2000.o
l--.H
[00 mas
ICRS Asensiorekta
Gambar 2.27 Posisi relatif dari titik nol asensiorekta sistem ICRS IIERS, 2000]
Kuasar yang membangun kerangka referensi ICRF mempunyai
kualitas koordinat yang variatif, karena adanya perbedaan dalam
sejarah dan strategi pengamatannya, maka kuasar dari ICRF dika-
tegorikan dalam 3 kelas yaitu [/ERS, 2000]:
. kelqs penentu yang terdiri dari 212 kuasar berkualitas tinggi
yang digunakan untuk mendefinisikan sumbu-sumbu ICRF.
Tingkat presisi (median) dari posisi kuasar dalam kelas ini adalah
sekitar 0,4 mas.
. kelas kandidat (candidate) yang terdiri'dai 294 kuasar, dimana
sebagiannya mempunyai jumlah atau durasi pengamatan yang
kurang memadai, dan sebagiannya mempunyai tingkat presisi
yang relatif lebih rendah. Kuasar pada kelas ini mungkin naik ke
kelas penentu di kemudian hari.
.Sl.slr:rr Krlorrlurrrt ,l .l
. kelc,s lainnga (other sources) yang terdiri dari 102 kuasar -yitttg
diidentilikasikan mempunyai variasi posisi yang relatif besar, baik
sistematik maupun random. Kuasar ini dimasukkan dalam
kerangka ICRF untuk merapatkan jaringan atau mereka
berkontribusi dalam pengikatan ke kerangka optis.
Sebaran dari 608 kuasar yang membangun ICRF diiilustrasikan
pada Gambar 2.28. Dari Gambar ini terlihat bahwa distribusi dan
kepadatan kuasar cukup merata untuk semua belahan langit.
Gambar 2.28 Kerang_l;?::J.T.1terdiri atas 608 kuasar
2.6.2 Sistem Koordinat Referensi ITRS
ITRS pada prinsipnya adalah sistem CTS yang didefinisikan,
direalisasikan dan dipantau oleh IERS (International Earth oienta-
tion systeml. secara umum karakteristik dari sistem koordinat ITRS
adalah sebagai berikut (IER$ 2000):
. Sistem geosentrik, dimana pusat massanya didefinisikan untuk
seluruh Bumi, termasuk lautan dan atmosfer.
. Unit panjang yang digunakan adalah meter.
. Sumbu-Zmengarah ke kutub CTPyang dinamakan IRP (IERS
Reference Polel.
. Sumbu-X berada dalam bidang meridian Greenwich yang
dinamakan IRM (/ERS Reference Meridianl dan terletak pada
bidang ekuator Bumi.
. Sumbu-Y tegak lurus dengan sumbu-sumbu X dan Z dan
membentuk sistem koordinat tangan kanan.
. Evolusi waktu dari orientasi sistem koordinat dipastikan
dengan menerapkan kondisi no-net'rotatlon dalam konteks
pergerakan tektonik (horisontal) untuk seluruh permukaan
Bumi.
Dibandingkan dengan orientasi yang didefinisikan oleh BIH pada
1984.0, perlu dicatat beberapa hal sebagai berikut [IERS,2OOO] :
-"--E---
.o.i](https://image.slidesharecdn.com/1520geodesisatelit-160412154021/85/geodesi-satelit-survey-27-320.jpg)
![Cieod.esi. Satelit
Kutub IRP IERS Reference Pole) dan meridian nol IRM //ERS
Reference Meridian) mempunyai tingkat konsistensi dengan
arah-arah BIH pada level sekitar 0,005'.
Kutub CTP dari BIH didekatkan ke CIO pada tahun 1967, dan
sejak itu dijaga tingkat kestabilannya secara independen
sampai 1987.
. Tingkat presisi ikatan antara IRP dan CIO adalah sekitar 0,03"
Sistem ITRS direali sasikan den gan ko or dinat dan ke cep atan dari
sejumlah titik yang tersebar di seluruh permukaan Bumi, dengan
menggunakan metode-metode pengamatan VLBL, LLR, GPS, SLR,
dan DORIS. Kerangka realisasinya dinamakan IIRF (International
Terrestial Reference Framel. Kerangka ini juga terikat dengan ke-
rangka ICRF melalui pengamatan VLBL
Pada saat ini kerangka ITRF terdiri dari sekitar 3OO titik di per-
mukaan Bumi, yang mempunyai koordinat dengan ketelitian sbki-
tar 1-3 cm serta kecepatan dengan ketelitian sekitar 2-8 mrr,lta-
hun. Titik-titik ITRF ini terdapat pada semua lempeng tektonik uta-
ma serta hampir semua lempeng-lempeng yang kecil. Lokasi dan
distribusi dari titik-titik ITRF ini ditunjukkan pada Gambar 2.29,
berikut batas dari lempeng-lempeng tektonik yang utama.
Gamtrar 2.29 Distribusi titik-titik ITRF (1ERS,20001
Pada saat ini, jaring kerangka ITRF dipublikasikan setiap ta-
hunnya oleh IERS, dan umumnya diberi nar[a ITRF-yy, dimana yy
menunjukkan tahun terakhir dari data yang digunakan untuk
menentukan kerangka tersebut. Sdbagai contoh, ITRF94 adalah
kerangka koordinat dan kecepatan yang dihitung pada tahun 1995
dengan menggunakan semua data IERS sampai akhir 1994.
Stsl('il| Koordln(tl
Akhirnya perlu ditekankan bahwa koordinat titik dalam suitltt
kerangka IT{F tertentu juga dapat dihubungkan dengan koordinat
dalam kerangka ITRF lainnya atau kerangka koordinat lainnya se-
perti wGST 2- dan wGS 84. Seandainya hubungan transformasi an -
iara kedua kerangka koordinat (xt,Y rzt dan (,Y,Zr) diformula-
sikan sebagai:
+ e,l [x,
-e, I I Y,
."]Lr,ly,);;.].[:i;
-t3
+S
*tr
f.4
Bada n
Pt,rprn5i
maka parameter-parameter transformasi antara beberapa kerangka
IIRF mempunyai nilai seperti yang diberikan pada Tabel 2'3'
Tabel 2.3. Pararneter transformasi antara kerangka referensi ITRF
dan beberapa kerangka lainnya, dari lMontenbruck & Gill,2000].
Dari Ke xo
(cm)
Yo
(cm)
zo
(cm)
S
(10')
tr
(0,001')
Ez
(o,o01")
ta
(0,001
ITRF9O
ITRF9O
ITRFgO
ITRFg4
ITRF94
ITRFg4
ITRFg4
ITRF94
WGS72
WGS84
ITRF88
ITRF88
ITRF9O
ITRF92
wGS84*
wcs84"
+ 6,0
+ 6,0
+ 0,0
+ 1,8
+ 1,8
+ O,8
_o
+1
-51,7
-5L,7
-t,2
+ 0,0
+ 1,2
+ o,2
+2
-1
-472,3
- 22,3
- 6,2
_oo
- 3,0
- 0,8
-1
-c
- 231
- 11
+6
+ 7,4
+ O,9
- 0,8
+ o,2
+ O,3
+ i8,3
+ 18,3
+ 0,1
+ 0, 1
+ 0,0
+ 0,0
+ 2,s
+ 0,6
- 0,3
- 0,3
o,0
0,0
o,o
o,o
+ 1,9
+ 1,2
+ 547
- 7,O
o,o
0,o
o,o
0,0
- 2,5
+ O,7
WGS84. = WGS84 (G730), WGS84" = WGS84 (G873)
2.7 WORLD GEODETTC SYSTEM 1984 IWGS 84)
WGS 84 pada prinsipnya adalah sistem koordinat CTS yang di-
definisikan, direalisasikan dan dipantau oleh.NIMA (National Imag-
ery and Mapping)Amerika Serikat' WGS 84 adalah sistem yang
""-.t
i.ri digunakan oleh sistem satelit navigasi GPS (Global Posr-
tioning sgstem). secara umum karakteristik dari wGS 84 adalah
"ep"ril
ClS, dengan beberapa karakteristik spesifik lainnya seba-
gai berikut' (NIMA, 2000):
. Sistem geosenEik, dimana pusatmassanya didefinisikan untuk
selurtrh Bumi, termasuk lautan dan atmosfer'
. skalanya adalah kerangka loka1'Bumi, dalam konteks teori
relativitas gravitasi.](https://image.slidesharecdn.com/1520geodesisatelit-160412154021/85/geodesi-satelit-survey-28-320.jpg)
![46 Geodesi Satelit
. Orientasi sumbu-sumbu X, y, dan Z nyaadalah seperti yang
ditunjukkan pada Gambar 2.30.
' Evolusi waktu dari orientasi sistem koordinat tidakmenyebabkan adanya residual dari rotasi global t"rrr"i"p kerakE Uml.
secara skematis, sistem koordinat wGS g4 ini ditunjukkan padaGambar 2.30. Arah-_ke kutub IRp pada prinsipnya sama dengan
arah ke crp dari BIH (epok 1gg4.o), dengin tingk"t k"t"riti.n seki-tar O,OO5"; dan IRM berimpit dengan -".idi.., ,rJt gtH 1.pof. f SS+.Oy
dengan tingkat ketelitian sekitar 0,005,,.
IRP
Pusat massa bumi
Y wcs sc
Xwcs s+
IRP = IERSRe.ference pole, IRM = /ERS Reference Meidian
Gambar 2.30 Sistem l(oordinat WGS g4, d,ari INIMA,2OOOI
Kerangka referensi wGS 84 direarisasikan pertama kalinya pada1987 dengan sekumpulai
llik yang koordinatnya diamaii dengansistem satelit navigasi rRANSITiDoipler). pada waktu itu kerangkadirealisasikan dengan memodifiku"i k..rr.gka referensi yang digu-nakan oleh sistem satelit Doppler (NSWC 9Z_2), yaitu'p^.._"t".pusat (titik nol) sistem koordinat dan stcatrry", sertamerotasikannya sehingga meridian referensinya b;;i"rptt denganmeridian- nol yang didefinisikan oleh BIH (Bureau International d.e
l'Heure) | DMA, 1991]. Daram hal ini n,ai parameter transformasidari datum NSWC 9_Z-2 ke WGS g4, adalah translasi dalam arahsumbu Z sebesar LZ = 4,5 m, rotasi dalam bujur Ai = O,Sl+,,, danperubahan faktor skala AS = _0,6 x 1O-6.
Sejak Januari lg87,
leknse Mapping Agencg (DMA) Amerikaserikat muiai menggunat<an wcs g+dala*m i""giit""e t.ti, ,"ti,iQtrecise ephemeis) untuk satelit TRANSIT (DoppLr). o.iit t.titi i.riselanjutnya bersama-sama dengan pengamatan Doppler diguna_
Stslt:tttKtxtnlrrrrtl,l'/
l<irn untuk menentukan posisi dari 12 stasiun penjejak GPS milik
I)oD. Keduabelas stasiun ini selanjutnya digunakan untuk menjejak
satelit GPS dalam rangka menentukan parameter orbit (brodcast
ephemeis dari satelit GPS.
Dalam rangka menyelaraskan sistem koordinat WGS 84 dengan
sistem ITRF yang lebih teliti serta banyak digunakan untuk aplika-
si-aplikasi geodetik pada saat ini, DoD telah menentukan kembali
koordinat dari L2 stasiun penjejak tersebut pada epok 1994.0. Pe-
nentuan kembali koordinat ini dilakukan dengan menggunakan data
GPS yang diamati di sepuluh stasiun tersebut serta di beberapa
stasiun penjejak IGS (/nfernation GPS Seruice for Geodgnamics), yang
dalam perhitungan ini koordinatnya dalam sistem ITRF 91 dianggap
tetap. Kerangka koordinat WGS 84 yang telah ditingkatkan
kualitasnya ini telah dinamakan sebagai WGS 84 (G730). Huruf G
menyatakan bahwa sistem ini diturunkan menggunakan data GPS
dan angka 730 menunjukkan nomor minggu GPS (hari pertama-
nya adalah 2 Januari 1994). Menurut Sutift (19941 dan Malgs and
Slater (19941, tingkat kedekatan antara ITRF (91 & 92) dengan WGS
84 (G730) ini adalah sekitar 1O cm.
Pada tahun 7996, koordinat dari titik-titik kerangka WGS 84
(G730) ini ditingkatkan lagi, dan kerangka referensi yang baru di-
namakan WGS 84 (G873). Menurut NIMA (2OOO), tingkat ketelitian
dari setiap komponen koordinat dari WGS 84(G873) adalah sekitar
5 cm. Akhirnya, kalau diringkaskan maka proses realisasi kerangka
WGS 84 adalah seperti pada Tabel 2.4.
Pada sistem koordinat WGS 1984, yang merupakan sistem ko-
ordinat kartesian tangan kanan, ellipsoid referensi yang diguna-
kan adalah ellipsoid geosentrik WGS 84 yang didefinisikan oleh
empat parameter utama yang diberikan pada Tabel 2.5.
Tabel 2.5 Empat parameter Litama ellipsoid WGS 84 INIMA,2000]
Tabel 2.4 Realisasi kerangka WGS 84
Kerangka Periode berlaku
WGS 84 1 Jan 1987 - I Jan 1994
wGS 84 (G730) 2 Jan 1994 - 28 Sept 1996
wGS 84 (G873) seiak 29 Sept 1996
Parameter Notasi Nilai
Sumbu oanrans a b5/6r3/.U m
Penggepengan rlf 298,257223563
Kecepatan sudut Bumr 0) 72921 15,0 , 10-rr rad s-l
Konstanta Gravitasi Bumi
(termasuk massa atmosfer)
GM 3986004,41$ x lQa ,n:*-z](https://image.slidesharecdn.com/1520geodesisatelit-160412154021/85/geodesi-satelit-survey-29-320.jpg)
![4lt (iruorJa5l 5o1t711
Karena penentuan posisi dengan GPS diberikan dalam datum
WGS 84, dan secara praktis kadang kala pengguna perlu menyata-
kan koordinatnya dalam datum lainnya, maka parameter transfor-
masi antara datum WGS 84 dan clatum-datumlokal umumnya akan
sangat bermanfaat. Hubungan antara datum WGS 84 dengan be-
berapa datum yang pernah digunakan di Inclonesia ditunjukkan
pada Tabel 2.6 berikut.
Tabel 2.6 Parameter Transformasi dari Datum Lokal ke WGS 84
IDMA, 19etl.
Berkaitan dengan parameler transformasi dari datum IDT4 ke
WGS 84, lsubarya & Matind.c-s, Lgg6) memberikan parameter yang
lebih detail dan teliti, yang ditentukan dengan mertggunakan 38
buah titik sekutu. Dalam hal ini, seandainya rumusliansformasi
berikut digunakan:
lll =[]: J.(.;)[-: i ,: lt]l
L, 1.,, ,. lr,,l L, -i, , )lr)," ,
Datum
Lokal
Ellipsoid Referensi dan
Parameter Perbedaan
Nama
^c
(ml Afx loa
Batavia/G.Genuk
(Sumatra)
Bessel 1841 7 39,845 0, 1 0037483
Bukit Rimpah
(Bangka, Belitung)
Bessel 1841 739,845 o, 1 0037483
Gunung Segara
(Kalimantan)
Bessel 184l 739,845 0, I 0037483
Datum Indonesia
t974 (rD 741
LiKS t 9b / aa - 0,001I4930
Datum
Lokal
Parameter Transformasi
Ax (m) A)r (ml LZ lrnl
Batavia/G.Genuk
(Sumatra)
- J/ / _L.) 681+3 -50+3
Bukit Rimpah
(Bangka, Belitung)
384 664 -48
Liunung segara
(Kalimantan)
. Z+UJ 684 4t
Datum Indonesia
1974 (rD 74)
-24+25 l5+25 5+25
(2.2o1
Stslcnt Koortltrrttl ,l
'
)
maka nilai dari parameter-parameter trasformasinya adalah sebir
gai berikut:
xo
YU
zo
ds
o
G
v
= - 1,977 t
= -13,060 *
= -9,993 +
= -1,037 +
= - 0,364" +
= -0,254"
= -0,689" t
1,300 m
1,139 m
3,584 m
0,177 ppm
0,109"
0,060"
o,042"
Akhirnya perlu dicatat bahwa secara nasional penggunaan da-
tum ID 74 telah resmi digantikan dengan datum yang baru, yaitu
Datum Geodesi Nasianal 1995 IDGN 9.5]. Karena DGN 95 adalah
datum geosentrik serta menggunakan ellipsoid referensi yang sama
seperti yang digunakan oleh WGS 84, maka masalah transformasi
koordinat antara DGN 95 dan WGS 84 relatif tidak ada.](https://image.slidesharecdn.com/1520geodesisatelit-160412154021/85/geodesi-satelit-survey-30-320.jpg)
![Bab 3
SISTEM WAKTU
Dalam Geodesi Satelit, sistem waktu berperan dalam pende-
finisian sistem referensi koordinat, baik itu sistem CIS, CTS, Ellip-
soid, ICRS, maupun ITRS, seperti yang sudah terindikasi pada pem-
bahasan di bab sebelumnya. Sistem waktu diperlukan untuk tneng-
hubungkan'ukuran waktu yang biasa kita gunakan (tahun, bu-
lan, hari, jam, menit, detik) dengan fenomena fisik maupun geo-
metrik yang diukur/diamati. Disamping itu sistem waktu juga di-
perlukan dalam penentuan jarak ke satelit, penentuan orbit sate-
lit, serta studi rotasi bumi dan parameter-parameter orientasi Bumi
lainnya (lihat Gambar 3.1).
Ciambar 3.1 Peran sistem r,r'aktu dalam Geodesi Satelit.
Pada dasarnya ada 3 sistem waktu yang umum digunakan da-
lam Geodesi Satelit, yaitu [Moritz and Mueller, 1987]:
!. Waktu bintang (sidereal time) dan utaktu mataharl
(uniuersal/ solar timel yang berdasarkan rotasi harian Bumi.
51](https://image.slidesharecdn.com/1520geodesisatelit-160412154021/85/geodesi-satelit-survey-31-320.jpg)
![5'2 Geodesi Sateur
2. Wakdt dlnamik,yang berdasarkan pada pergerakan benda-
benda langit (celestial bodies) dalam sistem matahari.
3- waktu atom, yang berdasarkan pada osilasi elektromagnetik
yang dikontrol atau dihasilkan oleh transisi kuantum dari
suatu atom.
secara lebih spesifik, klasifikasi dari beberapa sistem waktu di
atas diberikan pada Tabel 3.1 berikut.
Tabel 3.1 Klasifikasi Sistem Waktu (S.W.);
dari [US/VO,2OOO; Montenbruck & Gitt,2000]
Akhirnya perlu juga dicatat bahwa umumnya ada dua aspek
dari waktu, yaitu epok (kala) dan interval. Epok mendefinisikan
secara presisi waktu kejadian suatu fenomena atau pengamatan,
dan interval adalah selang waktu antara dua epok.
3.1 SISTEM WAKTU BINTANG
_ waktu bintang (sidereal time) adarah sistem waktu yang unit
durasinya adalah periode rotasi Bumi terhadap suatu iitit y"rrg
(hampir) tetap terhadap bintang. Secara kuaniitatif, epok waktu
bintang adalah sudut-waktu (hour angle) dari titik semi (iernat equi-
nox/, seperti yang pada Gambar 3.2 berikut.
Proses
Periodik
Jenis Kategori
Rotasi Bumi - Universal Time (UT)
- Greenwich Sidereal Time (GST)
- S.W. Matahari
- S.W. Bintane
Revolusi Bumi Ephemeris Time (ET)
Terrestrial Dynamic Time (TDT)
Barycentric Dynamic Time (TDB)
Geocentric Coordinate Time (TCG)
Barycentric Coordinate Time (TCB)
- S.W. Dinamik
- S.W. Dinamik
- S.W. Dinamik
- S.W. Dinamik
- S.W. Dinamik
Osilasi Atom International Atomic Time (IAT)
UT Coordinated (UTC)
GPS Time
S.W. Atom
S.W. Atom
S.W. Atom
Gambar 3.2 Waktu Bintang
Titik semi
S}.slem Wr.rAltr lr.l
Sudut waktu dari titik semi sejati (yang masih dipengaruhi oleh
presesi dan nutasi) dinarnakan waktu bintang sejati (Apparent
Sideral ftme, AST). Bila referensinya meridian Greenwich maka dina-
makan GAST (Greenwich Apparent Sideral Timel, dan bila
referensinya meridian lokal dinamakan LAST (Local Apparent Siileral
Time). Sudut waktu dari titik semi menengah (masih dipengaruhi
oleh presesi) dinamakan waktu bintang menengah (Mean Sideral
?ime, MST). Bila referensinya meridian Greenwich maka dinama-
kan GMST (Greenuich Mean Sideral Timel, dan bila referensinya
meridian lokal dinamakan LMST (Local Mean Sideral Timel. Perbe-
daan antara waktu bintang sejati dan waktu bintang menengah
dinamakan Eqtation of Eqtinoxes (EE). Secara geometris, waktu-
waktu bintang tersebut diilustrasikan pada Gambar 3.3 berikut.
Titik semi
sejati
(Mean-Apparent) Sidereal Times = Equation of Equinoxes (EE)
Gambar 3.3 Beberapa jenis waktu bintang
Dari Gambar 3.3 di atas, dua hubungan berikut dapat ditulis-
kan, yaitu:
GMST - LMST = GAST - LAST = 1"
GMST - GAST = LMST - LAST = Av . cos(EE)
(3.1)
(3.21
dimana l" adalah bujur dari meridian lokal dan Ary adalah nutasi
dalam komponen bujur.
Akhirnya perlu dicatat bahwa satu hari bintang adalah interval
waktu antara dua kulminasi atas yang berurutan dari titik semi
menengah di meridian tertentu. Jam nol (00:00) suatu hari bin-
tang adalah pada saat titik semi (mehengah) berkulminasi atas.
Karena-titik semi menengah masih dipengaruhi oleh presesi, maka
GAST
Meridian
GDIST
Meridian](https://image.slidesharecdn.com/1520geodesisatelit-160412154021/85/geodesi-satelit-survey-32-320.jpg)
![( irtrlr'st Srtlt'lrl
perlu dicatat bahwa koreksi gerakan kutub berbeda untuk setiap
stasiun pengamat; sedangkan koreksi musim sama untuk setiap
stasiun. Pada saat ini ketelitian tipikal dari hasil estimasi UT1 ada-
lah sekitar 0,02 ms.
3.2.2 Hubungan Sistem Waktu Bintang dan Matahari
Hubungan antara kedua sistem waktu, bintang dan matahari,
adalah didasarkan pada hubungan matematis berikut:
MST:MT+cr -l2h,tl
(3.6)
dimana MST adalah Mean Sidereal Time, MT adalah Mean Solar
Time, dan cr,, adalah asensio rekta dari matahari menengah yang
dapat diformulasikan sebagai [Kaplan, 1981]:
o* = 18h41*50.54841" + 8640184.812866".7
+ 0,093104".T2 - 6,2'.10 6.T3 (3.7)
dimana T adalah waktu sejak epok standar J2000, 1 Januari, 12h
UT1, dihitung dalam abad Julian dimana satu tahunnya adalah
365,25 hari. Dari formulasi di atas dapat diturunkan hubungan
antara hari bintang dan hari matahari sebagai berikut:
t hari bintang menengah = t hari matahari menengah
- 3- 55,909. (3.8)
3.3 SISTEM WAKTU DINAMIK
Sistem waktu dinamik diturunkan berdasarkan pergerakan Bumi,
Bulan dan planet-planet dalam sistem matahari. Sistem waktu di-
namik ini didefinisikan pertama kali dengan sistem Ephemeis Time
(ET) pada tahun 196O, karena adanya ketidakcermatan dalam skala
waktu UT yang disebabkan oleh adanya ketidakteraturan dan vari-
asi pada rotasi Bumi. trT adalah skala waktu astronomis yang dida-
sarkan pada pergerakan Bumi mengelilingi Matahari UV/ST, 2OOOI.
Secara praktis ET ditentukan dengan membandingkan posisi hasil
pengamatan dari Matahari, planet-planet dan Bulan, dengan data
tabulasi hasil prediksi berdasarkan teori-teori analitis atau empiris
dari pergerakan benda-benda langit.
Sekitar tahun 1976, dua jenis sistem rvaktu dinamik baru dide-
finisikan, yarlw lHoffmqnn-Wellenhof et al., 1997|. TDB (Barycentic
Dgnamic Time) dan TDT (Terrestrial Dynamic Time). Sistem waktu
TDB diturunkan dari pergerakan planet-planet serta bulan yang
mengacu ke barycenfer (pusat massa) dari sistem matahari dan
,'jr:;1r'rrMtAltt lr()
.lDTnrengacukepusatmassaBumi(geocenter,TDBadalahsistettr
waktu inJrsia (berdasarkan Hukum Newton) dan umum diguna-
kan dalam pendefinisian ephemeris dari sistem matahari serta na-
vigasiwahanaangkasa.TDTadalahsistemwaktukuasi-inersia
pJngganti Ephemeris Time; dan umum digunakan dalam
p.ngl.rt.grasian persamaan diferensial dari pergerakan satelit da-
lam mengorbit bumi'
Dalam kerangka teori relativitas umum (general relatiuitgl jalJo
yang bergerak bersama Bumi akan mengalami variasi pe-riodik aki-
tat p..gt.akannya dalam medan gravitasi matahari' Dalam ke-
.r..rgiu.Ini wakt* tidak lagi menjadi kuantitas yang absolut' mela-
inkan kuantitas yang berubah dengan lokasi dan kecepatan' De-
ngan kata lain, setiap jam akan menunjukkan waktu sebenarnya
t[rop., time) nya-r"1r,g-*u'sing bergantung pada lokasi dan kece-
iata.r-ryu",
'dan
kesemrr.t y" terhubungkan melalui transformasi
iuang-waktu empat dimensi lMontenbruck & Gill,20O0l'
Untukmengakomodasiad.anyaefekrelativitasinimakapada
tahun lgg2, tiV ltnternational A stronomical Union) mendefinisikan
sistem-sistem waktu baru, yailu Terrestriat Time ITT), Geocentnc
CoordinateTime(TCG,d'anBarycenticCoordinateTime(TCB).TT
dimaksudkan untuk menggantikan TDT' Secara konseptual' TT
adalah skala waktu uniform yang akan diukur oleh suatu jam yang
idealdipermukaangeoid,|Montenbtuck&GiL,2000].Secaraprak-
tis, TT iirealisasik.i d..rg., waktu atom internasional (TAl). TT
dinyatakan dalam hari, dimana satu harinya sama dengan 86400
aetit< st (satuan Internasional). Sedangkan TCG adalah koordinat
waktu relativistik dari kerangka geosentrik 4-dimensi' dan TCB
adalah koordinat waktu relativistik dari kerangka barisentrik 4-
dimensi.
Hubungan antara beberapa sistem waktu dinamik tersebut telah
terdefinisikan secara matematis. waktu-waktu TT, TDT dan ET ter-
kait dengan waktu atom TAI sebagai berikut'
T'l = TDT = ET: TAI + 32.184"
SedangkanwaktuTCGterkaitdenganwaktuTTdenganhubungan:
TCG : TT + L..(JD - 2443144,5) . 86400' (3' 10)
dimana JD adalah tanggal Julian (Julian Date) yang akan diba-
has pad.a sub-bab 3.5 berikutnya; dan Lo adalah konstanta yang
ditentukan berdasarkan bilangan geopotensial di permukaan geoid
(Wo) sebagai berikut;
Lo = Wo/c2
(s.e)
(3.11)](https://image.slidesharecdn.com/1520geodesisatelit-160412154021/85/geodesi-satelit-survey-35-320.jpg)
![(tO ( icr;r,lc.si Srllr:lrt
dimana c adalah kecepatan cahaya dalam ruang hampa.
Wo = 62636856,85 rnrls,
maka:
Lc = 6,9692903. 10 10
Waktu TCB terkait dengan waktu TCG melalui
kut lMontenbruck & GiIl,20O0l:
TCB : TCG + LC.(JD - 2443144,5). 86400'+ p
dimana:
L.-1.4808268457. 108.
Dengan:
(3.12)
(3.13)
hubungan beri-
(3.14)
(3. is)
(3.16)
(3 17)
lainnya me-
(3.18)
(s.1e)
dan P adalah komponen periodik yang dapat dirumuskan seba_
gai:
P = + 0,0016568..sin(3S99g,3To.T+ 357,50)
+ 0,0000224..sin(32964,S0.T + 24601
+ 0,0000 13B..sin(71 998,70.T + 3350)
+ 0,0000048".sin(3034,90.T + 250)
+ 0,0000047".sin(34777 ,3o.7 + 2300)
dan
T = (JD _2451545,01136525
Sedangkan waktu TCB dan TDB terkait satu sama
lalui hubungan matematis berikut:
TCB = TDB + Lu.(JD - 2443144,5) . 86400'
dimana konstanta L" mempunyai nilai:
L, : L" * Lo = 1,5505197487. lo8
3.4 SISTEM WAKTU ATOM
waktu Atom (Atomic Tirne, AT) didasarkan pada osilasi elektro-
magnetik yang dihasilkan oleh transisi kuantum suatu atom. unit
waktu secara internasional pada sistem waktu atom adalah detik
yang didefinisikan sebagai berikut : "The second- is the cluration of
9192631770 periods of the radiation correspond.ing to the trqnsition
between the tuo hgperftne leuels of the ground. state of tlrc cesiurn-
133 atomIICWM, 19671,. Atom lainnya selain Cesium, seperti Ru-
iir:;ltrrt Wtthltt (rl
bidium dan Hydrogen Maser, juga dapat digunakan tutlrrli
rnerealisasikan sistem waktu atom.
Waktu Atom Internasional (International Atomic Time, TAll dt-
tetapkan dan dijaga oleh BIPM di Paris. Meskipun secara resmi
diberlakukan sejak Januari 1972, TAI sudah tersedia sejak Juli
1955 [It[Sf, 2000]. Sampai Nov. 1999 TAI ditentukan berdasarkan
data dari sekitar 50 laboratorium yang mengoperasikan sekitar 200
jam (osilator) atom di seluruh dunia. TAI ditentukan dengan meng-
ambil nilai rata-rata (dengan pembobotan) dari pembacaan selu-
ruh jam yang terlibat.
Pada prinsipnya ada beberapa jenis jam (osilator) atom, seperti
yang ditunjukkan pada Tabel 3.2 berikut. Contoh suatu jam atom
Cesium yang digunakan oleh USNO (United Sfafes Naual Obserua-
toryl, yaitw model HP5071A, ditunjukkan pada Gambar 3.9 beri-
kut.
Tabel 3.2 Karakteristik dari beberapa jenis jam (osilator) atom;
dari lLeick. 199fl
Tipe
Osilator
Frekuensi
Osilasi (Hz)
Stabilitas
per hari {dfl{
Waktu untuk
kehilangan
1 detik (tahun)
Kristal Quartz
Rubidium
Cesium
Hydrogen Maser
5 000 000 (tipikal)
6 834 682 673
9 192 631 770
I 420 405 75I
0.E-09
o.E-t2
0.E- 13
0.E- 15
30
30 ribu
300 ribu
30 juta
Gambar 3.9 Contoh suatu jam (osilator) atom [UCD, 2000]](https://image.slidesharecdn.com/1520geodesisatelit-160412154021/85/geodesi-satelit-survey-36-320.jpg)
![64 Geodesi SateLit
Berdasarkan persamaan (3.21) dan (3'23) di atas, makl hubung-
an antara UTC dan waktu GPS juga dapat diformulasikan' yaitu
sebagai berikut:
Waktu GPS = UTC + 1.00" . n - 19.000"
-30
-40
1950
(3.24l,
Dari hubungan-hubungan juga terlihat bahwa UTC dan waktu
GPS pada prinsipnya adalah sistem-sistem waktu atom' Hubung-
u..,
^r,.t^.u.
sistem waktu atom dengan sistem-sistem waktu lainnya
di atas ditunjukkan pada Gambar 3' 11 dan 3' 12 berikut'
Gambar 3.11 Hubungan antara sistem waktu atom dengan sistem waktu
lainnya lLangleY, L9991
920
o
d10
-10
-20
1960 lg70 1980 1990 2000 2010 2020
Tahun
Gambar 3.12 Hubungan antara sistem waktu atom dengan sistem waktu
dinamik; d'ari lseidelmann & Fukushima, 19921
UTC GPS TAI TT
+ Lalu st
-
(tetap)
-tI ,#l 1Er1sa4.o)
I i 32 s (Jan. leee)
Laju
I
Variatif,
tapi umumnya
relatif lambat
i.------l
i
,,
"
(lan. leee)
UT1
lag
<-
Si.sfern WrrA:lrr (llr
3.5 PENANGGALAN JULIAN IJULIAN DATEI
Dalam bidang Geodesi Satelit, sistem Penang g alan Julian (Julian
Date, JD) juga banyak digunakan. Sistem waktu dengan unit hari
ini, dihitung mulai 1 Januari 4713 SM. Suatu hari Julian dimulai
jam 12:00 UT (tengah hari).
Untuk menghemat digit dan menempatkan awal hari di tengah
malam sebagaimana sistem waktu sipil, diperkenalkan sistem
penanggalan yang merupakan modifikasi dari penanggalan Julian,
yang dinamakan Modified JulianDate(MJD). MJD diturunkan dari
JD dengan formulasi berikut:
MJD:JD-2400000,5 (3.2s)
Perlu dicatat di sini bahwa salah satu keunggulan dari sistem
JD ini adalah suatu epok (tahun, bulan, tanggal, jam, menit,detik)
dapat direpresentasikan hanya dengan satu bilangan. Ini sangat
efektif untuk perhitungan-perhitungan yang menggunakan prograrn
komputer. Dalam hal ini sebagai contoh:
. 6 Januari 1980 jam 00:00 UT (epok standar GPS)
->
JD -- 2444244,5
. 1 Januari 2000 jam 12:00 UT (epok standar, e.g CIS)
->
JD = 2451545,0
3.5.1 Transformasi Waktu Sipil ke Wahtu Julian
Waktu dalam penanggalan sipil dapat ditransformasikan ke
Waktu Julian dengan menggunakan algoritma tertentu. Seandai-
nya dalam waktu Sipil, tahun dinyatakan dengan bilangan bulat y,
bulan dinyatakan dengan bilangan bulat M. hari dinyatakan de-
ngan bilangan bulat D, dan jam dinyatakan dengan bilangan pe-
cahan UT, maka waktu tersebut dalam penanggalan Julian dihi-
tung dengan menggunakan formulasi berikut, yang menurut
[Hoffmann-Wellenhof et al., 1992] berlaku untuk epok antara Maret
19OO sampai Februari 2lOO:
JD = INT [365,25 y] + INT [30,6001 (m+1)] +
D + UT 124 + 1720981,5
Pada rumus di atas:
INT(.) = bilangan bulat dari bilangan pecahan (.)
y=Y- l danm:M+ 12, bilaM <2,dan
y=Y danm=M, bilaM>2
(3.27l,
Dalam hal pemanfaatan sistem satelit navigasi GPS, maka minggu
GPS yang umum dinyatakan dengan parameter WEEK dapat
dihitung dari waktu Julian JD dengan formulasi berikut:
{3.26]'](https://image.slidesharecdn.com/1520geodesisatelit-160412154021/85/geodesi-satelit-survey-38-320.jpg)
![( r{r (ieodesi Sctelit
WEEK = INT [(JD - 2444244,5)17l (3.28)
3.5.2 Transformasi Waktu Julian ke Sipil
Waktu Julian juga dapat ditransformasikan ke waktu dalam
penanggalan sipil. Seandainya waktu Julian JD diketahui, maka
parameter-parameter waktu dalam penanggalan Sipil, yaitu bilangan
bulat tahun (Y), bilangan bulat bulan (M), dan bilangan pecahan
hari (D), dapat dihitung dengan algoritma berikut ini lHoffmann-
Wellenhof et al., 19921:
D : b - d - INT[30,6001.e] + FRACUD+O,SI
M: e - 1 - 12.INT[elA]
Y : c - 47tS - INT[(7 + M)/10]
Pada rumus-rumus di atas:
a=INTUD+0,51
b=a+ 1537
c = INT[(b - 122,1) I 365,25)
d=INT[365,25.c)
e = INT[(b-d)/30,6001], dan
FRACI.] = nilai pecahan dari bilangan pecahan (.)
(s.2el
(3.30)
Perlu juga dicatat di sini bahwa nama hari dalam suatu minggu
dapat ditentukan dari waktu Julian (JD)-nya, melalui parameter N
yang dihitung dengan rumus berikut:
N = modulo I INT[JD + O,5l . 7 i (3.31)
Dalam hal ini, N: O menunjukkan hari Senin, N : t hari Selasa, N
= 2}:ariRabu, N = 3 hari Kamis, N = 4 hari Jum'at, N = 5 hari Sabtu,
danN=6hariMinggu.
Bab 4
SISTEM ORBIT
Dalam bidang geodesi satelit, informasi tentang orbit satelit akan
berguna untuk beberapa hal seperti:
. Untuk menghitung koordinat satelit yang nantinya diperlu-
kan sebagai koordinat titik tetap dalam perhitungan koordi-
nat titik-titik lainnya di atau dekat permukaan bumi beserta
parameter-parameter turunannya, seperti kecepatan dan
percepatan.
. Untuk merencanakan pengamatan satelit, yaitu perencanaan
waktu dan lama pengamatan yang optimal.
. Untuk membantu mempercepat alat pengamat (receiuer) sinyal
satelit dalam "menemukan" satelit yang bersangkutan.
. Untuk memilih, kalau diperlukan, satelit-satelit yang secara
geometrik "lebih baik" untuk digunakan.
Pada penentuan posisi dengan satelit, efek dari kesalahan orbit
satelit akan mempengaruhi tidak hanya penentuan posisi absolut,
tetapi juga penentuan posisi relatif, seperti yang diilustrasikan pada
Gambar 4.1 berikut.
orbit yang
sebenamya
orbit yang
dilaporkan
I
Penentuan
Posisi Absolut
Gambar 4.1 Efek kesalahan orbit pada penentuan posisi
Metode-metode pengamatan geodesi satelit pada prinsipnya
melakukan pengamatan dan pengukuran ke dan dari satelit-satelit
yang mengelilingi Bumi atau benda langit lainnya, baik itu satelit
buatan, satelit alam seperti Bulan, maupun benda langit lainnya
67](https://image.slidesharecdn.com/1520geodesisatelit-160412154021/85/geodesi-satelit-survey-39-320.jpg)
3
Secara matematis, berdasarkan hukum Newton, untuk satelit
yang mengelilingi Bumi, hukum Kepler III ini dapat diformulasikan
sebagai:
T' 4n'
a' GM
(4.21
dimana : T : periode orbit satelit,
a = sumbu panjang orbit,
G : konstanta gravitasi universal, dan
M = massa bumi.
Validitas Hukum Kepler III untuk kasus planet mengelilingi
matahari serta satelit mengelilingi Bumi, masing-masing ditunjuk-
kan pada Tabel 4.1, Gambar 4.5 dan 4.6 berikut.
Tabel 4.1 Bukti validitas Hukum Kepler III
untuk kasus planet mengelilingi matahari
Ada beberapa implikasi praktis dari Hukum Kepler III dalam
kasus satelit buatan yang mengelilingi Bumi, yaitu:
. Dua satelit dengan sumbu-sumbu panjang orbitnya sama
panjang, akan mempunyai periode orbit yang sama, tidak
Planet T a T2 a3 T'la'
Merkurius
Venus
Bumi
Mars
Jupiter
Saturnus
o,24
o,62
1,00
1,88
11,9
29,5
0,39
o,72
1,OO
1,52
5,20
9.54
o,o6
0,39
1,OO
3,53
142
870
0,06
o,37
1,00
3,51
141
868
o,97
1,03
1,00
1,01
1,01
1,00
Sumbu panjang orbit a dinyatakan dalam AU
(Astronomical Unit = sumbu panjang orbit Bumi) dan
periode orbit T dinyatakan dalam tahun.](https://image.slidesharecdn.com/1520geodesisatelit-160412154021/85/geodesi-satelit-survey-41-320.jpg)
!['/ ,1 ( icorlr:.st Salt,lil
. Hukum III: Untuk setiap aksi selalu ada reaksi balik yang
besarnya sama.
. Hukum Gravitasi Newton: Setiap partikel massa di alam
semesta akan menarik partikel massa lainnya dengan gaya
yang sebanding dengan perkalian massa partikel-partikel
tersebut (m, dan mr), dan berbanding terbalik dengan kuadrat
jarak antara keduanya (r), seperti yang diformulasikan berikut
ini:
p- 6
ffir'ffi2
t'
(4.41
dimana G adalah konstanta gravitasi universal yang
mempunyai nilai [Montenbruck & Gill, 2000]:
G = (6,67259 I 0,00085) . 16-tt m3kg-1s-2.
Dalam konteks pergera-
kan satelit mengelilingi
Bumi, maka berda-
sarkan hukum gravitasi
Newton, akan terjadi
tarik menarik tidak
hanya antara satelit
dengan Bumi seperti
yang ditunjukkan pada
Gambar 4.9, tetapi juga
antara satelit dengan
benda-benda langit
lainnya seperti Bulan
dan Matahari, serta
planet-planet lain.
''r..... ,l.
,.I
l, .......t
-ry
Gambar 4.9 Tarik menarik antara Butni clan
Satelit
Dalam konteks tarik menarik antara Bumi dan satelit, ber-
dasarkan persamaan (4.3), dan (4.41 di atas, maka vektor perce-
patan satelit (a) akibat adanya gaya tarik Bumi dapat dirumuskan
sebagai berikut:
GM
4= o t
r'
dimana M adalah massa Bumi, r adalah vektor posisi geosentrik
satelit, dan GM adalah koefisien gravitasi yang mempunyai nilai:
(4.s)
GM = (398600,4405 t 0,001) km3 s-2
Sumbu - X
Ganbar 4.10 Illcnren l(eplerial dari orbit satelit
Srsllnr ( )r/rrl
Sebagai catatan, nilai GM di atas ditentukan dari analisa <litlit
pengamatan sistem SLR [Ries et al., 19891.
4.2 ELEMEN KEPLERIAN DARI ORBIT SATELIT
Ukuran, bentuk, dan orientasi orbit suatu satelit yang mengeli-
lingi Bumi, serta lokasi dari satelit dalam orbit tersebut biasanya
dikarakterisasi dengan enam (6) elemen yang umum dinamakan
elemen Keplerian Elemen-elemen tersebut yang secara geometris
ditunjukkan pada Gambar 4.10 adalah:
O = asensio rekta dari titik nodal (ascending nodel.
: sudut geosentrik pada bidang ekuator antara arah ke titik
semi dan arah ke titik nodal.
i = inklinasi orbit
= sudut antarbidang orbit satelit dan bidang ekuator
cD = orgument of peigee
a
e
f
= sudut geosentrik padabidang orbit antara arah ke titik
nodal dan arah ke perigee.
= sumbu panjang dari orbit satelit
= eksentrisitas dari orbit satelit
: anomali sejati = sudut geosentrik pada bidang orbit anta-
ra arah ke perigee dan arah ke satelit.
t,t
Pusot bumi
Titik nodol
(ascending node)](https://image.slidesharecdn.com/1520geodesisatelit-160412154021/85/geodesi-satelit-survey-43-320.jpg)
!['/6 Oeotlt:siSotelil.
Kalau kita perhatikan geometri satelit dalam ruang yang diilus-
trasikan pada-Gambar +-lO berikut, maka terlihat bahwa masing-
-."itrg.Lrrr"r, Keplerian di atas punya peran masing-masing' yaitu
sebagai berikut:
.elemenOdanimendefinisikanorientasibidangorbitda|arn
ruang,
. elemen ro mendefinisikan lokasi perigee dalam bidang orbit'
. elemen a dan e mendefinisikan ukuran dan bentuk bidang
orbit, dan
. elemen f mendefinisikan posisi satelit dalam bidang orbit'
Dari enam (6) elemen orbit Keplerian di atas, lima (5) elemen
yaitu f2, i, o, a dt., ., nilainya diasumsikan konstan terhadap waktu'
ilu.ny" satu elemen yaitu f yang diasumsikan berubah dengan
wakiu. perlu juga dicatat bahwa epok saat satelit melintasi perigee
kadang digunakan sebagai pengganti elemen anomali f'
Sr.sl(',lr ()r/rrl '/'/
Pusat Perigee
Bumi
Gambar 4.11 Elemen Anoma]i
Perlu dicatat di sini bahwa anomali menengah M adalah anomali
yang didefinisikan secara matematis, yaitu M = 0'di perigee dan
kemudian membesar secara uniform dengan kecepatan 360" per
periode.
Ketiga anomali di atas, pada suatu epok tertentu t, secara mate-
matis terhubung dengan rumus berikut [Bate et al., l97 ll:
M(t) =n.(t-to)
E(t) = M(t) + e.sin E(t)
riescend.irtg
node
Z
t satelit (r,fl
peigee
biclan.g
ekuator
ascending
--r-.. rrorJe
(uernal
equinox)
Gambar 4.11 Geometri orbit satelit clalam ruang; diadaptasi daJi lseeber' 19931
Berkaitan dengan elemen anomali, ada tiga (3) jenis anomali
dalam konteks orbit Keplerian seperti yang ditunjukkan pada Gam-
bar 4.11, yaitu: anomali sejati(f), anomalimenengah(M), dan anomali
eksentik (D).
dimana n adalah mean motion dan t adalah waktu satelit melintasi
titik perigee.
P
Anomali sejati dan anomali eksentrik dapat dinyatakan sebagai
fungsi dari anomali menengah sebagai berikut:
f =M + 2e.sin M + (5/4).e2.sin 2M +
(l ll2).e3.{13.sin 3M - 3.sin M) + ......
E= M + e.sin M + (l l2). e2.sin 2M +
(1/8).e3.(3.sin 3M - sin M) + ..
Dengan menggunakan kedua persamaan di atas dan persamaan
4.6 sebelumnya, f dan E dapat dihitung dari M secara iteratif.
Akhirnya perlu ditekankan di sini bahwa pergerakan satelit yang
sebenarnya dalam orbitnyayang mengelilingi Bumi umumnya tidak
akan mengikuti sepenuhnya pergerakan Keplerian. Satelit umum-
nya akan mengalami perturbasi (gangguan-gangguan) dari kondisi
idealnya yang direpresentasikan dengan elemen orbit Keplerian.
f(t1 = 2."r",""1J[1t+ey1t-.; . tan [E(t)/2] ]
(4.6)
(4.71
(4.8)
(x,y) adalah
Sistem koordinat
orbital
-f-r'
,")](https://image.slidesharecdn.com/1520geodesisatelit-160412154021/85/geodesi-satelit-survey-44-320.jpg)
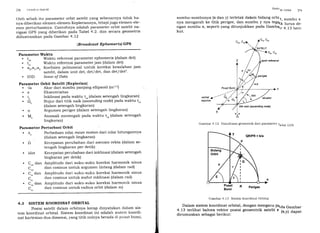

![a2 Geodesi Satelit
Garnbar 4. 15 Sateiit berorbit polar
4.4.3 Orbit Geostationer
Satelit berorbit geostationer adalah satelit yang mengelilingi Bumi
dengan kecepatan dan arah yang sama dengan kecepatan dan arah
rotasiBumi'UntukituperiodeorbitsatOlitharusSamadengan
periode rotasi bumi dalam ruang inersia yaitu T :23 jam 56 menit
ian 4,09 detik. Berdasarkan Hukum Kepler III, denganmengguna-
kan rumus (4.2) sebelumnya, maka orbit yang bersangkutan akan
mempunyai sumbu Panjang (a):
.Srslc,r ()r,rt ll:l
Karena posisinya yang relatif diam di atas suatu wilayah per-
mukaan Bumi, orbit ini banyak digunakan oleh satelit komunika-
si. Disamping itu karena orbitnya yang relatif tinggi, rnaka foot-
pint dari satelit geostationer umumnya sangat luas. Oleh sebab
itu satelit berorbit geostationer ini juga banyak digunakan untuk
mempelajari fenomena berskala luas seperti hurricanedan cyclone.
Meskipun begitu, orbit geostationer juga punya beberapa kele-
mahan. Pertama, karena satelit terletak relatifjauh di atas permu-
kaan Bumi maka resolusi pengamatannya relatif rendah. Disam-
ping itu juga satelit berorbit geostationer umumnya tidak dapat
mencakup kawasan kutub (lihat Gambar 4.17), sehingga tidak da-
pat digunakan untuk memantau fenomena atau aktivitas yang ter-
jadi di sekitar kutub.
Gambar 4.17 Contoh kelemahan orbit geostationer
4.4.4 Orbit Sun-Synchronous
Orbit sun-sgnchronous adalah orbit satelit yang mensinkronkan
pergerakan satelit dalam orbit, presesi bidang orbit, dan pergerak-
an Qumi mengelilingi matahari, sedemikian rupa sehingga satelit
tersebut akan melewati lokasi tertentu di permukaan Bumi selalu
pada waktu lokal yang sama setiap kalinya. Gambar 4.18
mengilustrasikan situasi orbit satelityang berpresesi dan yang tidak
berpresesi.
Urituk orbit sun-synchronous, karena bumi berevolusi mengeli-
lingi matahari dalam waktu setahun, maka orbit satelit juga harus
berpresesi terhadap sumbu rotasi bumi, sebesar 360o/tahun. Se-
cara matematis presesi orbit satelit terhadap sumbu rotasi Bumi
dapat diformulasikan sebagai [Dauidof, 1 990] :
Perlu dicatat di sini bahwa ha-
nya orbit ekuatorial (i : 0o) Yang
bisa menjadi orbit geostationer.
Disam-ping itu untuk mendaPat-
kan kecepatan satelit Yang sera-
gam, orbit harus berbentuk ling-
karan (e = 0). Karena kecePatan
dan arah pergerakannya sama
dengan kecePatan dan arah rotasi
Bumi, maka satelit geostationer
seolah 'nampak'diam bila dilihat
dari suatu titik di Permukaan
Bumi.
(4.16)
-----*r.' safefft'"F' .
,r'
-(,=*)' t.
,,/r Bumi
Bidang
ekuator
Gambar 4.16 Orlrtt
geostati oller
o = - e.es. [:r)' '.
[.J
/ GM ^r)r/3
"=lRr') =42165km
1
I
Dengan jari-jari Bumi sekitar 6378 km, maka orbit geostationer
tert<"eUn!gr"., 1fr1 sekitar 35787 km di atas permukaan Bumi' seperti
yang diilustrasikan pada Gambar 4.16'
cos(i)
(t-.2)' (4.17l,
dimana i adalah inklinasi orbit, e adalah eksentrisitas orbit, a.
adalah sumbu panjang Bumi (sekitar 6378 km), dan r adalah jarak
satelit dari pusat Bumi.](https://image.slidesharecdn.com/1520geodesisatelit-160412154021/85/geodesi-satelit-survey-47-320.jpg)
![Srslt,rtt ()rltrl
,/rn
//
.ffio.0,
unLnu lsrnNc
Summer
(Belahan Bumi Utara)
fi,,!,fu, x,^taw
-- (r*-T::,
-
1l--fl'. SIANG
]:-., KU
Rotasi Bumi
r
.{vl./ /-< /n
.2( .",-*:,/ ,r".:?, -_t
//z1Alt
/f,
Orbit satelit tidak berpresesi
ft4 ( ittttlesi Satelit
Summer
(Belahan Bumi Utara)
/,:
z'.'frzf '--
...z"
KU l"rrr"r)r,
,/ ';",';;'
r ;- '.,
tt -,
ff;: -,Irl1:._ .,flsorins
J r' r4i: ' 'U,.
' Fafi /'j '
t!, ;'
/t, winter ..'/ ,/
I-fqr:i)
s",,
Orbit satelit
berpresesi
Gambar 4. 18 Orbit satelit yang berpresesi dan tidak berpresesr
Persamaan (4.171di atas juga dapat ditulis dalam bentuk:
f, r3.5 ^^'l. l{ r I a.l-e"" I
1 - arccosll-i II - *"""'l[tj -g,gs I (4'i8)
Lr "' _l
Untuk orbit sun-synchronous maka kecepatan presesi orbitnya
adalah:
o = 36Oo/tahun = 0,986o/hari (4.te)
Kalau persamaan (4.L9) disubstitusikan ke persamaan (4.18), maka
akan diperoleh persamaan berikut untuk orbit sun-synchronous:
1 03o
IO2LJ
101()
10d
gg()
ggo
971)
96(J
200 400 600 800 1000 1200 1400 1600
ALTITUDE (km)
Gambar 4. 19 Contoh orbit sun-synchronous fDauidof, l99ol
Akhirnya perlu disebutkan bahwa orbit sun-sgnchronous umum
digunakan oleh sistem satelit inderaja (lihat Tabel 4.3) dan satelit.
cuaca.
Tabel 4.3 Beberapa orbit satelit inderaja yang sun-synchronous
LANDSAT 1-3 LANDSAT 4-5 IKONOS
Tinggi orbit
Inklinasi
Waktu mele-
wati ekuator
92O km
99,1-99,2 deg
8:50-9:30 a:m
7O5 km
98,2 deg.
9:45 a.m
681 km
98,1 deg.
1O:30 a.m.
4.5 JEJAK SATELIT
Jejak (trackl satelit di permukaan Bumi adalah garis yang meng-
hubungkan titik-titik sub-satelit, yaitu titik-titik potong garis
hubung satelit dan pusat Bumi dengan permukaan Bumi, seperti
yang diilustrasikan pada gambar 4.2O.
Plot dari jejak suatu satelit bermanfaat untuk beberapa hal.
Dengan plot ini lokasi satelit dari waktu ke waktu di atas permuka-
an Bumi dapat diketahui dan diperkirakan. Disamping itu wilayah
permukaan Bumi yang tercakup oleh satelit juga dapat terlihat.
Disamping itu dari plot jejak satelit kita juga dapat mengetahui
beberapa parameter dari orbit satelit seperti inklinasi dan periode
orbit. Dalam hal ini seperti yang ditunjukkan pada Gambar 4.21,
inklinasi dari orbit satelit adalah sama dengan lintang maksimum
a
z
.-]
z
(4.2ol,
Dari persamaan di atas terlihat bahwa suatu orbit dapat dibuat
sun-synchronous, dengan memilih inklinasi dan eksentrisitas or-
bit yang tepat, yang disesuaikan dengan ketinggian orbitnya di atas
permukaan Bumi. Persamaan di atas menunjukkan bahwa param-
eter orbit sun-synchronous bukanlah suatu yang unik (tunggal).
Tapi perlu dicatat dari persamaan (4.17) dan (4.201di atas bahwa
orbit sun-synchronous tidak mungkin berinklinasi tepat 900. Gam-
bar 4.19 berikut memberikan contoh nilai inklinasi dan altitude
yang'menghasilkan' orbit sun-synchronous berbentuk lingkaran
(e:o).
i = ".""o.|--o,oee10.(1 "'f(#)'''l
i
i
OSCAR](https://image.slidesharecdn.com/1520geodesisatelit-160412154021/85/geodesi-satelit-survey-48-320.jpg)
![ti(r ()t:<xlesiSutelit.
dari jejak satelit yang langsung dapat diestimasi dari plot jejak
telit yang bersangkutan.
Titik-titik
Sub-saterit
Gambar 4.2O Titlk sub-satelit di permukaan Bumi [NASA, 1999]
Gambar a.2l Jejak satelit di permukaan Bumi [Seeber, 79931
Perlu juga dicatat bahwa karena adanya rotasi Bumi, jejak sate-
lit di permukaan Bumi bergerak ke arah Barat dengan waktu, se-
perti yang ditunjukkan pada Gambar 4.22-
,St.slc,r ()r'lrrl tl'/
Untuk satelit geostationary, karena inklinasinya nol dan l)o
riode orbitnya sama dengan periode rotasi Bumi, maka jejaknya
akan merupakan titik yang tetap di permukaan Bumi.
4.6 PERTURBASI PERGERAKAN SATELIT
Pergerakan satelit mengelilingi Bumi secara umum dapat dije-
laskan dengan Hukum-hukum Kep1er. Namun karena pergerakan
satelit Keplerian mengasumsikan bahwa satelit bergerak dalam ru-
ang hampa dan hanya dipengaruhi oleh medan gaya berat sentral
bumi, yang notabene tidak sesuai dengan kondisi sebenarnya, maka
untuk memahami pergerakan satelit secara lebih detail, gaya-gaya
lainnya yang umum dinamakan gaya-gaya perturbasi, perlu juga
I
diperhitungkan.
Ada beberapa gaya perturbasi (lihat Gambar 4.221yang mempe-
ngaruhi pergerakan satelit mengelilingi Bumi, yaitu:
1.
Gambar 4.23 Gaya-gaya perturbasi yang mempengaruhi pergerakan satelit;
dari ISeeber, 1993]
Percepatan yang disebabkan oleh ketidaksimetrisan bentuk bumi
dan ketidakhomogenan massa di dalam Bumi (r"")
Percepatan yang disebabkan oleh tarikan benda-benda langit
lainnya (bulan, matahari, dan planet-planet); terutama pengaruh
bulan dan matahari ( r"" dan r"- )
sa-
I
t
Sate/it
@
Gambar 4.2'2 Pergerakan jejak satelit
2.](https://image.slidesharecdn.com/1520geodesisatelit-160412154021/85/geodesi-satelit-survey-49-320.jpg)
![t{
CO
1J
o
'(]0
t< -rd"
-5
! -f,
()o Or:oclesi SateLit
r80
Hubungan antara inklinasi, tinggi
orbit, dan pergerakan titik nodal
dimana:
lgs 150 120
lnKllnc*sl Orbfi
Hubungan antara inklinasi,
tinggi orbit, dan rotasi titrk perigee
(4.24l,
(4.2sl'
k- Gm, a5
r: = + + ? tr-iscos2e;I+6.coset-'2{r-ttd
,Srsl('rrr ()r/rrl () I
clan pasang surut laut (sea tides). Pasang surut bumi dan laut irri
selanjutnya akan menyebabkan perubahan pada potensial gravi
tasi Bumi. Perubahan potensial ini selanjutnya akan mempenga-
ruhi pergerakan satelit yang mengelilingi Bumi. Efek pasang surut
bumi dan laut ini pada dasarnya bisa dilihat sebagai efek tak lang-
sung dari gaya tarik Matahari dan Bulan.
Dalam analisa orbit untuk satelit berorbit rendah, pemodelan
efek dari pasang surut bumi dan laut secara rinci adalah sesuatu
yang sifatnya esensial. Percepatan satelit yang disebabkan oleh
pasang surut Bumi, dapat diestimasi dengan formula berikut [Rrzos
& Stolz, 19851:-1
-10
!0
114
Gambar 4.26 Efek ketidaksrmetrisan Bumi tcr'hadap lokasi titik nodal dan titik
perigee lSeeber,7993)
4.6.2 Gaya Gravitasi Bulan dan Matahari
Disamping gaya gravitasi Bumi yang terutama mempengaruhi
pergerakan satelit, gaya gravitasi dari benda-benda langit lainnya,
terutama Bulan dan Matahari, juga akan mempengaruhi pergerak-
an satelit. Dalam hal ini efek gaya grav,itasi Bulan terhadap perge-
rakan satelit relatif lebih besar dibandingkan gaya gravitasi Mata-
hari. Meskipun Matahari massanya jauh lebih masif dari Bulan
(sekitar 27 juta kalinya), tetapi jaraknya dari satelit juga relatif
lebih jauh (sekitar 390 kalinya).
Efek dari gravitasi Matahari dan Bulan terhadap pergerakan
satelit (dalam bentuk vektor percepatan r"" dan r"-), dapat difor-
mulasikan sbb.:
(4.26l'
dimana:
oo = massa benda penyebab pasang surut (bulan, m a t a -
hari),
ra = vektor posisi geosentrik penyebab pasang surut
(bulan, matahari),
e : sudut antara vektor geosentris satelit r dan r,,,
k, = Loue number, parameter elastisitas dari badan Bumi.
Efek dari pasang surut laut terhadap pergerakan satelit relatif
sulit untuk dimodelkan karena bentuk garis pantai yang relatif tidak
teratur.
4.6.4 Atmospheric Drag
Dalam pergerakannya mengetilingi Bumi, satelit akan berinte-
raksi dengan partikel-partikel (molekul, atom, ion) dalam atmosfer.
Akibat interaksi ini akan timbul gaya-gaya yang mempengaruhi
pergerakan satelit. Dalam hal ini gaya yang paling dominan adalah
gaya tarikan dari atmosfer (atmospheic dragl yang arahnya berla-
wanan dengan arah gerak satelit (lihat Gambar 4.27 berikut). Ka-
rena densitas atmosfer yang relatif mengecil dengan ketinggian,
maka efek dari atmospheic drag ini umumnya cukup signifikan
untuk sateiit-satelit berorbit rendah. Sedangkan untuk satelit
berorbit tinggi efeknya relatif kecil. Bahkan bisa dikatakan, atmo-
spheic drag ini adalah gaya perturbasi non-gravitasional paling
besar yang mempengaruhi satelit berorbit rendah.
Besar dan karakteristik gaya aerodinamik yang bekerja pada
permukaan tubuh satelit ini, akan bergantung pada beberapa fak-
tor antara lain:
r"- = G.m-. { (r_-r) 3.(r*-r) - r--3. r-}
r"" = G.m". ((r"-r)-3.(r"-r) - r"-3. r"l
f I
f m
f
m.ms
G
= vektor posisi geosentrik matahari,
= vektor posisi geosentrik bulan,
= vektor posisi geosentrik satelit,
= massa bulan dan massa matahari, dan
= konstanta gravitasi.
t
i
i
i
1
I
I,
t
4.6.3 Pasang Surut Bumi dan Laut
Gaya gravitasi Bulan dan Matahariyang bekerja pada Bumi akan
menyebabkan fenomena pasang surut Bumi (solidearth/bodg tidesl
20 l0 r+0 50 60 ?s 80
16.0 t!0 t(0 130 lz0 110 100
Inklinasi Orbit](https://image.slidesharecdn.com/1520geodesisatelit-160412154021/85/geodesi-satelit-survey-51-320.jpg)
![Gambar 4.28 Atmospheric Drag
Secara matematis efek dari atmospheric drog terhadap perge-
rakan satelit (dalam bentuk vektor percepatan) dapat diformulasi-
kan dengan rumus empirik berikut [Roy, 1988; Seeber, 1993] :
,St.slr:lrt ( )rlrrl
ini diestimasi sebagai parameter bebas dalam program penentuarr
orbit.
Sedangkan untuk densitas atmosfer, nilainya tidak hanya ber-
gantung pada ketinggian, tetapi juga lokasi geografis, musim, waktu,
aktivitas matahari dan geomagnetik. Gambar 4.29 rnengilustrasikan
variasi dari nilai densitas atmosfer ini. Karena densitas atmosfer
mengecil dengan meningkatnya ketinggian, maka pengaruh atmo-
spheic drag akan menurun secara drastis dengan meningkatnya
ketinggian. Untuk satelit seperti TRANSIT yang ketinggian orbit-
nya sekitar 1O0O km, efek dari atmospheic drag cukup berarti.
Namun untuk satelit GPS yang berketinggian orbit sekitar 20.000
km, atmospheric drag relatif tidak punya efek.
1000
800
600
400
200
l0-3 10-2 10-r 1 10
Densitas udara (ng m-3)
100 1000
Gambar 4.29 Densitas Atmosfer; dari Rog (1988)
Seperti ditunjukkan oleh persamaan (4.23l,di atas, besarnya efek
atmospheic drag juga akan bergantung pada kecepatan satelit re-
latif terhadap atmosfer. Semakin tinggi kecepatan satelit maka akan
semakin besar efek dari atmospheric dragpada satelit. Kalau sean-
dainya diasumsikan bahwa atmosfer berotasi bersama Bumi, maka
kecepatan relatif satelit terhadap atmosfer dapat dihitung berda-
sarkan hubungan lMontenbruck & Gill,200O]:
v.=v-oxt $.291
dimana v adalah vektor kecepatan (inersia) satelit, r adalah vektor
posisi satelit, dan ru adalah vektor kecepatan sudut Bumi.
( ilor,/r'.sr .Salr'/ll
geometri (bentuk, besar, konfigurasi) serta massa satelit,
kecepatan satelit,
orientasi satelit terhadap aliran udara , serta
densitas, temperatur, dan komposisi gas di atmosfer.
Atmosfer
().1
a
pergCiikan satelit
dalam orbitnya
(4.27)
tr
]{
!
u0
o
dimana:
ffi"
A
CD
p(r,t)
t, t'
r'
r"o= -(ll2). Co. p(r,t). (A/m"). lr'- r'"1 . (r'- r'")
= massa satelit,
: luas penampang efektif dari satelit,
: koefisien drag,
: densitas atmosfer di sekitar satelit,
: vektor posisi dan kecepatan satelit, dan
= kecepatan atmosfer di sekitar satelit.
Seandainya kecepatan relatif satelit terhadap atmosfer dinyata-
kan dengan v. dan vektor satuan arahnya adalah eu, maka persa-
maan (4.22l'di atas dapat dituliskan sebagai:
r"o: -(ll2l. Co. p(r,t). (A/m"). r.'. €, (4.28l'
Pada persamaan di atas, nilai koefisien drag Co akan bergan-
tung pada mekanisme interkasi antara partikel-partikel atmosfer
dengan permukaan satelit. Untuk satelit berbentuk bola, nilai C,
adalah 1. Semakin rumit bentuk permukaan dari satelit, koefisien
Co akan semakin besar. Menurut Montenbruck & Gill (200O), nilai
tipikal dari C, adalah antara 1,5 dan 3,0, dan umumnya koefisien](https://image.slidesharecdn.com/1520geodesisatelit-160412154021/85/geodesi-satelit-survey-52-320.jpg)
![<)4 (icodesi Satelil
Akhirnya patut dicatat bahwa karena efek dari atmospheric drag
bergantung pada densitas atmosfer di lokasi satelit, maka pemodelan
karakteristik dan dinamika atmosfer yang relatif kompleks meru-
pakan salah satu tantangan dalam penentuan orbit satelit yang
teliti pada saat ini.
4.6.5 Tekanan Radiasi Matahari (Solar Radiation Pressurel
Tekanan radiasi matahari (solar radiation pressurel dapat ber-
pengaruh terhadap pergerakan satelit. Tekanan radiasi matahari
ini ada yang bersifat langsung dan tak langsung, seperti yang di-
ilustrasikan pada Gambar 4.30 Dalam efek tak langsung (albedol,
radiasi matahari terlebih dahulu dipantulkan oleh Bumi sebelum
mengenai satelit. Besarnya efek tekanan radiasi matahari pada
pergerakan satelit akan bergantung pada beberapa faktor seperti
tingkat aktivitas matahari, massa satelit, reflektivitas permukaan
satelit, geometri satelit, serta posisinya relatif terhadap matahari.
Gambar 4.30 Tekanal Radiasi Mata-hari
Secara matematis, efek dari tekanan radiasi matahari yang lang-
sung terhadap pergerakan satelit (dalam bentuk vektor percepat-
an) dapat diformulasikan dengan rumus berikut lCapellai et al.,
te76l:
r'o": u.P..C..(A/m).(AU)' .lr - r"l-t. 1r - r") , (4.30)
dimana:
P" = tekanan radiasi matahari
= solar flux/kecepatan cahaya
tx 4,56. 10-6 Nrr'2 lMontenbntck & Gill,2OO0l.
C., = koefisien tekanan radiasi matahari
: 1 + reflektivitas dari permukaan satelit
= l,2l untuk solar panel, 1,30 untuk high-gain antenna,
dan 1,88 untuk alumunium
lMontenbntck & Gill, 2000].
.Si.slcrrr ( )rlrrl
Altr' = rasio luas permukaan dengan massa satelit
AU = Astronomical Unit (1,5.108 km)
t, t. : vektor posisi satelit dan matahari dalam space-fixed equa-
torial system
fungsi bayangan
O, satelit dalam daerah bayangan Bumi (umbra)
1, satelit dalam daerah pancaran radiasi matahari
O < u <1, satelit dalam daerah setengah bayangan (penumbral.
Perlu dicatat di sini bahwa karena adanya eksentrisitas dari or-
bit Bumi, jarak antara satelit yang mengorbit Bumi dengan Mata-
hari akan bervariasi antara l47.106 km dan 152.106 km sepanjang
tahunnya. Ini akan menimbulkanvariasi tahunan sekitar 3,3o/opada
tekanan radiasi matahari, karena fluks radiasi matahari (solarfluxl
akan berkurang dengan faktor jarak kuadrat (r'?) dari matahari
fMontenbntck & Gitl, 2OOO].
Pengaruh tekanan radiasi matahari yang langsung terhadap
pergerakan satelit, umumnya paling terasa pada komponen along-
track, yaitu dalam arah pergerakan satelit. Dibandingkan dengan
efek dari radiasi matahari yang langsung, efek tak langsung (al-
bedol urnumnya lebih kecil dari 107o efek langsungnya. Untuk sa-
telit berorbit rendah, percepatan tipikal yang disebabkan oleh al-
bedo pada pergerakan satelit adalah sekitar 10 sampai 35% dari
percepatan yang disebabkan oleh radiasi matahari langsung [Knocke
Lt
^1.,
19881. Untuk satelit GPS yang orbitnya relatif tinggi (sekitar
20.000 km di atas permukaan Bumi], efek albedo berkisar sekitar
l-2%o dibandingkan efek langsungnya, dan umumnya diabaikan
dalam perhitungan orbit GPS. Perlu dicatat di sini bahwa karena
distribusi yang variatif dari tanah, air, dan awan di permukaan
Bumi, efek dari albedo umumnya cukup sulit untuk dimodelkan
secara baik.
4.6.6 Gaya-gaya Perturbasi Lainnya
Dalam analisa orbit berketelitian tinggi ada beberapa gaya
perturbasi kecil lainnya yang perlu diperhitungkan, yaitu :
. Friksiyang disebabkan oleh partikel-partikel bermuatan di lapisan
atmosfer bagian atas
. Radiasi termal dari satelit
. Efek perbedaan pemanasan pada daerah batas bayangan bumi.
. Interaksi elektromagnetik dalam medan geomagnetik
. Pengaruh-pengaruh dari debu antarplanel (inter-planetary dustl
. Efek relativistik
. Pengaruh dari manuver-manuver untuk pengontrolan dan
pengendalian satelit.
()l;](https://image.slidesharecdn.com/1520geodesisatelit-160412154021/85/geodesi-satelit-survey-53-320.jpg)

![I OO ( icotlt:st SutcLit
Gelombang elektromagnetik mempunyai spektrum radiasi yang
cukup luas, mulai dari panjang gelombang yang terpanjang (ge-
lombang radio panjang) sekitar 1OOO km, sampai yang terpendek
(radiasi kosmik) sekitar 1O 10 prm, seperti yang ditunjukkan pad.a
Gambar 5.2. Dalam bidang geodesi satelit, dua domain spektrum
yang banyak digunakan adalah domain sinar tampak (uisible light)
dan domain gelombang mikro.
tampak (vrslb/e irgrhts)srnar
Radiasi
kosmik
I
Radiasi
I Rontgen
UV infrared gelombang
mikro
gelombang
radio
10-16 10-14 10-12 t0-10 1O-E 10-6 104 1O-2 100
Panjang gelombang, ), (m)
G arn b ar'
?
j.H:f.i Tr:: ?T:;T,"r r:T
o m a gn e tik
Radiasi elektromagnetik juga kerap diklasifikasikan seperti pada
Tabel 5.1. Perbedaan mendasar dari gelombang-gelombang ini ter-
letak pada panjang gelombangnya, yang terkait langsung dengan
energiyang dibawa oleh gelombang tersebut. Semakin pendek pan-
jang gelombang dari suatu radiasi, maka akan semakin tinggi fre-
kuensi dan energinya, dan sebaliknya.
Table 5.1 Contoh klasifikasi radiasi elektromagnetik
fSeeber, 1993 Rueger, 1996]
l'ropotlusi Sirrtlul lOI
Perlu juga dicatat bahwa spektrum gelombang dalam kategori
pita-pita SHF dan UHF, serta sebagian dari EHF dan VHF umum_
nya juga dinamakan sebagai gelombang mikro (microttaue). Gelom-
bang mikro banyak digunakan untuk aplikasi terekomunikasl (ter-
masuk telekomunikasi dengan satelit) serta pada sistem-sistem
Radar (Radio Detection and Rangingl.
Spektrum gelombang mikro ini kadang juga diklasifikasikan
dalam pita-pita frekuensi (frequencg bands) tertentu. Ada beberapa
kategori pembagian spektrum frekuensi gelombang mikro yang di_
kenal, dan salah satunya adalah yang diberikan pada Tabel 5.2
berikut.
sistem-sistem pengamatan yang digunakan dalam geodesi sate-
lit umumnya tidak menggunakan sinyal dengan frekuensi yang
sama. Tabel 5.3 berikut menunjukkan beberapa contoh spektrum
frekuensi yang digunakan oleh sistem geodesi satelit.
Tabel 5.3 Contoh beberapa frekuensi
yang digunakan oleh sistem satelit
106104102
Tabel 5.2 Klasifikasi spektrum gelombang mikro lRueger, tgg6)
Pita (band) Panjang Gelombang Frekuensi
V Band
Q Band
K Band
X Band
S Band
L Band
P Band
5,3 mm - 6,5 mm
6,5 mm - 8,3 mm
8,3 mm - 27,5 mm
27,5 mm - 57,7 rnm
57,7 mrn - 0,194 m
0,194m-O,769m
0.769m-1.333m
46 - 56 GHz
36 - 46 GHz
10,9 - 36 GHz
5,2 - tO,9 GHz
1,55 - 5,2 GHz
0,39 - 1,55 GHz
0,225 - 0,39 GHz
Radiasi Paniang Gelombans Frekuensi
X-rays
Ultraviolet
Visible light
Infrared
EHF
SHF
UHF
VHF
HF
MF
LF
VLF
ELF
1,6 x 10-tr - 6,6 x 1O'8 m
1,4 x 10-8 - 3,6 x 10'7 m
3,6 x 10'7 - 7,8 " 1O-7 m
7,8 x lO-7 - 3,4 , 10-a m
1,0 x 10'3 - 1,0 x 1O-2 m
1,0 x 10-2 - 1,0 x 10'' m
0,1 -1m
1-10m
10-10rm
102 - 103 m
103 - 10a m
104- 10s m
lOs- 106 m
4,5x101s-1,9
8,3xlOt4-2,2
3,8x lOra-8,3
8,8x10rt-3,8
3x1oto -3x
3x10e -3x
3x1O8-3x
3x107-3x
3x106 -3x
3xlos -3x
3x10a-3x
3x1O3 -3x
3x102-3,
lOts Hz
lOt6 Hz
lOta Hz
LOla Hz
.O1t Hz
Ol" Hz
oe Hz
08 Hz
07 Hz
06 Hz
Os Hz
Oa Hz
03 Hz
Sistem Satelit Frekuensi Sinyal
TRANSIT/Doppler 150 MHz
4OO MHz L - band
GPS t227,60 MHz
1575,42 MHz
L - band
L - band
GLONASS r602,562s - 1615,5 MHz
1246,4375 - 1256,5 MHz
L - band
L - band
Mark-III VLBI System 2,2 - 2,3 GHz
8,2 - 8,6 GHz
S
x
band
band
TOPEX/Poseidon
(Radar Altimeter)
5,3 GHZ
13,6 GHz
X - band
K - band
ERS-1 (Radar Altimeter) 13,8 GHz K - band](https://image.slidesharecdn.com/1520geodesisatelit-160412154021/85/geodesi-satelit-survey-56-320.jpg)
![l()'2 Geodesi Satelit
5.2 ATMOSFER BUMI DAN KARAKTERISTIKNYA
Terminologi atmosfer biasanya digunakan untuk mendes-
kripsikan lapisan udara yang melingkupi Bumi lVanicek and
Krakiutskg, 19861.
Atmosfer dapat diklasifikasikan menjadi beberapa lapisan. Ber-
dasarkan kriteria yang digunakan dalam klasifikasi, dikenal bebe-
rapa nomenklatur lapisan-lapisan atmosfer, seperti yang ditunjuk-
kan pada Gambar 5.3 berikut.
l'r()l)Q(lust Suu!ul IO.t
Dari Gambar ini terlihat bahwa di bawah ketinggian 200 krn,
atmosfer didominasi oleh gas-gas Oksigen (Or) dan Nitrogen (Nr);
sementara di atas 200 km yang mendominasi adalah atom-atom
Oksigen (O). Dari Gambar 5.4 juga terlihat bahwa densitas udara
mengecil dengan ketinggian, dan di atas ketinggian sekitar 1000
km umumnya sudah relatif sangat kecil dan dapat diabaikan. Per-
lu dicatat di sini bahwa dengan semakin membesarnya ketinggian,
pengaruh medan magnetik Bumi terhadap partikel-partikel dalam
atmosfer akan semakin membesar.
Berdasarkan profil temperaturnya, lapisan atmosfer Bumi umum
dibagi atas troposfer, stratosfer, mesosfer, dan termosfer, seperti
yang diilustrasikan pada Gambar 5.5 berikut.
rsfer
I
Mesosfer
I
Lap.
Ozon
I
Tlononnt tce
Stratosfer
I
-100 -50
Temperatur (oC)
Ciambar 5.5 Profi1 temperatur terhadap ketinggian di
lapisan bawah atmosfer Bumi; dari IrIASA BSE, 2000].
Da-lam hal irri troposfer adalah lapisan paling bawah dari atrno-
sfer Bumi yang mempunyai ketinggian sekitar 8 sampai 15 km di
atas permukaan Bumi, bergantung pada lintang. Seperti yang di-
tunjukkan oleh Gambar 5.5, temperatur dalam lapisan troposfer
turun dengan semakin besarnya ketinggian. Di atas troposfer, ter-
dapat lapisan stratosfer yang ketinggiannya mencapai sekitar 5O
km. Dalam lapisan stratosfer, temperatur kembali naik dengan
membesarnya ketinggian. Temperatur kembali turun di dalam la-
pisan mesosfer, yang berketinggian 50 sampai 80 km di atas per-
mukaan Bumi. Penurunan ini dapat mencapai -500C sampai -1400C,
Ketlnggian
(km) femperatur loniesi
Medan
MagnetiN
Propagasi Teknikal
10.000
1.000
100
10
Termosfer
Protonosler
Magnetosfer
lonosfer
Troposfer
Atmosfer
Afes
lonosfet
Mesosler
Dinamofet
Strafosfer
Neutroster Atnosfer
BawahTroposter
300
200
100
BO
60
40
20
,&
(!
bo
bo
0)
M
Gambar 5.3 Beberapa klasifikasi atmosfer Bumi ISeeber, 1993]
Atmosfer Bumi terdiri atas beberapa jenis gas seperti Oksigen, Ni-
trogen, Helium, dan Argon. Menurut Tascione (1994), secara umum
tiga gas utama yang membentuk atmosfer adalah Nitrogen (sekitar
78ohl, Oksigen (sekitar 2lo l, dan Argon (sekitar 1%). Sampai keting-
gian sekitar 100 km, gas-gas tersebut bercampur secara baik, sehing-
ga densitasnya relatif sama dengan di permukaan Bumi. Di atas ke-
tinggian ini setiap gas berada dalam kesetimbangan difusif dan dis-
tribusi vertikal dari setiap gas akan bergantung pada berat molekul-
nya. Komposisi tipikal gas dalam atmosferyang diturunkan dari peng-
ukuran pada tahun 1960-an ditunjukkan pada Gambar 5.4 berikut.
Komposisi Gas
Atmosfer Bumi
.... N"
- .i..
los 106 lO7 108 loe l0r0 IOI lor2
Jumlah partikel (cm-3)
Ganrbar 5.4 l{omposisi gzrs atmosfer Bumi; dari UOL (2O0O)
10050
500
400
5 .oo
.! zso
bo
ff zoo
o
v rso
100
t](https://image.slidesharecdn.com/1520geodesisatelit-160412154021/85/geodesi-satelit-survey-57-320.jpg)
![I O4 ( ilorlr.sr Srrlr,/il
bergantung pada lintang dan musim. Dari ketinggian BO km,, tem-
peratur kembali naik di dalam lapisan termosfer. Temperatur ini
dapat naik sampai 20000C, dan bahkan kadang mencapai ?5OO0C
pada siang hari [IIASA ESE, 2000].
Dalam konteks propagasi sinyal dari satelit ke permukaan Bumi,
atmosfer umumnya dibagi menjadi dua lapisan, yaitu troposfer dan
ionosfer.
Ionosfer adalah bagian dari lapisan atas atmosfer yang karena
adanya radiasi Matahari mempu4yai sejumlah elektron dan ion
bebas. Lapisan ionosfer ini mempunyai batas bawah pada ketinggi-
. an sekitar 50 sampai 70 km; dengan ketinggian batas atas yang
tidak terlalu jelas, meskipun untuk banyak aplikasi ketinggian 2000
km digunakan sebagai batas atas [?oscione,1994]. Jumlah (densitas)
elektron dan ion bebas pada lapisan ionosfer ini bergantung pada
besarnya intensitas radiasi matahari serta densitas gas pada lapis-
an tersebut lDauies, 199o1. Disamping itu struktur vertikal densitas
eletron dalam ionosfer juga berubah secara kontinyu. Struktur ini
juga variatif terhadap waktu, musim, dan lintang setempat.
Secara umum berdasarkan membesarnya ketinggian dan
densitas elektron, lapisan ionosfer dapat dikategorisasikan men-
jadi lapisan-lapisan D, E, F1, dan F2, seperti yang diilustrasikan
pada Gambar 5.6 berikut. Ketinggian lapisan-lapisan ini dari
pemukaan Bumi adalah berkisar sekitar lseeber, 1993] : 60 - 90
km untuk lapisan D, 85 - 14O km untuk lapisan E, 140 - 200 km
untuk lapisan F,, dan 2OO - 1000 km untuk lapisan F,.
l'ntlturlrt:;t Sirrrlttl IOlr
Lapisan D adalah lapisan ionosfer yang paling bawah, clan l<irrc
na jaraknya relatif yang paling jauh dari matahari, maka iotrisasi
pada lapisan ini adalah yang terkecil dibandingkan lapisan-lapisan
lainnya. Lapisan yang menghilang pada malam hari ini, meman-
tulkan gelombang VLF dan LF serta menyerap gelombang MF dan
HF Ilomasi, 19941. Lapisan E, yang kadang dinamakan lapisan
Kennelg-Heauiside, membantu propagasi gelombang permukaan MF
dan pada siang hari memantulkan gelombang HF. Pada malam hari,
lapisan E ini juga secara praktis hampir seluruhnya menghilang.
Lapisan paling atas atrnosfer, yang dinamakan lapisan F, umum-
nya dibagi menjadi lapisan F, dan Fr. Lapisan F, menyerap dan
memperlemah sebagian gelombang HF. Pada malam hari lapisan
F, bergabung dengan lapisan F, membentuk hanya satu lapisan.
Dari Gambar 5.6 di atas, yang merupakan contoh profil untuk
lintang menengah, terlihat bahwa secara umum karena terkait de-
ngan intensitas radiasi matahari, maka densitas elektron dalam
lapisan ionosfer lebih besar pada siang hari ketimbang malam hari.
Densitas elektron juga membesar dengan meningkatnya tingkat
aktivitas matahari, yang dikarakterisasi dengan meningkatnya jum-
lah sunspot yang teramati di permukaan matahari. Disamping itu
profil densitas elektron ini juga akan berubah untuk daerah kutub
dan ekuator.
Adanya lapisan-lapisan ionosfer yang diilustrasikan pada Gam-
bar 5.6 terjadi karena beberapa faktor, yaitu Ilascione, 19941:
1. sepektrum radiasi matahari menyimpan energinya pada
beberapa ketinggian bergantung pada karakteristik penyerapan
(absorption) dari lapisan atmosfer;
2. proses fisika dari rekombinasi ion bergantung pada densitas
atmosfer yang bervariasi dengan ketinggian; dan
3. komposisi dari atmosfer berubah dengan ketinggian.
5.3 PROPAGASI GELOMBANG
Berbicara tentang propagasi gelombang elektromagnetik dalam
atmosfer Bumi, ada beberapa konsep penting yang perlu dijelas-
kan, yaitu terkait dengan medium dispersif dan non-dispersif, ke-
cepatan fase dan kecepatan group, serta interaksi energi antara
gelombang dengan partikel-partikel yang ada dalam atmosfer: Kon-
sep-konsep tersebut dijelaskan secara umum berikut ini.
5.3.1 Medium Dispersif
Medium dimana kecepatan propagasi dari gelombang elektro-
magnetik bergantung pada frekuensi dinamakan medium dispersif.
Pada medium dispersif, tidak seperti halnya pada medium non-
dispersif, indeks refraksi bergantung pada frekuensi sinyal. Oleh
Sunspof :
maksimum _
minimum
i'
,
Malam F F2
iF,
in/
t0 7O2 1O3 1O4 los 106
Konsentrasi Elektron (cm-s)
Ci:uubar- 5.(r [,ro1]1 tiprkzrl rlensrtas elektron untuk lnrl:rn1,,
tneneng:rh padzr siang dan rnalam hari; dari [?a-sciorrr,, I()() li
J( 400
a
ho
bo
.E 2oo
o
150
100
80
60
A](https://image.slidesharecdn.com/1520geodesisatelit-160412154021/85/geodesi-satelit-survey-58-320.jpg)

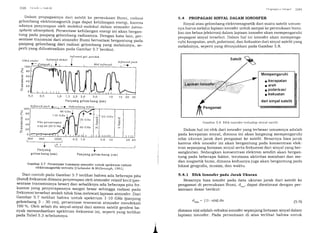
![I IO (ir,tnlt.::t !ittt.lrt
rr)cnentukan besarnya efek ionosfer tersebut, indeks refraksi ionosl-er
harus dispesifikasikan terlebih dahulu.
Indeks refraksi ionosfer (n) telah diturunkan oleh Appleton dan
Hartree, dan dapat diformulasikan sebagai [Klobuchor, iggOl,
n2 =7
: f^2 /P
= {,, cosO/f
= f, sinO/f (s.1i)
Pada persamaan (5.11) di atas,
N = konsentrasi elektron,
e - muatan elektron = _I,602. 10_re Coulomb,
Eo = permitivitas ruang hampa = g,BS4 . 1O_r2 Farad/m,
m : massadiam elektron = 9,107. 10_31 kg,
0 = sudut arah rambat gelombang
terhadap med3n magnetik Bumi,
l = frekuensi tumbukan netral elektron, sekitar roa Hz,
{, = frekuensi giro elektron = 1,5 MHz (tipikal),
f. = frekuensi plasma, jarang melebihi 20 MHz,
f = frekuensi gelombang elektromagnetik, dan
Brdan B, adalah komponen dari medan magnetik Bumi.
Dengan akurasi tebih baik d.ari ro/o, persamaan (s.10) di atas
dapat diaproksimasi dengan p.r"arnra, berikut, yang mengako_
m_odasi suku pertama dan mengabaikan
"ut
u_"it u tinggi
fKlobucha6 1996)
n= t-(Xl2) =Ne2/(2eomo2) (S.12)
Dengan memasukkan nilai-nilai e, eo dan m ke persamaan di atas
akan diperoleh persamaan:
Berdasarkan persamaan (5.9) di atas,
pertama pada data ukuran jarak adalah:
i'roltutlttsrSttttytl I I I
maka efek ionosfer orrk.
(s.14)
dimana STEC (Slant Total Electron Content) adalah jumlah elektron
sepanjang lintasan sinyal dalam lapisan ionosfer, di dalam suatu
silinder yang luas penampangnya 1 m2. Pada persamaan di atas,
STEC dinyatakan dalam unit elektronf rn2, frekuensi dalam unit
Hertz, dan do. dalam unit m. Kadangkala STEC juga dinyatakan
dalam unit TECU (TEC Unit), dimana 1 TECU = 1016 elektron/m2.
Patut dicatat di sini bahwa pada frekuensi sekitar 1,2 GHz (con-
toh untuk sinyal satelit GPS), bias ionosfer pada jarak ukuran bisa
lebih dari 150 m sampai kurang dari 5 m. Besarnya bias ionosfer
tersebut didominasi oleh orde pertama bias ionosfer. Sedangkan
orde kedua (fungsi dari i / 13) dan orde ketiga (fungsi dari 1 / Ia) seca-
ra total hanya akan mencapai level maksimum sebesar beberapa
desimeter fWubbena, 199 1].
5.4.2 Variasi Efek lonosfer
Secara umum konsentrasi elektron dalam ionosfer akan berva-
riasi secara harian (diurnal), musim, lokasi, aktivitas matahari, serta
ketinggian dalam lapisan tersebut fMcNamara,1991]. Dengan kata
lain efek ionosfer akan mempunyai variasi spasial dan juga tempo-
ral. gaiiasi spasial dari efek ionosfer umumnya berfrekuensi ren-
dah dan terutama terkait dengan regionisasi dari aktivitas ionosfer
(daerah ekuator, lintang menengah, dan daerah auroral), seperti
yang ditunjukan pada Gambar 5.9. Pada daerah ekuator, bias ion-
osfer umumnya mempunyai nilai yang besar tetapi relatif stabil
(fluktuasi nilai biasnya secara temporal relatif tidak terlalu besar).
Pada daerah auroral, meskipun nilai dari bias ionosfer relatif kecil
tetapi relatif cukup fluktuatif. Sedangkan pada daerah lintang me-
nengah, nilai dari bias ionosfer dan fluktuasinya umumnya berada
pada level menegah (sedang).
Sedangkan variasi temporal dari efek ionosfer bisa berfreku-
ensi tinggi (scintillatton), menengah (variasi harian dan musiman),
maupun rendah (variasi 11 tahunan). Scintillationadalah variasi
temporal berfrekuensi tinggi pada amplitudo dan fase dari sinyal,
yang disebabkan adanya ketidakteraturan (irregalaities) pada la-
pisan ionosfer.
dio. =
ff r*.o" _ 40,3. STEC
f2
Y.: I vo 1't'
'-"-r(r-*-rrttl^u_i_;),*,:l (s.10)
dimana: X :
Y,. =
Yr=
Z=
o
Ne2/ (eomro2)
eBr/(mto)
eBr/(mro)
f,f a
2rf
t
n: 1-40,3N/f, (s.13)](https://image.slidesharecdn.com/1520geodesisatelit-160412154021/85/geodesi-satelit-survey-61-320.jpg)
![a Bias ionosfer kecit tetapi tidak stabil
Daerah
Lintang
Menengah
Daerah Tropik
S Bias ionosfer
besar tapi stabil
Daerah Lintang Menengah
O Bias ionosier sedang
dan kestabilan sedang
Daerah Auioral
Gambar 5.9 Regionisasi clari aktivrtas ionosfer
Fenomena scintillationini umumnya terjadi pada daerah sepan-
jang garis ekuator geomagnetik bumi, yaitu meliputi witayah 30
derajat pada kedua sisi dari garis ekuator tersebut . scintinationjuga
umum terjadi di daerah auroral sekitar kutub. patut dicatat bahwa
scintillation di daerah ekuator umumnya mempunyai efek yang
maksimum dalam selang waktu kila-kira satu jam setelah mata-
hari terbenam sampai tengah maram fKrobuchir, 1991]. oreh se-
bab itu untuk pengamatan yang sangat teliti di daerail ekuator,
selang waktu di atas sebaiknya tidak digunakan. Dari pengaraman
didapatkan bahwa efek sclnfiilation biasanya kurang berarti dari
bulan April sampai Agustus pada daerah bujur Amlrika, Afrika,
dan India; tetapi maksimum di daerah pasifik- Dari buran septem-
ber sampai Maret, situasinya adalah terbalik [Seeber,1993].
Aktivitas ionosfer juga mempunyai variasi temporal yang bersi-
fat harian. Dalam hal ini, secara empirik didapatkan bahwa sesuai
dengan aktivitas matahari yang relatif tinggi, .rit^i tBc yang terbe-
sar biasanya terjadi pada tengah hari (jarn 2 siang *.t to lokal),
seperti yang ditunjukkan idealisasinya pada Gambar 5.10.
Dari hasil pengamatan sebenarnya, yang contohnya diberikan
pada Gambar 5.11 terlihat bahwa variasi harian vr"EC di suatu
tempat akan bervariasi dari hari ke hari dan dari bulan ke bulan.
contoh ini adalah hasil pengamatan di stasiun Hamilton, AS (da-
erah lintang menengah) pada buran Februari dan Juni tahun 1989
yang secara siklus aktivitas matahari merupakan tahun solar mak-
sirnurn. Untuk lokasi,
tik detail dari variasi
beda.
bulan, dan tahun
harian VTEC ini
I'rttltrtrltt:;t llttttytl I l.t
yang berbeda, karzrl<l cl'i s
umumnya akan juga ltt:r'
5:00_6:0o I4:UU '.2',2'.U0-2J:uu
Gambar 5.10 Idealisasi variasi harian dari VTEC
560rn
3
?40r
F
360E]
3
840F.
2020
o 3 6 9 L2 1.5182124
waktu Lokal
o 3 6 9 1215782t24
waktu Lokal
Gambar 5.11 Contoh nilai VTEC harian dalam waktu sebulan
yang diamati di stasiun Hamilton, MA, AS;
d,arifKlobuchar & Kunches, 2000]
Dari Gambar 5.11juga terlihat bahwa pada malam hari, seiring
d.engan melemahnya radiasi matahari terhadap lapisan ionosfer,
maka nilai VTEC secara umum akan mengecil dibandingkan pada
siang hari. Perlu ditekankan di sini bahwa pada penentuan posisi
atau survai dengan satelit, jadwal pengamatan satelit sebaiknya
disesuaikan dengan variasi harian dari aktivitas ionosfer tersebut,
kecuali kalau receiver satelit dua frekuensi digunakan.
A
22:OO-23:OO
Februari 1989 Juni 1989](https://image.slidesharecdn.com/1520geodesisatelit-160412154021/85/geodesi-satelit-survey-62-320.jpg)
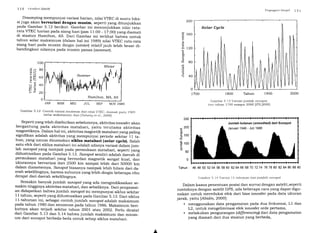
![A -A
dt op = j {n(s}-tl.ds = l0-b. I N(s).ds.-RR,
dimana n(s) dan N(s) adalah indeks refraksi dan refraktivitas
sepanjang jalur sinyal satelit dalam lapisan troposfer, dari titik
pengamat R sampai titik di lapisan atas troposfer A.
Untuk dapat mengestimasi besarnya bias troposfer pada persa-
maan (5.15) di atas, maka nilai indeks refraksi, atau denga, kata
lain nilai temperatur, tekanan, dan kelembaban di titik-titit se-
panjang lintasan sinyal harus diketahui. Karena secara praktis hal
ini sulit untuk direalisasi, maka umumnya bias troposrei ini diesti-
masi dengan menggunakan data temperatur, tekanan, dan kelem_
baban udara yang diukur di permukaan bumi.
Dalam pengestimasian besarnya bias troposfer ini, dikenal be-
berapa model standar troposfer, yaitu antara lain model-model
Hopfield, Saastamoinen, Black, Marini, dll. Dari beberapa model
tersebut yang cukup banyak digunakan dalam pengolairan data
satelit seperti GPS adalah model Hopfield dan Saastamoinen.
5.6.1 Model Hopfield
Pada model Hopfield, besarnya bias troposfer diestimasi sebagai
penjumlahan dari komponen basah dan komponen kering sebagai
berikut:
l'ro1ttulrt:,r iirrtt1rtl I Itt
N,r,,.,, : (77,64) (p/T)
N,u,,,,, = - (12,96)(elT) + (3,718.10s)(e/T'?)
dimana p adalah tekanan atmosfer (mbar), e adalah tekanan par-
sial dari uap air (mbar), dan T adalah temperatur ('K), kesemlranya
di permukaan Bumi.
Pada persamaan (5" 19) dan (5.20), h. dan h.,masing-masing ada-
lah ketinggian lapisan kering dan basah yang cliformulasikan seba-
gai:
I I tt (ieorlt:si SateLtt
d,.oo=doo*d-.t
[s.1s)
(s.16)
(s.17)
(s.18)
(s.1e)
(s.20)
(1r.2 l)
(s.2'21
h,, = 40136 + 148,72(T - 273,16lr
h = 11000 m
Besarnya fungsi pemetaan dari arah zenith ke arah satelit pada
persamaan (5.17) dan (5.18) diformulasikan sebagai berikut:
(s.23)
(s.241
(s.2s)
(s.26)
m{,
mf
1 / [ sin (E'?+ 6,25)os]
1/ [sin(E2+2,25)os]
dimana E adalah sudut elevasi satelit dalam derajat.
5.6.2 Model Saastamoinen
Pada model Saastamoinen, besarnya bias troposfer dihitung de-
ngan menggunakan rumus berikut lSaastamoinen, 1973]
dimana komponen kering (du*) dari komponen basah (d*",) tersebut
diestimasi dengan formula Giit<ut [Hopfietd., 1969|
d.ory mf.. d. 'o dry
d*., = mf.. d*",,
(s.27)
dimana p adalah tekanan atmosfer (mbar), e adalah tekanan par-
sial dari uap air (mbar), T adalah temperatur ("K), dan z adalakt
sudut zenit}r ke satelit yang diamati.
Rumus di atas selanjutnya diperbaharui dengan menambahkan
dua faktor koreksi, dimana faktor pertama bergantung pada ke-
tinggian dari lokasi pengamat, dan faktor kedua bergantung pada
ketinggian serta sudut zenith dari satelit. Model Saastamoinen yang
telah diperbaharui ini mempunyai formulasi sebagai berikut
lBauersima, 19831:
0,002277 ) p .l 12y*
o,os'l.e _ r"n, , I
dtrop= cosz I t ) I
0.002277 {
dtrop= cos, 1t.(ff+o,os)e*B.tan2,|.0*
Pada persamaan di atas, mfn dan m{ adalah fungsi pemetaan
(mapping functionl untuk komponen t<eiing dan baihi dan d.,o,
9"1 d*",' adalah komponen kering dan basah dari bias troposijr
dalam arah zenith yang dapat diformulasikan sebagai:
d."dry
dz-
(10'6/5). Noo,o. ho
(106/5). N . h, wet.o w
Nur,"-d3l N*.,,,o P?dd persamaan di atas masing-masing adalah
r-efrakti'itas kering dan trasah di permukaan birmi, yaig dapat
dinyatakan sebagai berikut:
[s.28)
Pada rumus di atas, nilai faktor koreksi B dapat diinterpolasi dari
nilai-nilai yang diberikan pada Gambar 5. 16, dan nilai faktor koreksi
6R dapat ditentukan dengan menggunakan Tabel 5.4 lHoffirunn-
Wellenhof et al., 19971.](https://image.slidesharecdn.com/1520geodesisatelit-160412154021/85/geodesi-satelit-survey-65-320.jpg)
![Nilai B (mbar)
l').O ( ittttlr':;t SutIltt
Ketinggian (km) B (mbar)
0,0
0,5
1,0
1,5
2,0
2,5
3,0
4,0
5,0
1,156
1,079
1,006
0,938
0,874
0,813
0,757
0,654
0,563
'1,5
1,25
1
0,75
0,5
0,25
COS_I'
- b(E)
l,'*L
nu
)'
( r)
(s.so)
^l)MI
.o"2E
( t.t', 2
l1+ ' w I
I r)/
- b(E)
(s.3 r )
Gambar 5. 16 Nilai faktor koreksi B pada model Sastamoinen
dimana r adalah jarak geosentrik dari stasiun pengamat, h. dan h."
adalah seperti diformulasikan pada persamaan (5.23)dan (5.24) dan
l. adalah seperti yang diformulasikan pada persamaan berikut:
l" = 0,167 - tp,076 + 0,0001S.(T-273)l e-o.3E (s.32)
dimana T adalah temperatur ('K) dan E adalah sudut elevasi dari
satelit (dalam derajat). Sedangkan koreksi akibat adanya peleng-
kungan (bending) sinyal, b(E), pada persamaan (5.30) dan (5.31)
diformulasikan sebagai berikut:
b(tr) = 1,92/(82 +0,6) (s.33)
Perlu dicatat bahwa untuk elevasi satelit (E) di atas 3Oo, Black
(1978) mengajukan formulasi sederhana berikut untuk mengesti-
masi bias troposfer:
d,.on = 2,31. p. cosec E * k". cosec E
dimana p adalah tekanan udara (dalam atm), dan k* adalah
konstanta empirik regional yang nilainya diberikan pada tabel 5.5
berikut.
(s.34)
5.6.4 Fungsi-fungsi Pe met aara lMapping Functionsl
Dari model-model estimasi bias troposfer di atas terlihat bahwa
fungsi pemetaan berfungsi untuk mentransformasikan bias tropos-
fer dalam arah vertikal ke bias troposfer dalam arah ke satelit. Se-
5.6.3 Model Black
Pada model Black,.besl3y" bias troposfer dihitung dengan meng_gunakan rumus berikut fBlack, t97g]:
d,.oo : m{,". doo' + mf*b. d*.t' (5.2e)
dimana komponen kering dan basah dari bias troposfer dalam arah
il]tld"",'dan d*.,,, dihitung seperti pada model Hopfield, dengan
menggunakan persamaan (5.19) sampai (5.24).
Sedangkan besarnya fungsi p"-.t"r., (mapping function) untukkomponen kering (mfob) dan basah (mf*b) di aias,lilrii""s denganpersamaan berikut:
Tabel 5.4 Nilai faktor koreksi 5R pada model Saastamoinen
I(etinggian stasiun di atas p..rr,uk"ro-rrt 1ffi
60.00,
66" 00,
70.00,
73.00,
75. 00,
76" OO'
77" oo,
78.00,
78.30,
79" OO'
79" 30,
79" 45'
80.00,
0,003
0,006
o,o12
o,o20
0,03 1
0,039
0,050
0,065
0,075
0,087
o,102
0,1 11
o,121
0,003
0,006
0,01 I
0,018
0,028
0,035
0,045
0,059
0,068
o,o79
0,093
o,101
0,1 10
0,002
0,005
0,o 10
o,o17
0,o25
o,o32
0,04 1
0,054
o,062
o,o72
0,o85
o,o92
0,100
0,002
0,005
0,009
0,01s
o,o23
o,o29
0,037
o,o49
0,056
0,065
o,o77
0,083
0,091
0,002
0,004
0,008
0,013
0,021
o,026
0,033
o,o44
0,051
0,059
0,070
o,076
0,083
0,001
0,003
0,00s
0,009
0,014
o,017
o,o22
0,030
0,034
0,040
o,o47
0,052
0,056
o,oo2
0,003
0,006
0,011
o,or7
o,o2L
o,o27
0,036
o,o42
o,o49
0,o58
o,063
0,068
0,001
o,oo2
0,004
0,007
0,0r 1
0,014
0,018
o,024
0,028
0,033
0,039
0,043
o,o47
Tabel 5.5 Nilai k* untuk beberapa region pengamatan
Nilai k Berlaku untuk
o,28 mus m panas di daerah tropik atau lintang menengah
o,20 mus m semr atau gugur di daerah lintang menengah
o,12 musim dingin d daerah lintang menengah (lautan)
0,06 musim dingin di daerah lintang menengah (daratan)
o,o5 daerah kutub
&](https://image.slidesharecdn.com/1520geodesisatelit-160412154021/85/geodesi-satelit-survey-66-320.jpg)
![| 2'2 ( ir'or/c.st Srrlc/il
cara teoretis, fungsi pemetaan akan bergantung pada sudut elevasi
satelit serta kondisi meteorologis, dan ketelitian nilai fungsi ini akan
menentukan ketelitian koreksi troposfer untuk data ukuran jarak
yang bersangkutan.
Untuk sudut elevasi mendekati 900, fungsi pemetaan yang se-
derhana biasanya sudah memadai. Tapi untuk sudut elevasi yang
relatif rendah, fungsi pemetaan yang lebih canggih dan realistis
dengan karakteristik atmosfer Bumi akan diperlukan.
Selain fungsi-fungsi pemetaan yang telah ditunjukkan pada
model Hopfield, Saastamoinen, dan Black di atas, ada beberapa
fungsi pemetaan yang relatif lebih canggih, yaitu antara lain fungsi-
fungsi Marini, Davis, Chao, dan Lanyi. Fungsi-fungsi pemetaan ini
dapat digunakan dengan model-model bias troposfer lainnya. For-
mulasi dari beberapa fungsi pemetaan tersebut akan diberikan se-
cara singkat berikut ini.
mf(E) a
sinE+ 1-
U
tauE+
tanE+c
dimana koefisien a, b, dan c pada persamaan di atas dihitung dari
persamaan berikut:
a = O,OO1185.[1 + 0,6071'1Ou'(p - 1000) - O'1471'10-3'e
+ o,3o72.10,.(T _ 2Ol + 0,1965.10_1.([} + 6,5)
- 0,5645.1O-')'(hr - 11,231)) '
b = 0,O01 144.|l + O,1164.10'o.(p - 1000) - O'2795'lO'3'e (5'39)
+ 0,3109,10_,.(T - 2Ol + 0,3038.10 1.(p + 6,5)
- o,1217'lo''.(hr - 11,23r)) '
c = -0,0090 .
Pada persamaan (5'39) di atas' p adalah tekanan permukaan
(mbar), e adalah t"i.".r.,, parsial dari uap air di permukaan (mbar)'
i adaiah temperatur permukaan (oC), B adalah kecepatan penu-
runan temperatur a"fl* troposfer 1o'C7t<m1' dan h' adalah tinggi
tropopause (km).
Menurut Spitker(1996), model fungsi pemetaan Davis ini telah
dibandingkan d.ngan hasil rag-tracing, dan hasil.yang. diperoleh
menunjukkanbah"wamodelinimempunyaiketelitianlebihbaik
Ja.i 2,6 cm meskipun pada elevasi serendah 50'
(s.38)
Ittngsi pemetaan Marini
berkelanjutan seperti berikut
mf(E) =
diformulasikan dalam bentuk fraksi
[Marini, 1972, Spilker, 1996]:
1
a
lsinE+
sinE+ (s.3s)
sinE+ 9---
sin E + ........
dimana a, b, c, .... adalah konstanta-konstanta.
Dengan menggunakan bentuk umum yang diajukan Marini di
atas, Chao menyusun suatu fungsi pemetaan untuk komponen
kering dan basah sebagai berikut lChao, 1974; Spilker, 19961:
mfo(E)
0.0o143
sln l, +
tan E + O,O445
0,ooo35
SIN11+
tan E + O,017
(s.36)
mf (E)
w
(s.37)
Davis juga telah memformulasikan suatu fungsi pemetaan tro-
posfer untuk komponen kering (hidrostatik) yang cukup canggih,
seperti berikut lDauis et al., 1985; Spilker, 19961:](https://image.slidesharecdn.com/1520geodesisatelit-160412154021/85/geodesi-satelit-survey-67-320.jpg)
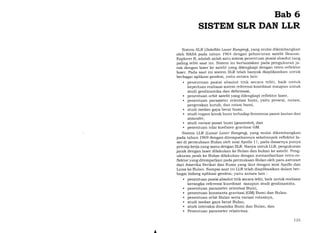
![l'2tt ( itttlt':,t Srttt,lil
6.I PRINSIP KERJA SISTEM SLR
Sistem SLR berbasiskan pada pengukuran jarak dengan meng_
gunakan pulsa laser yang ditembakkan dari suatu stas=iun Bumi
ke satelit yang dilengkapi dengan sejumlah retro-reflektor. pulsa
ini selanjutnya dipantulkan balik ke stasiun yang bersangkut3n,
seperti yang diilustrasikan pada Gambar 6.r. Dalam hal ini jarak
ke satelit (d) dapat, ditentukan dengan persamaan berikut:
dimana At adalah waktu tempuh raser dari stasiun Bumi ke satelit
dan kembali lagi ke stasiun Bumi, dan c adalah kecepatan cahaya.
I J", At"* 1 r
| "pZii,:6,1*;
| .----- l;;l-li"t;;;w;;ilrl
- -l Ldtcr
| ,"^"*n!
Penerima
(Teleskop)
6.1 Prinsip dan skema kerja sistem SLR [Seeber, 1993]
/@,/. / Satelit
,/ y dengan
. / reflektor
Pengukuran jarak ke satelit di'lakukan pada saat_saat satelitmelintas di atas stasiun pengamat. Dengan menggunakan data-data pengukuran jarak ini serta informali orbit Jit.iil maka se_
lanjutnya koordinat dari stasiun di Bumi dapat ditentukan.
Pemancar laser modern umumnya menggunakan laser Nd:yAG
(neodgmium gttrium garnet), yang alpat membangkitkan sinar la_
ser hijau dengan panjang getomLang 532 nm d";g;;;lsa yang
sangat pendek selebar 30 _ 200 ps serta frekuensi 5 _ lO Hz
[Montenbruck & Giil, 2OOO].
-.-
Geometri pengamatan SLR serta persamaan matematis yang ter_
libat tidaklah sesedel!1"" ilustras-i yang diberikan pada Gambar
6.1 serta persamaan (6.1). Secara leUih rinci geom"trif"rrg"*at".,
SLR ini ditunjukkan pada Gambar6.2 berikut. Merrgacu p"i" c^*-bar ini, maka persamaan pengamatan jarak (d) pada SLR dapatdiformulasikan sebagai berikui(Aard.oom et at., tOgZl:
At
ad.
Ad
Ad,
ad.
n
.Srslcrrr .SL/l rltur l,l.l" l'.t'i
data ukuran waktu tempuh pulsa laser,
koreksi eksentrisitas di tanah,
koreksi eksentrisitas di satelit,
delay sinyal di sistem tanah (ground sysfem),
koreksi refraksi, dan
kesalahan random dan bias yang tersisa.
(6.3)
'3-r/K
d=c.Lt/2
d = c.Lt/2 + Ado + Ad" + Adb + Ad. + r.;
dimana:
ir_
tJ-a D-D"tr-]
I
xomputerl
Gambar
(6.1)
Untuk SLR, refraksi yang disebabkan oleh lapisan troposfer
umumnya dikoreksikan dengan menggunakan formulasi dari Marini
& Murray yang juga direkomendasikan dalam Standar IERS
lMcCarthg,1989]. Sedangkan efek dari refraksi ionosfer pada prin-
sipnya dapat diabaikan untuk frekuensi optik dari sinar laser.
Koreksi refraksi untuk jarak ukuran dengan model Marini &
Murray tersebut dihitung dengan formulasi berikut lSeeber, 1993]:
A+B
' r1q,H; sinE +
",11,
;l|f
Pada persamaan di atas:
A = O,002357 Po + 0,000141 eo
B = 1,084. 1o-8.Po.To.K + 4,734.1O'8
Ad
tTo
t
Perlfeteksi Sinyal,
Elektronik Receiver Ref. Seeber(1993)
Gambar 6.2 Geometri pengamatan SLR
(6.2)
K = 1,163 - 0,00968.cos 2rp - 0,00104.T0 + O,0OOO1435.Po
(6.41](https://image.slidesharecdn.com/1520geodesisatelit-160412154021/85/geodesi-satelit-survey-69-320.jpg)
![I 2ll ( irtrlr,sr .Srrlr'/rl
<lirnana:
tr = elevasi sebenarnya dari satelit (derajat),
Po = tekanan udara pada stasiun pengamat (mbar),
T. : temperatur udara pada stasiun pengamat (oK),
€o = tekanan uap air pada stasiun pengamat (mbar).
Sedangkan parameter. frekuensi laser f(),) adalah:
f(t) = 0,9650 + 0'0164
+ o'ooo22g
).2 ),,4
dan fungsi lokasi stasiun laser f(<p,H) adalah:
f(q,H) = 1 - O,OO2O cos 2<p - 0,OOO31 H
(6 s)
(6.6)
,(r'l:;lr'ltt ,"/,,h' rlrttt l,l,lr' l:l(,
'l'ingkat ketelitian yang ditunjukkan pada Gambar 6..1 <li irt;ts
tidak terlalu jauh berbeda dari proyeksi kemampuan SLR yang <li
berikan oleh Cohen & Pearlman (1989) sebelumnya, yang ditunjuk
kan pada Tabel 6.1 berikut.
Tabel 6.1 Proyeksi kemampuan SLR fCohen & Pearlman, 1989]
6.2 SISTEM-SISTEM SLR
Pada dasarnya suatu sistem SLR akan terdiri dari stasiun peng-
amat (obseruatory) SLR serta satelit-satelit SLR. Bentuk suatu sta-
siun pengamatan SLR dicontohkan pada Gambar 6.4. Dari Gambar
ini terlihat-bahwa stasiun pengamatan SLR ini relatif cukup besar.
dimana l" adalah panjang gelombang laser (pm), serta p dan H adaiah
lintang dan ketinggian (dalam km) dari stasiun pengamat.
Perlu juga dicatat di sini bahwa titik referensi geometris pada
stasiun Bumi SLR umumnya tidak sama dengan titik nol peng_
amatan secara elektris. Bias ini umum dinamakan delay sinyal dan
besarnya ditentukan dengan proses kalibrasi sistem.
Tingkat ketelitian data ukuran jarak dengan SLR, dari tahun ke
tahun semakin teliti, seperti yang ditunjukkan pada Gambar 6.3
berikut. Gambar ini memperlihatkan bahwa tingkat keteritian ja-
rak SLR meningkat dari level beberapa meter pada tahu n 1964
hingga mencapai beberapa mm pada saat ini.
1m
1e85 / lsso
tr
{J
a
o
.r 10 cm
q
O
k
p.
1cm
1970 101F 1 980
7988 7993 7998
. single shot noise
. normal point noise
' ranging machine errors
(ke s al ahan si st ematik)
. refraksi atmosfer
- model
- multicolor
. koreksi pusctt massa
' ePoch
7-3O mm
2-4 mm
5-10 mm
5mm
3 rnm
lOO ns
(0,5 mm)
2-3 mm
1mm
2-5 mm
4mm
2mm
1mm
5O ns
(0,3 mm)
7 mrn
<7mm
3mm
7mm
1O ns
(0,1 mm)
Gambar 6.3 Ketelitian ukuran jarak SLR [/I,RS, 2000]
'1995
Gambar 6.4 Contoh bentuk stasiun pengamatan SLR](https://image.slidesharecdn.com/1520geodesisatelit-160412154021/85/geodesi-satelit-survey-70-320.jpg)
![I.iO (irrrr.lr:.si Salr,/rl
Pada saat ini terdapat sekitar 4O-an stasiun pengamat SLR.yang
tersebar di seluruh dunia, seperti yang ditunjrt t .-r, pada Gambar
6'5' Dari Gambar ini terrihat bahwa stasiun p..rg.*.i sLR banyak
terdapat di Eropa dan Amerika Utara.
Rerkaitan dengan satelit SLR, sampai saat ini sudah banyak
satelit yang memang khusus didedikasikrn untuk misi sLR danjuga banyak sistem saterit lainnya, seperti saterit navigasi dan sa-
telit altimetri, yang diiengkapi dengan retro-reflektor untuk peng-
ukuran jarak dengan laser.
Tabel 6.2 menunjukkan beberapa satelit yang pernah atau ma_
sih dilengkapi dengan retro-reflektor. Tetapi pe-rtu aicatat di sini
bahwa ILRS (rnfernationar Laser Ranging seiuiie) punya skara prio-
ritas dalam penjejakan satelit-satelia SLR.
- Prioritas yang digunakan oleh ILRS untuk penjejakan satelit di-
dasarkan pada parameter orbit satelit serta t<epeituan dari misi
satelit yang bersangkutan, yaitu sebagai berikui[IlRg 2000]:
1' Prioritas akan berkurang dengan semakin tingginya orbit dan
pada tinggi tertentu dengan semakin besarnyaliklinasi orbit.
2' Prioritas dari beberapa sateiit dapat diiingkatkan untuk
,Stslr'lt S/,/r' rlrtrt l,l.h' l .t I
mendukung misi-misi yang aktif (seperti satelit altimetri), pro.yr:k
spesial (seperti IGEX 98) atau post-launchintensiue tracking pha'
SCS.
3. Modifikasi kecil dalam urutan prioritas dapat diubah sesuai
dengan tuntutan yang bertambah dari komunitas pengolah data
SLR.
Berdasarkan kriteria-kriteria di atas, sebagai contoh pada De-
sember 1999, ILRS Gouerning Board menetapkan skala prioritas
penjejakan satelit SLR yang ditunjukkan pada Tabel6.3 berikut.
Gambar 6.5 Distribusi stasiun pengamat SLR IIISB 2000j
Tabel 6.2 Satelit Dengan Reflektor Laser lSeeber, 1993].
1 2 3 4 5 6
BEACON-B
BtrACON.C
GEOS.l
DIADEMB-1
DIADEME.2
GEOS-2
PEOPLE
NTS.1
STARLETTE
GEOS-3
CASTOR Ds.B
LAGEOS-I
NTS.2
INTERCOSMOS-17
SEASAT-1
TANSEI-4
INTERCOSMOS_22
AJISAI
MBTEOSAT.P2
ETALON.l
ETALON-2
ERS.l
TOPEX
LAGEOS.2
STELLA
964
965
965
967
967
968
970
974
97s
975
9'.75
976
977
977
978
980
981
986
988
989
989
991
992
992
993
USA
USA
USA
France
France
USA
France
USA
France
USA
France
USA
USA
USSR
USA
Japan
USSR
Japan
ESA
USSR
USSR
ESA
USA
USA
Fralce
1,09
r,32
2,27
1,35
1,85
1,61
o,75
t3,77
1,11
0,84
t,2a
5,94
20,24
0,51
o,77
o,60
0,89
1,50
39,79
19,15
19,15
o,7a
1,33
5,90
0,80
0,89
o,94
I,r2
0,53
0,58
1,08
o,52
13,4 5
o,81
o,83
o,27
5,84
20,t2
o,46
o76
o,52
o,79
1,44
35,78
10,10
19,10
o,77
79,7
41,2
59,4
40,o
39,4
105,8
15,0
r25,1
49,4
1 15,0
,qq
109,8
64,O
82,9
108,0
38,7
81,2
50,0
0,1
64,9
65,4
98,5
63,O
52,6
98,0
Penielasan Kolom
7.
2.
Nama Satelit
Tahun Peluncuran
Negara pemilik
4. Tinggi apoogee (satuan 1000 km)
5. Tinggi perigee (satuan 1000 km)
6. Inklinasi orbit (derajat)](https://image.slidesharecdn.com/1520geodesisatelit-160412154021/85/geodesi-satelit-survey-71-320.jpg)
![l.t.l t irrrrlr.:ir Srrlr'/rl
S:rlah satu satelit SLR yang terkenal yang banyak diaplikasikan(lalam bidang Geodesi aclalah LAGEos (Laier cloayna,ilics safer_/i/e)' Bentuk geometris dari saterit ini ditunjukt<aniada Gambar
6'6, dan karakteristiknya yang lebih rinci darisaterit diberikan padaTabel6.4.
Perlu juga dicatat di sini bahwa disamping stasiun pengamatan
(ob se.ruatory) yang statik untuk pengamatan satelit-sateiit sLR; paaasaat ini juga sudah banVlk stasiuripengamatan yang mobil, dapatdipindahkan dari satu lokasi ke tokasi be.ga.rtuig k;p;;i;"..
Tabte 6.3. Prioritas penjejakan satelit oleh ILRS per Des. Iggg.
.Srsllttr .S/,/r' tlttrr l,l,l"
Tabel 6.4 Karakteristik LAGEOS UIRS, 20001
l.r.r
retro reflector
47,62mm
Gambar 6.6 Geometri satelit LAGEOS
[Seeber, 1993; Kramer, 1996]; tubuh sa-
telit ditempeli dengan 426 buah
retroreflektor
LAGEOS-1 LAGEOS-2
Sponsor
Ekspektasi hidup
Aplikasi utama
COSP,C.R ID
SIC Code
NORAD SSC Code
Peluncuran
RRA Diameter
RRA Shape
Reflectors
Orbit
Inklinasi
Eksentrisitas orbit
Tinggi Perigee
Periode
Berat
United States
beberapa dekade
Geodesi
760390r
1 155
aa20
May 4, 7976
60 cm
sphere
426 corner cubes
Lingkaran
lO9,a4 degrees
0,0045
5.860 km
225 rner,it
411kg
United States & Italy
beberapa dekade
Geodesi
9207002
5986
22195
October 22, 1992
60 cm
sphere
426 corner cubes
Lingkaran
52,64 degrees
0,0135
5.620 km
223 menit
a05 kg
Prioritas Misi Sponsor Ketinggian
(kinl
Inklinasi
(derajat)
CHAMP GFZ 429-474 87,27
2 GFOl US Navy 790 108,0aJ ERS2 ESA 800 98,6
4 TOPEX/
Poseidon
NASA/CNES 1.350 66,O
5 Sunsat Stellenbosch
University
650
6 Starlette CNES 815-1 100 49,8
7 WESTPAC WPLTN 835 98
B Stella CNES 815 98,6
9 BeaconC NASA 950- 1 300 41
10 Ajisai NASDA 1.485 50
11 LAGEOS2 ASI/NASA 562s 52,6
t2 LAGEOSI NASA 5850 109,8
13 GLONASS8O Russian
Federation
19100 65
14 GLONASST8 Russian
Federation
19100 65
t5 GLONASSTg Russian 19100 65
16 GPS35 US DoD 20100 54,2
17 GPS36 US DoD 20i00 55,0
18 Etalon I Russian
Federation
19100 65,3
t9 Etalon2 Russian
Federation
19100 6s.2
'e_J/_C Cm
-](https://image.slidesharecdn.com/1520geodesisatelit-160412154021/85/geodesi-satelit-survey-72-320.jpg)
![I .]4 ()cotlt:si Sctt.elit.
Menurut [ILRS, 2000] ada beberapa misi satelit di masa menda-
tang yang dilengkapi dengan retro-reflektor laser, yaitu :
. ADEOS-2
. ALOS
. ENVISAT
. ETS-VIII
. GFO-2
. Grace
. Gravity Probe B
. TCESAT (GLAS)
. IRS-P5
. Jason (TOPEX/poseidon follow-on)
. VCL
Perlu dicatat di sini bahwa misi-misi satelit di atas pada dasar-
nya bukan didedikasikan khusus untuk sLR. sebagai contoh, misi
utama dari satelit ADEos-2 adalah penginderaan jauh dan Jason
adalah sistem satelit altimetri.
6.3 APLIKASI SLR
sistem sLR terutama diaprikasikan untuk penentuan posisi ab-
solut titik secara teliti, baik untuk keperluan realisasi sistem refe-
rensi koordinat maupun untuk studi geodinamika dan deformasi.
Disamping itu sLR dimanfaatkan untuk penentuan parameter-pa-
rameter orientasi bumi serta medan gaya berat bumi. sLR juga
digunakan dalam penentuan orbit satelit yang dilengkapi dengan
reflektor laser. Bidang aplikasi dari SLR
".*.ki., r.r.tr." dengan
semakin meningkatnya tingkat presisi ukuran jarak yang dicapai.
Hal ini diilustrasikan pada Gambar 6.7 berikut ini.
- :
-Tektonik Lempeng
-Deformasi kerak Bumi
Medan Gaya berat _pasang surut
-Rotasi Bumi
- Intra Pl ate Deform ati on
-Orientasi Bumi resolusi tinggi
3m 1m 30cm 10cm 3cm 1cm (1-3mm)
1965 1970 1975 1980 1985 1990 1995
Si.stcrn .SL/l rlon LLll I :lll
Perlu dicatat di sini bahwa informasi tentang orientasi dan lokasi
dari sumbu rotasi Bumi ini akan sangat bermanfaat dalam mem-
pelajari perubahan yang terjadi dalam distribusi massa Bumi serta
pertukaran momentum antar sub-sub sistem dalam sistem Bumi.
1994
7992
1990
1988
Jd 1986
F
1984
198 1
o
z, (O,OO1")
o,2 0,15 0,1
Y, (arc sec)
1994
t992
1990
1988
1986
1984
198 1
Gambar 6.8 Pergerakan kutub dari SLR ULRS, 2O0Ol
Sistem SLR juga dimanfaatkan untuk memantau aariasi sekular
darl pergerakan kutubyang disebabkan oleh post'glacial rebourud
dan perubahan sekular dalam keseimbangan massa lempengan es.
Contoh variasi sekular posisi kutub dari tahun 1906 sampai de-
ngan 1991 ditunjukkan pada Gambar 6.9. Dalam Gambar ini data
SLR dimanfaatkan sejak tahun 1972.
200
yp (0,001")
0,05
kutub;
2O001
c)
o)
o
lr
d
o.
X
-0,05
o
0,05
0.1
ILS: 1906- 1972
SIR: -1972 - 1991
1991
t952
L966
1986
1963
1906
0,35 o,3 0,25
Gambar 6.7 Aplikasi SLR sebagai fungsi dari
tingkat presisi ukural jarak; d,ari fseeber, 19931
SLR dapat digunakan untuk menentukan parameter_parameter
orientasi Bumi. Sebagai contoh Gambar 6.g menunjukkan posfsi
kutub serta orientasr sumbu rotasi Bumi, dari tahun 19g 1 sam-
pai 1994, yang ditentukan dari data pengamatan SLR [ItRg 2000].
A
Gambar 6.9 Va;iasi sekular posisi
' kontribusi SLR sejak 1972 IILRS,
-0,05](https://image.slidesharecdn.com/1520geodesisatelit-160412154021/85/geodesi-satelit-survey-73-320.jpg)
![l.l(r ( ir',t,lt ;t iltlt lrt
I']e rlu juga dicatat di sini bahwa dengan memperajari variasi tem_poral dari komponen koordinat vertikit dart tiiik, 'rro;;"
dapatmemberikan gambaran tentang respon kerak Bumi terfaaap ye-rtomenq' pasq'ng surut lqutq.n d,an atmosfer. Hal ini ditunjukkanpada Gambar 6.10 berikut.
"!irs/r,rrr S/,/i tlttrt l,l.li l.l'i
SLR juga dimanfaatkan'untuk menentukan nilo;i koefisten GM,
yaitu perkalian konstanta gravitasi dengan massa Bumi. (iarnlrrrr
6.12 menunjukkan variasi nilai tahunan GM (terhadap nirai rr,nrr
nal 398600 km3/sec2) yang ditentukan dari data beberapa sartr.lrr
sLR. Gambar ini juga mengindikasikan tidak adanya variasi se l<rrLrr
pada nilai GM.
Gambar 6 12 Nilai GM yang ditentukan dengan SLR, terhadap
nilai nominal 398600 km3/sec, fSmith et al., 2OOOI
Karena kemampuannya untuk menentukan parameter koordinat
secara teliti sampai ke tingkat ketelitian beberapa mm, SLR juga
banyak dimanfaatkan untuk studi-studi geodinamika d.an
deforrnasi. Gambar 6. 13 menunjukkan vektor pergeseran dari
beberapa stasiun SLR yang terdapat di kawasan mediterania dan
daratan Eropa.
4.0
E
E
9 o.o
g
3 zo
E
o -4,0
-6,0
-8,0
081624324048
Hari ditahun 1989
Gambar 6.10_ trfek pasut dan tekanan atmosfer,
ditentukan dengan SLR [IrRg 2000]
Disamping parameter orientasi Bumi, SLR juga dapat diguna-kan untuk memperaja ri uariasi pr"i"i irn pusatBumi (geocenter) .Gambar 6' 11 berikut menunjukian variasi pusat Bumi dalam kom-ponen (X,Y), dari tahun 1987 sampai 1993, yang ditentukan darianalisa data SLR.
9592
E
E
X
o0
oq
E
o
E
E
c
on
o
E
o
<
-30
89
1 993
'1987
-+-lageos I
--o- lag€os 2
t] elalon 'l
r etalon 2
x ajisai
a starlette
o stelle
Gambar 6.11 Variasi pusat Bumi (g eocent er), I IUt S,,2OOO]
Gambar 6. 13 Vektor pe rgeseran titik dari SLR UVASA-GSFC, 20001](https://image.slidesharecdn.com/1520geodesisatelit-160412154021/85/geodesi-satelit-survey-74-320.jpg)
![I :Jl't (it'orltsi Sutt,h.t
Beberapa aplikasi lainnya dimana sLR berkontribusi secara lang-
sung maupun tak langsung adalah [II,RS, 20OO]:
' kalibrasi altimeter radar dari sistem satelit altimetri;
' pemantauan perubahan muka laut, dimana sLR berkontribusi
dalam penentuan orbit satelit altimetri secara teliti serta dalam
penentuan perubahan ketinggian stasiun pengamatan di
kawasan pantai;
' studi variasi gaya berat akibat redistribusi massa di atmosfer,
hidrosfer dan dalam Bumi; serta
. studi interaksi antara inti dan mantel Bumi.
Secara umum, hal-hal yang telah dicapai dan diselesaikan de-
ngan menggunakan teknologi SLR, diberikan pada Tabel 6.5.
,'jr.slcrrt ^S/,[' tltttr l,l.L' l.l()
6.4 SISTEM LLR
Prinsip kerja sistem LLR adalah sama dengan sistem SLR' Ha-
nya kalau pada SLR, retro-reflektor ditempatkan di satelit, pada
LLR retro-reflektornya ditempatkan di permukaan Bulan. Reflektor
LLR di Bulan ditempatkan oleh para astronot dari misi Apollo (usA)
dan Luna (Rusia). sistem LLR mulai diimplementasikan sejak ta-
hun 1969.
Distfibusi lokasi dari reflel<tor LLR yang ditempatkan di Bulan
ditunjukkan pada Gambar 6.14 berikut. Sebenarnya sudah ada 5
kelompok reflektor yang ditempatkan di Bulan. Namun satu ke-
lompok yang ditempatkan oleh awak Luna 17 tidak bisa diguna-
kan, karena tertutup debu. Sejarah penempatan dari kelompok
retro-reflektor tersebut diberikan pada Tabel 6.6.
Tabel 6.5 Pencapaian teknologi SLR ICDDIS, 2001]
Pencapaian
. Posisi stasiun ditentukan sampai ketelitian 2O m.
. SLR memberikan skala untuk pengukuran satelit ge_
1970 - 74
sampai ketelitian sub-meter.
. Posisi stasiun ditentukan sampai ketelitian 5 m.
. Data SLR meningkatkan kualitas model gaya berat
berpanjang gelombang panjang.
., $LR dikombinasikan dengan data gaya berat permu_
ikaan meningkatkan kualitas moaet gaya berat
' berpanjang gelombang menengah.
. SLR menentukan pergerakan kutub (satu komponen)
t975 - 79 . Pengukuran tektonik lempeng yang pertama dengan
SLR dengan proyek SAFE.
. SLR menentukan orbit satelit altimetri GEOS_3 dan
Seasat.
1980 - 84 . Penemuan korelasi yang kuat untuk pertama kalinya
antara pergerakan tektonik kontemporer dengan model_
model geologi.
. SLR meningkatkan presisi GM sekitar 10 kali.
. Respon dinamis dari konveksi internal teramati.
. Efek dari perubahan lempengan es d,an post_glacial re_
bound teramati.
. BIH bergantung pada SLR, LLR, dan VLBI untuk pe_
mantauan kutub dan orientasi Bumi.
. SLR/VLBI menetapkan kerangka referensi terestrial per_
tama berketelitian cm.
. Pendeteksian sinyal pasut lautan dan Bumi.
. Pembangunan model pasut laut yang realistis.
larjutantabel 16.5
Periode Pencapaian
. Melalui korelasi yang kuat dengan pergerakan kutub
dari SLR, peran angin atmosfer dan EOP (Earth Orien-
tation Parameterl lebih dimengerti.
t990 - 94 . Pergerakan lempeng kontemporer diukur dengan reso-
lus;. sampai mm/tahun.
. SLR mendefinisikan skala terestrial (GM) dan titik asal
kerangka pada level beberaPa mm.
. Variasi-variasi waktu zonal berkorelasi dengan tekan-
an atmosfer global dan redistribusi massa lautan.
. TOPEX dengan penjejakan oleh SLR dan RF memberi-
kan topografi lautan dan tinggi gelombang berketelitian
cm serta menunjukkan adanya perubahan MSL global
sebesar 3 mm/yr.
1995 -
sekarang
. SLR mengukur pergerakan geocenter yang disebabkan
oleh fenomena Pasut.
. SLR mengamati adanya bias dalam skala waktu
paleomagnetik yang dikonfirmasi oleh para geochronolo-
gist.
. Medan gaya berat SLR mengkonstrain model-model
pasut, serta sirkulasi lautan dan atmosfer global'
. Kombinasi data SLR/altimetri meningkatkan kualitas
pendefinisian geoid laut.
. Pemetaan topografi es yang komprehensif untuk per-
tama kalinya dengan satelit altimeter ERS-1/2 yang
dijejak dengan SLR.
. Pemetaan topografi daratan dengan satelit altimetri yang
dijejak oleh SLR sedang dikembangkan.](https://image.slidesharecdn.com/1520geodesisatelit-160412154021/85/geodesi-satelit-survey-75-320.jpg)
![*i:i': iili-l;+$;;iiffi
Gambar 6.14 Distribusi lokasi retro_reflektor di Bulan IBKG,2OOOI
Tabel 6.6 Sejarah penempatan retro-reflektor di Bulan
[Seeber, 1993; BKG,2OOO]
contoh konfigurasi dari dua sistem reflektor yang a.a di Bulan,yaitu retro-reflektorApollo 14 dan Luna 21 ditunjuf.fi"" p"O" Gam_bar 6.15 berikut.
,'jr:;llrrr S/,lr' rlttrt Ll,li I.l I
Pa<ln saat ini ada empat stasiun pengamatan LLIi di clunia. viril r r
McDonald Obs.,Western Texas (USA), Haleakala, Hawaii (USA),
Grasse (Prancis) dan Wettzell (Jerman) . Distribusi keempat stasiun
ini ditunr'ukkan pada Gambar 6.16. Perlu dicatat di sini bahwa satu-
satunya stasiun yang melaksanakan pengamatan LLR secara kon-
tinyu sejak tahun 1969 adalah McDonald Observatory.
Gambar 6.17 Contoh stasiun penga-matan LLR [BKG, 2000]
6.5 GEOMETRI PENGAMATAN LLR
Geometri pengamatan LLR dapat diilustrasikan pada Gambar
6.18 berikut. Dari Gambar ini terlihat bahwa persamaan dasar be-
rikut bisa dituliskan, yaitu:
Sta-
pada
LLR
SA)
lam hal ini
itunjukkan
wa stasiun
ffiWWffi
; I !i.:-:-:)S,:ir:::=
w*l&.fi:igmmt[ * 'ffi*$iltilffiml -lw#:,*rtE t ,
ffii.Xfri#-lIE:RBffiE
rcreE
M
-
E
KEIT
a, Hawaii (US.
ngamatan LLR, da
Amerika Serikat, d
mbar terlihat bah
ffiWiWiWWffi{8{n-"t .
ffiffiffi.'I
ffi
WStasiun Haleakal
pe
di
Ga
it.
ii
i
Bentuk fisik dari stasiun tr
sion McDonald dan Haleakala r
Gambar 6. i7 berikut. Dari (
relatif cukup besar.
r l t t-:1 i*-:#"$-t:,:s::::::::::::: , a: : .:::: .. 1::t : :1Yi1t::::::a::: ::
::4... I ' ,.ilil,
'., I ", ,
',1 I :_-
E r F*: t
,* F!'{r,p
*' "1,', lr^"-]-----*n-**-
hrfrre$l il I Y
Stasiun McDona-ld (USA)
Gambar 6.16 Distribusi stasiun pengarnatan LLR [BKG, 2000]
Juli 1969
Nov.197O
Febr.1971
Juii 1971
Jan. 7973
Apollo 11
Luna 77
Apollo 14
Apollo 15
Luna 21
100 buah reflektor
Reflektor Prancis; tertutup debu
(tidak bisa digunakan lagi)
100 buah reflektor
300 buah reflektor
Reflektor Prancis
relro-refleklor (Apollo I 4) retro-reflektor (Luna 2 1 )
Gambar 6. l5 Contoh retro_reflektor di Bulan IBKG, 2OOOI ro-mR=p (6.71](https://image.slidesharecdn.com/1520geodesisatelit-160412154021/85/geodesi-satelit-survey-76-320.jpg)
![l4'2 Or,orlc.sr.Sr.rleli!
dimana:
ro = koordinat teleskop dalam sistem barisentris,
D" = koordinat reflektor dalam sistem barisentris,
I p | = jarak antara teleskop dengan reflektor.
Perlu dicatat di sini'(lihat Gambar 6.18) bahwa koord.inat
teleskop LLR dalarn sistem crs (rr) berbeda dengan sistem
barisentris (ro), karena adanya rotasi bumi, p".g"r.f^, kutub,
presesi dan nutasi. Disamping itu koordinat reflektor di Bulan
dalam sistem barisentris (m*) harus dikoreksi dengan mem-
perhitungkan pergerakan Bulan, seperti librasi.
sedangkan ukuran jarak dari Bumi ke Bulan akan dipengaruhi
oleh fenomena:
. pasang surut,
' aberasi (posisi relatif teleskop & reflektor berubah serama
sinyal bergerak),
. efek-efek relativitas, serta
. pergerakan lempeng.
Kesemua fenomena tersebut harus diperhitungkan daram
pengkoreksian data ukuran jarak sistem LLR.
.Srsllnt ,S/,/r' rlttrr l,l,l" l,l.t
yang lebih baik dari lo-to (0,1 ppb). Ini adalah tingkat kelt:litiirrr
relatif yang sangat tinggi.
6.6 APLIKASI LLR
Pada prinsipnya stasiun-stasiun pengamat LLR menetapkan ke-
rangka referensi di Bumi, dan retro-reflektor laser menetapkan
kerangka referensi di Bulan. Dengan menganalisa data ukuran ja-
rak dari Bumi ke Bulan, maka akan dapat ditentukan parameter-
parameter rotasi Bumi, dinamika sistem Bumi-Bulan, serta para-
meter relativitas. Perlu dicatat di sini bahwa menurut lCarter &
Roberison, 1985], karena koordinat kutub mempunyai korelasi yang
kuat dengan kesalahan pada ephemeris Bulan dan juga variasi dari
UTl, data LLR kurang sesuai untuk penentuan pergerakan kutub
Qtolar motionl dibandingkan data ukuran jarak ke satelit.
Secara umum tingkat ketelitian dari beberapa parameter yang
dapat ditentukan dengan metode LLR ditunjukkan pada Tabel 6.7
berikut.
Tabel 6.7 Tingkat ketelitian dari beberapa parameter yang
Dari beberapa hasil yang telah dicapai, perlu dicatat bahwa dari
analisa sekitar 15 tahun data LLR telah ditentukan nilai koefisien
gravitasi geosentrik GM, yaitu sebesar (Williams et al., 1987):
Gambar 6.18 Geometri pengamatan LLR [Seeber, 1993]
Perlu dicatat di sini bahwa ketelitian data ukuran jarak LLR
meningkat dari tahun ke tahun, yaitu sekitar 2,s m di tairun rgro,
meningkat ke sekitar lo-2o cm sejak rgz2,10 cm atau lebih baik
sejak 1975, dan sekitar 3 cm di tahun L993 fLambeck, rggg; seeber,
1993]. Kalau kita meli{rat japak Bumi ke Bulanyang sekitar 3g0.ooo
km, maka ketelitian jarak 3 cm ini setara dengan ketelitian relatif
ditentukan oleh LLR [FGg 1998]
No. Parameter Ketelitian
1. Koordinat stasiun pengamat
Kecepatan stasiun pengamat
3-5cm
O,4 - 1,2 cmf tahwn
2. Rotasi Bumi
Orientasi Sumbu Rotasi
Presesi
Nutasi
0,05 - 1 ms
0,5 - 10 mas
0,3 mas/tahun
0,9 - 3 mas
J. Koord nat reflektor 0,5-10m
4. Posisi Bulan
Kecepatan Bulan
GM, Bumi maupun Bulan
1O-5Ocm
0,5 cm/s
0,004 km3/s2
5. Rotasi Bulan 5"
6. Medan gaya berat Bulan 10-8 - 10 6
7 Parameter elastisitas
Parameter disipasi (dissip ationl
0,004
10s
B Percepatan sekular Bulan
karena friksi pasut dari Bumi
0,08"/abad2](https://image.slidesharecdn.com/1520geodesisatelit-160412154021/85/geodesi-satelit-survey-77-320.jpg)
![l,7rl (irrrr,lr,.sr Saft,/rl
GM = (398600,443 t 0,006) km3/sec2
Disamping itu dari sekitar 12 tahun data LLR juga telah ditentu-
kan nilai koefisien gravitasi untuk Bulan GM-, yaitu sebesar fFerrai
et al., 19821:
GM_ = (4902,7993 t 0,0029) km3/sec2 (6.e)
Menarik juga dicatat bahwa fenomena pasut laut di Bumi mem_
pengaruhi secara langsung orbit Bulan. Dari analisa data LLR di-
tunjukkan bahwa Bulan menjauh dari Bumi d.engan kecepatan se-
kitar 3,8 cm/tahun.
Secara umum beberapa pencapaian yang penting dalam aplika-
si teknologi LLR diberikan pada Tabel 6.8 berikut.
Bab 7
SISTEM VLBI
Teknik YLBI (Very Long Baseline Interferometryl pertama kali
dikembangkan dalam bidang astronomi radio dengan obyektif untuk
mempelajari secara rinci struktur sumber-sumber gelombang ra-
dio di luar angkasa (kuasar) dengan resolusi ketelitian angular yang
tinggi.
Dalam bidang geodesi satelit, teknik VLBI dapat dipandang se-
bagai teknik penentuan posisi relatif dengan menggunakan data
fa'se dari gelombang radio yang dipancarkan oleh kuasar, yaitu
benda langit pemancar gelombang radio alamiah. Dalam geodesi
satelit, VLBI adalah teknik penentuan posisi relatif yang paling
teliti untuk baseline fiarak antar titik)yang relatif panjang (sampai
beberapa ribu kilometer).
Da1am bidang geodesi, sistem VLBI terutama dimanfaatkan
untuk aplikasi geodetik berskala global dan menuntut ketelitian
yang relatif tinggi, seperti:
. Realisasi kerangka referensi koordinat,
. Penentuan parameter-parameter orientasi Bumi, dan
. Studi Geodinamika.
7.I PRINSIP DASAR VLBI
Prinsip dasar dari sistem VLBI dapat diilustrasikan pada Gam-
bar 7.1. Dalam hal ini dua sistem VLBI yang terpisah dengan jarak
tertentu (biasanya beberapa ribu km) mengamati suatu kuasaryang
sama. Data-data yang diamati oleh kedua sistem ini selanjutnya
dikorelasikan. Dari proses korelasi ini selanjutnya akan diperoleh
data pengamatan berupa perbedaan waktu tempuh sinyal'dari
kuasar ke kedua stasiun (group delagl, perbedaan fase dari kedua
sinyal Qthase delagl, serta laju dari kedua delag tersebut (delag
rate).
Untuk pengukuran parameter-parameter yang terkait dengan
waktu dan frekuensi tersebut, stasiun pengamatan VLBI umum-
nya menggunakan osilator fiaml hg drogen maser yang mempunyai
stabilitas pada level 1O-1a, dan data-data mentah umumnya dire-
kam secara digital dengan laju sampai 1 Gbit/det lMa, 1999).
Dari data-data di atas, dengan mengetahui vektor koordinat dari
kuasar S, maka vektor baseline B, yang merupakan vektor koordi-
(6 8)
Tabel6.8 Pencapaian teknologi LLR [CDDIS, 2OO1]
t970 - 7974 LLR adalah kontributor dominan untuk UT1.
Sistem referensi Seleocentic ditentukan.
Orbit Bulan ditentukan sampai ketelitian 1 m.
t975 - t979 . LLR meningkatkan kualitas GM Bumi.
. LLR menguji prinsip Strong Equiualence dari teori
relativitas.
. Pengukuran pertama dari percepatan (tidal) Bulan.
. Penemuan disipasi dan librasi bebas dari Bulan.
1980 - 1984 . BIH bergantung pada SLR, LLR, dan VLBI untuk pe-
mantauan kutub dan orientasi Bumi.
. Momentum sudut atmosfer global dikorelasikan de-
ngan LOD yang ditentukan oleh LLR.
. Penentuan ephemeris Bulan berketelitian l0 cm.
. Dinamika titik semi dan kemiringan (obliquitgl
ekliptika ditentukan dengan lebih baik.
. Elastisitas Bulan dideteksi.
1985 - 1989 . Presesi geodetik sesuai dengan relativitas pada ting-
kat 2o/"
. Koreksi untuk presesi dan nutasi ditentukan oleh LLR.
. Percepatan (tidal) Bulan ditentukan sampai keteliti-
an 0,5 arcsec/abad.
. Penentuan ephemeris Bulan berketelitian 3 cm.
. Orientasi ephemeris ditentukan sampai milliarcsec.
. LLR menentukan konstrain untuk laju perubahan
dari konstanta gravitasi G.
. Karakteristik bagian dalam Bulan diinvestigasi de-
ngan LLR.
A
145](https://image.slidesharecdn.com/1520geodesisatelit-160412154021/85/geodesi-satelit-survey-78-320.jpg)
![I 4(t ( i( 1)(,/r'st ,S(rl(,/lt
nat relatif antara kedua stasiun,
tat di sini bahwa seandainya
c.Atu(t) : B .-s(t)
akan dapat diestimasi. perlu <.lica_
vektor koordinat dari kuasar S
(7.r)
DATA o Group delay (data utama)
'ENGAMATAN
. phase detay
o Delay rate
Gambar 7.1 Prinsip dasar dari VLBI
tidak diketahui, maka ia dapat drestimasi bersama-sama dengan
vektor baseline B. Seandainya digunakan data pengamatan waktu
tunda (group delag) maka p.r"arrru.a., berikut alpal digunakan:
Stslt:rtt Vl.l ll l,l'/
Semua variabel kesalahan dan bias di atas, kecuali efek relativitas
At..,, dalam perspektif VLBI geodetik adalah variabel pengganggu
(nuisance uaiables) terhadap delay geometrik. Meskipun nilainya
relatif kecil, variabel-variabel tersebut harus diperhitungkan dan
dieliminasi dengan beberapa cara atau metode seperti berikut ICan-
non, 1999):
1. perhitungan langsung dari parameter-parameter fisika (untuk
At."J,
2. kalibrasi langsung (untuk At,,"J,
3. estimasi dengan pemodelan, dibantu dengan parameter-
parameter lokal (untuk At..oo dan At.,""u), dan
4. reduksi dengan data pada dua frekuensi (untuk At,o.o.).
Dalam sistem koordinat referensi CTS, persamaan (7.1) dapat
dijabarkan dalam persamaan berikut [Seeber, 1993]:
B.s(t) :b,
dimana:
(bx,by,bz)
(o,",5")
h :GST-o
.cos 6.cos h + b.cos 6.sin h + b.sin 5ssysszs (7.31
= komponen vektor baseline B,
= spheical equatorial co ordinates (asensiorekta,
deklinasi] dari sumber gelombang radio
(kuasar)
: sudut waktu (terhadap Greenwich) dari sum-
ber gelombang radio (kuasar).
- Data delay geometrik.(At*) dapat ditentukan dari group delay
hasil. pengamatan (At.o") denfia.r r.r".r"..pkan beberapa"koreksi se-
bagai berikut [Cannoi,- I999j:
Atot.: At* * At",o"u * At,.., * At,.o, * At,o.o" * At.., * .... (7.2)
dimana i Aton" = delay hasil pengamatan
At* = delay geometrik
At"ro"r. = bias delay karena tidak sinkronnya jam
At,.", = bias delay dalam instrumen
At,.oo = bias delay karena refraksi troposfer
At,o.o" = bias delay karena refraksi ionosfer
At."r = bias delay efek relativitas
Dari persam aan (7 . 1 ) dan (7. 3) akan diperoleh p ersamaan peng-
dmcttan berikut untuk data group delag, yaitu:
c.At(t) = b.cosS.cosh + b.cosS.sinh + b.sin6c. , x s s y s s z s
(7.41
Pada persamaan pengamatan di atas, menurut Seeber (1993)
parameter yang umum diestimasi adalah (bx,by,bz) dan (cr",6,).
Perlu dicatat di sini bahwa pada persamaan (7.41 di atas, phase
delag juga dapat digunakan ketimbang group delag. Hanya dalam
hal ini parameter yang diestimasi harus ditambah dengan para-
meter ambiguitas fase dari sinyal. Dalam hal ini seandainya freku-
ensi sinyal yang diterima adalah fo, maka hubungan antara kedua
data pengamatan delay dapat dituliskan secara umum sebagai:
A0.0.+Nr=2n.L.At.o" (7.s)
dimana A$"0" adalah data pengamatan phase delay dan N, adalah
ambiguitas fase. Seandainya A$ adalah data phase delay yang telah
dikoreksikan sesuai dengan persamaan 17.2) di atas, makaperso;ztrrant
pengamatanundtk phase delag bisa dituliskan sebagai berikut:](https://image.slidesharecdn.com/1520geodesisatelit-160412154021/85/geodesi-satelit-survey-79-320.jpg)
![f(t) = (-{/c).8.s'(t)
dimana:
B . S'(t) = -ro.(b,.cos 5,.sin h" - b".cos 6,.cos h. )
Pada persamaan di atas ro adalah kecepatan rotasi Bumi.
l rlu (ir,orlr'st Srtlr:/tl
c.( A$ + N")/2n.{ = b*.cos 6".cos h. * br."o" 6".sin h" + b,.sin 6" '(7'6)
Seperti sudah disebutkan di atas, selain group delay dan phase
delay, data pengamatan lainnya dari VLBI adalah delay rate atau
fringe frequencA. Delay rate (f(t)) ini bisa dihitung dari group delay
(At) maupun phase delay (A$), seperti yang ditunjukkan oleh persa-
maan berikut:
f(t) = f.. d(At)/dt = [d(A$)/dtl I 2n 17.71
Secara umum untuk delag rate, persamaan (7.1) dapat dituliskan
sebagai:
.Sr.sl3rrr V/./l/ l,ltl
Distribusi dari stasiun-stasiun VLBI tersebut d'i seluruh duniit
ditunjukkan pad'a C"*t"t 7'3 berikut' Dari Gambar ini terlihat
bahwa umumnya
"tl"l"rr*t"siun
VLBI berlokasi di USA dan Eropa'
ai""*pi"g 3uga Jepang, Australia' dan Cina'
Secara fisik, yang p'fittg menonjol terlihat pada suatu stasiun
VLBI adalah ukurariantenanya yang relatif besar' Antena yang re-
latif besar ini diperlukan untuk dapat mendeteksi sinyal yang da-
tang dari kuasar v#s;;J"ya situ laurr
dari Bumi' Gambar 7 '4
menunjukkan contoli beberapa stasiun VLBI yang saat ini berope-
rasi.
(7.8)
(7.e)
7.2 SISTEM VLBI
Pada saat ini ada sekitar 4O stasiun VLBI yang beroperasi di
seluruh dunia. Sekitar 5 stasiun dioperasikan oleh NASA dan sele-
bihnya diopere'-sikan oleh organisasi lainnya, bekeda sama dengan
NASA [/yS, 2000]. Perlu ditekankan di sini bahwa dalam
pengembangan sistem VLBI, NASA memang punya peran yang sa-
ngat besar sejak sistem ini dikembangkan di awal 1970-an. Per-
kembangan jumlah stasiun VLBI di dunia sejak 197o-an diberikan
pada Gambar 7 .2 berikut:
1980 1985 Tahun 1990 1995
40
)q30
6
a
Szo
10
Gambar 7.3 Distribusi stasiun-stasiun VLBI [fys' 20001
Gambar 7.2 Perkembangan.jumlah stasiull VLBI UyS, 20OOl
setiap stasiun VLBI umumnya dilengkapi dengan penerima (re-
ceiuer),jam (osilat.;i;;, seria perekam data (recorder)' Karena
sinyal dari quasar;;;;;" "u'ttglt
lemah' yaitu sekitar 1 Jansky
(1 Jy = 19'u V/*';;if,-#"rt" yllt"1 mendeteksinya diperlukan
teleskop (antena) .u.alo'att'gan diameter yang besar' biasanya da-
Iam orde beberapa puluh tt'"t"t [Lambeck' 1988]'](https://image.slidesharecdn.com/1520geodesisatelit-160412154021/85/geodesi-satelit-survey-80-320.jpg)
![I 5)O (irr;r.lc.si Satclil
Sistem VLBI umumnya beroperasi pada dua pita
ensi, yaitu X-bond (panjang gelombang sekitar 4 crn,
kitar 8 GHz) dan S-band (panjang gelombang sekitar
ensi sekitar 2 GHz).
ijr:;lt'rrt Vl,lll llrl
Reference Framel. Metode VLBI telah berkontribusi sejak awal irl<li
vitas ITRF pada tahun 1988lAltamimi,2OOOI'
Dalam pendefinisian kerangka referensi ITRF ini ketelitian tipikal
darikoordinatsertakecepatanstasiunyangdiamatidenganVLBI
diberikan pada Tabel 7.1, berikut kinerja dari metode-metode lain-
nya, SLR, GPS, dan DORIS.
(bandl freku-
frekuensi se-
15 cm, freku-
a
d
;o
d
i4
C)
o
+J
q)
a
H
o
-5
-10
-15
15,3 GHz 8,4 GHz
-5 5 0 .-5 5 0 -5
Offset Right Ascension (mas)
I.-alrbanks, Alaska Kauai, Hawaii
Gambar 7.4 Contoh stasiun VLBI
Seperti yang sudah disebutkan, sebelumnya, teknik VLBI meng-
amati gelombang radio yang dipancarkan oleh kuasar. Karena le-
taknya yang sangat jauh dari Bumi, perubahan posisi sudutnya
terhadap Bumi relatif sangat kecil. Saat ini ada sekitar 6O0 kuasar
yang digunakan oleh teknik VLBI. Meskipun kuasar dapat sangat
masif (compact), kuasar mempunyai struktur kecerahan (bightness
stntcture) yang relatif kompleks, dan struktur tersebut berubah
dengan waktu dan frekuensi emisinya, seperti yang diilustrasikan
pada Gambar 7.5 berikut.
7.3 APLIKASI VLBI
Sejak pengembangannya di awal l97O-an, VLBI telah banyak
berkontribusi dalam berbagai bidang aplikasi geodesi, seperti reali-
sasi kerangka referensi (selestial maupun terestrial) koordinat, pe-
nentuan parameter-parameter orientasi Bumi, serta studi geodina-
mika.
Dalam pendefinisian kerangka referensi koordinat, VLBI adalah
salah satu metode, disamping SLR, LLR, GPS, dan DORIS, yang
digundkan dalam realisasi kerangka rrRF (International rerre stria.r
Gambar 7.5 Vartasi struktur <lari sumber radio kuasar 3C-84 terhadap frekuen-
.siemisilWalker,2OOO);tuaktupengannotan:Oktoberg5;konturmulaidenganS'
10, 14, 2O mJy/beani c)ai setanjutnyanaik denganfaktor^12'
Teknik vLBI juga berkontribusi besar dalam realisasi kerangka
ICRF (/nfern ational cblestial Reference Frame serta pengikatannya
dengan kerangka ITRF [Ma, ]9991. Dalam hal ini teknik VLBI digu-
nakan untuk menentukan koordinat dari sekitar 600 kuasar yang
mendefinisikan ICRF.
22,2 GHz 5,0 GHZ
Fairbanks, Alaska
Tabel 7.1 Ketelitian tipikal lAltamimi,2O00l
Teknik Posisi - 3D
S/RMS (mm)
Kecepatan
WRMS (mm/tahun)
VLBI
SLR
GPS
DORIS
10
t4
10
34
2
3
J
9
WRMS = uetghte.d r,ms (root mean sQuarel](https://image.slidesharecdn.com/1520geodesisatelit-160412154021/85/geodesi-satelit-survey-81-320.jpg)
![I l r.l ( ilorlr'sr .Sutr,/il
'l'irlrt:l 7'2 'r'irgl<at keteritia, siia1. ini clari vLBI frlernrtg,2ooo]
-300
-200
- 100
o
100
200
300
. Berkaitan dengan penentuan UTl, perlu dicatat juga bahwa VLBIjuga dapat mengamati variasi aari urt yang reratif cepat (orde be-
I:t"p" jam) seperti yang diilustrasikan pada Gambar 7.9 berikut.Tingkat resolusi temporal yang relatif tinggi ini akan sangat ber-manfaat untuk menganali"^ i..ro-".ra rotasi Bumi secara rebihrinci.
(iarnbar 7.9 V:rriasi UT1 clriri VLBI [.VA.5-A_(]S1ICI 20001
Seperti disinggung di atas, VLBI juga dapat digunakan untukmengestimasi parameter pergerakan-kutub dan nutasi. Sarah satucontoh pergerakan kutub yang ditentukan dengan vieiJio..iL".,pada Gambar 7.10, dan clnto-n parameter nutasi diberikan padaGambar 7.1 1.
500 400
Gambar 7.10 f'er-geralizrn kutub clali VLBI
l)arlt'r & l?ol;r:r'1.son, .L841
79 81 83 8s 87 89 91 93 95
Tahun
G:rmbar 7.11 Nutasi dari VLBI [1/ASA-G'SI"C],20001
100
Pergerakan kutub 0, 1 mas 0,4 mas
Laju pergerakan kutub O, 15 mas/hari
0,01-0,03 ms
Nutasi 0,15 mas 0,2 mas,
periode < 10 hari
Xo"o](https://image.slidesharecdn.com/1520geodesisatelit-160412154021/85/geodesi-satelit-survey-83-320.jpg)
![Bab 8
SATELIT ALTIMETRI
Sistem satelit altimetri berkembang sejak tahun 1975, saat
diluncurkannya sistem satelit Geos-3. Pada saat ini secara umum
sistem satelit altimetri mempunyai tiga obyektif ilmiah jangka pan-
jang, yaitu:
. Mengamati sirkulasi lautan global,
. Memantau volume dari lempengan es kutub, dan
. Mengamati perubahan muka laut rata-rata (MSL) global.
Obyek-obyektif di atas dimaksudkan untuk memahami secara
lebih mendalam sistem iklim global serta peran yang dimainkan
oleh lautan di dalamnya.
Dalam konteks geodesi, obyektif terakhir dari misi satelit altimetri
tersebut adalah yang paling menjadi perhatian. Dengan kemampu-
annya untuk mengamati topografi dan dinamika dari permukaan
laut secara kontinyu, maka satelit altimetri tidak hanya bermanfa-
at untuk pemantauan perubahan MSL global, tetapi juga akan trer-
manfaat untuk beberapa aplikasi geodetik dan oseanografi lainnya
seperti [SRSRA, 2OOl; Seeber, 1993]:
. penentuan topografi permukaan laut (SST),
. penentuan topografi permukaan es,
. penentuan geoid di wilayah lautan,
. penentuan karakteristik arus dan eddies,
. penentuan tinggi (signifikan) dan panjang (dominan)
gelombang,
. studi pasang surut di lepas pantai,
. penentuan kecepatan angin di atas permukaan laut,
. penentuan batas wilayah laut dan es,
. studi fenomena El Nino, dan
. unifikasi datum tinggi antar pulau.
8.1 PRINSIP DASAR SATELIT ALTIMETRI
Satelit altimetri diperlengkapi dengan pemancar pulsa radar
(transmiter, penerima pulsa radar yang sensitif (receiuer), serta jam
berakurasi tinggi. Pada sistem ini, altimeter radar yang dibawa oleh
satelit memancarkan pulsa-pulsa gelombang elektromagnetik (ra-
dar) ke permukaan laut. Pulsa-pulsa tersebut dipantulkan balik
oleh permukaan laut dan diterima kembali oleh satelit, seperti yang
diilustrasikan pada Gambar 8.1.
A
157](https://image.slidesharecdn.com/1520geodesisatelit-160412154021/85/geodesi-satelit-survey-84-320.jpg)
![I 1 rlJ ( ;r 1)r/r...it .(rl(,/rl
lnformasi utama yang
ingin ditentukan dengan sa-
telit altimetri adalah topografi
dari muka laut. Hal ini dila-
kukan dengan mengukur ke-
tinggian satelit di atas permu-
kaan laut (a) dengan meng-
gunakan waktu tempuh (Dt)
dari pulsa radar yang dikirim-
kan ke permukaan laut dan
dipan-tulkan balik ke satelit
(lihat Gambar 8.1), sebagai
berikut:
a= c . Atl2 (8.1)
Set<'lit Alluncll' I l;()
dimana :
h = tinggi eiiipsoid dari satelit altimeter (dihitung dari
informasi orbit),
N = undulasi geoid,
H = sea surface topographg (SST),
AH : efek pasut instantaneous,
a
d
= hasil ukuran altimeter, dan
= kesalahan orbit.
permukaan laut
Gaurbar 8. 1. prinsip Satelit Altimetri
Perlu dicatat bahwa persamaan (8.2)
dasi semua kesalahan dan bias Yang
amatan satelit.
di atas belum mengakomo-
mempengaruhi data peng-
Orbit yang
dilaporkan
Orbit yang
sebenarnya
Muka.laut
sesaat
Muka laul
rata-rata
Geoid
Ellipsoid
Garnbar' 8.2 Geornetri Pengamatan Satelit Altimctri ISeeber, 1993]
Secara umum kesalahan dan bias yang mempengaruhi data peng-
amatan satelit altimetri adalah:
. kesalahan dan bias yang terkait sensor:
- kesalahan waktu altimeter
- kesalahan kalibrasi altimeter
- kesalahan pengarahan (pointingl altimeter
- noise dari altimeter
Perlu dicatat bahwa untuk mengeliminasi efek dari gelombang
serta gerakan muka laut berfrekuensi tinggi lainnya,;ait< ukuran
adalahjarak rata-rata dalam daerah footpint.
Dari data rekaman waktu tempuh sinyal, serta ampritudo dan
bentuk muka sinyal setelah dipanlukan oreh permukaan laut, be-
berapa karakteristik_ muka laut dapat diestimasi,
".p..ii yang di-
berikan pada Tabel 8.1.
Tabel 8.1 Informasi produk satelit Altimetri;
[Seeber, 1993; SRSRA, 200 lj.
4.2 GEOMETRI PENGAMATAN SATELIT ALTIMETRI
. Geometri pengamatan saterit artimetri di,ustrasikan pada Gam-
bar 8.2, dan direpresentasikan secara matematis sebagai berikut:
h=N+H+aH+a+d @.2)
Dari data waktu tempuh sinyal Dari data bentuk dan struktur
muka gelombang pantul
. Posisi uertikal permukaan laut
. Topografi muka laut (SST)
. Undulasi Geoid
. Topografi es
. Lokasi & kecepatan arus laut
. Tinggi gelombang
. Panjang gelombang dominan
. Informasi termoklin
. Kemiringanlapisan es
Dari data amp[tuuo geromo;;E;;;tul
K e cep atan ang in p e rmux"" i effi
Batas laut/es](https://image.slidesharecdn.com/1520geodesisatelit-160412154021/85/geodesi-satelit-survey-85-320.jpg)
![I ( lO ( ir,rttlt,:;t iittl<'ltl
. kesalahan dan bias yang terkait propagasi sinyal:
- refraksi ionosfer
- refraksi troposfer (komponen kering dan basah)
. kesalahan dan bias yang terkait satelit:
- kesalahan orbit
- kesalahan sistem koordinat dari stasiun-stasiun kontrol
. kesalahan dan bias yang terkait dinamika muka laut:
- bias elektromagnetik, yaitu perbedaan antara muka laut rata-
rata dengan muka pantulan rata-rata (mean scatteing sur-
face); yang disebabkan oleh tingkat kekasaran (rough-ness)
muka laut yang tidak homogen secara spasial.
- skeLuness bias, yaitu beda tinggi antara muka pantulan rata-
rata dengan muka pantulan median (median scattering sur-
facel yang diukur oleh penjejak di satelit; yang disebabkan
oleh distribusi tinggi muka laut yang tidak normal (non-
gaussian.
Pada persamaan (8.2) di atas, hasil ukuran altimeter a yang di-
gunakan adalah hasil ukuran yang sudah dikoreksi dengAn kesa-
lahan-kesalahan akibat refraksi ionosfer dan troposfer, serta kesa-
lahan dan bias yang terkait dengan sensor altimeter serta dina-
mika muka laut.
Perlu dicatat di sini bahwa dengan perkembangan teknologi, re-
solusi data ukuran jarak aitimeter semakin baik, dari sekitar 1 m
pada tahun 1973 sampai sekitar l-2 cm pada saat ini, seperti yang
diilustrasikan pada Gambar 8.3 berikut. Meskipun begitu, tingkat
ketelitian akhir dari jarak ukuran akan sangat bergantung pada
tingkat kesuksesan pereduksian dan pengeliminasian dari kesa-
Iahan dan bias yang mengkontaminasi data ukuran.
t
Pelkembangan
Resolusi Ukulan
Jarak Altimetcr (cm)
Sky'lab (iqrs-J (icosat IIRS-l T()P[X IIRS-2 (icosirt Ir(J
Srilr,lil Allrtr''l'r l{r I
Dari Gamb at 8.2 dan persamaan (8'2) sebelumnya terlihat lritltwrr
tingkat kualitas informasi muka laut yang ditentukan oleh sltitltt
sisle* satelit altimetri akan sangat bergantung pada tingkat kete-
litian penentuan orbitnya terutama dalam arah radial, disamping
juga blrgantung pada penentuan kesalahan dan bias lainnya' Oleh
sebab itu, penentuan orbit satelit altimetri secara teliti adalah suatu
faktor yan! signifikan untuk misi satelit altimetri berketelitian tinggi'
Sebagai.ot tofr, satelitTOPEX/ Poseidon mempunyai tingkat kesa-
lahan orbit dalam arah radial sekitar 3,5 cm. Tingkat ketelitian
orbit yang cukup tinggi ini d.icapai dengan melakukan penjejakan
satelii dengan sistem-sistem SLR, DORIS, GPS, TDRSS (Tracking
and. Data Retay satettite sgsfems) serta memanfaatkan data satelit
altimeter sendiri.
8.3 MISI.MISI SATELIT ALTIMETRI
Sejak peluncuran Skylab pada tahun 1973, sampai saat ini su-
dah aaa bebeberapa misi satelit altimetri yang diluncurkan dengan
obyektifnya masing-masing, seperti yang ditunjukkan pada Tabel
8.2 berikut.
100
40
Tabel 8.2 Misi-misi Satelit Altimetri ISRSRA, 2001]
Misi Tahun/
lnstansi
Obyektif
Skylab L973-74
NASA
Pembuktian untuk pertama kali konsep
pengukuran radar altimeter dari satelit'
GEOS-3 t975-78
NASA
Mengumprtlkan data untuk menin gkat-
kan kualitas parameter geodetik dan geo-
fisik yang diperoleh sebelumnJa.
Seasat r978
NASA
Didesain untuk memberikan data ukuran
dari tinggi gelombang, topografi lautan g1o-
bal, dan geoid lautan.
Geosaf 1985-89
US Navy
Satetit osEa.rografik militer didesain untuk
pemetaan presisi dan detail dari geoid di
wilayah lautan.
}]RS-I 1991-kini
ESA
Didesain untuk analisa muka laut rata-
rata dan geoid lautan.
TOPEX/
Poseidon
1992-kint
NASA
CNES
Eksperimen topografi lautan untuk meng-
ukur dan memetakan muka laut pada dua
frekuensi, 5.3 dan 13.6 GHz, untuk me-
ningkatkan pengetahuan kita tentang sir-
kulasi lautan berskala luas'
ERS-2 1995-kini
ESA
Didesain untuk analisa muka laut rata-
rata dan geoid lautan.
(iatlrbar 8.3 Perkernbiutgan tesolusi ul<uratr jalah tltimt-tr,'r](https://image.slidesharecdn.com/1520geodesisatelit-160412154021/85/geodesi-satelit-survey-86-320.jpg)
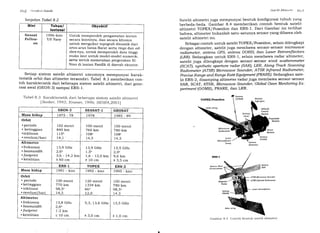
![l(),,| (;r1)./(,sr,ilI(,1t1
4.4 APLIKASI SATELIT ALTIMETRI
seperti sudah disebutkan seberumnya, aplikasi satelit artimetridalam bidang geodesi antara lain telkait dengan penentuan topo-grafi permukaan laut (SST), p".r..tr"r, topografi lapisan es, pe_nentuan karakteristik
9T.po1" u..r", pasut, dan gelombang, pe_nentuan kecepatan angin aiLtas p".*rf.u"r, laut, penentuan geoiddi wilayah lautan, penentuan batas laut dengan lapisan es, sertaunifikasi datum tinggi di wilayah k.pulauar.
Dalam hal ini perlu dicatat bahwa vang dimaksud dengan SST( s e a Su rfa c e rop o s r a p hs) ad at ah d ; ri J ;;;',:;:*J,t rm u k a _
an geoid, yaitu perbedaan dalam tinggi ellipsoid
"rt.;;;;ukaanlaut dengan permukaan geoid,
""p??i
yang iliilu"t*I*r, p.a"Gambar 8.5. SST sendiri a.pui dtdiatas dua komponen, yaitukomponen statik (qtasi-statiz""rg) Ji., ai.r"-ik. Komponen dina-mik terutama disebabkan oleh f#o_"rr" gelombang, pasang su_rut' dan variasi tekanan udara. Sedangkan komponen sST statikterutama disebabkan oleh arus laut, efek meieoroifiI",
""rt"inhomogenitas pada distribusi
""ri"it"" dan temperatur air laut.
Gambar 8.5 Sea Surface Topographg (SST)
Pada pengamatan dengan satelit altimetri yang teramati padasaat pengukuran adalah^sST sesaat, sedangkair i&; -J; diketa-hui umumnya adalah SST statik.?"..rU., g.6 menunjukkan SST(statikf globar vansld.igltlmasi oari Li tahun data GEos-3 ditam-bah seluruh data SEASAT Vu"g
"au.
'-
Model geoid yang digunakan daram hal ini adalah model geoidyang digunakan untuk orbit satelit snasar. Gambar ini menun-jukkan bahwa satelit altimetri ;;;;;"y"i kemampuan yang sa_ngat baik dalam menentukan rrariasi spasiat SST
"J;;
jobat.
iltlt'ltl Alltrrrt'lrr I (rlr
+75
90 180 27O Bujur
Gambar 8.6 Representasi global dari SST lCheneg et al., 19841
Satu contoh lainnya dari SST (statik), yang kadang dinamakan
juga DOT (Dynamic Oceqn Topographg), global yang diestimasi de-
ngan satelit altimetri diberikan pada Gambar 8.7. Variasi spasial
SST ini dihitung menggunakan satu tahun data (1996) dari satelit
ERS-1 dan ERS-2. SST ini merupakan nilai rata-rata dari 12 nilai
SST bulanan. Model Geoid yang digunakan dalam hal ini adalah
ERS-I Preliminary Maine Geoid. Kalau dibandingkan dengan SST
global yang ditunjukkan pada Gambar 8.6, terlihat bahwa variasi
amplitudonya relatif sama yaitu sekitar -1,5 m sampai 1,0 m. Da-
lam hal ini hanya variasi maksima dan minima yang relatif tidak
sama.
eso/esoc ERS Meon Dynomic Oceon Topoqrophy - 1996
o 50 r 00 I 50 200 250 300 350
-ro -1b -1@ -Eo -& -40 -2O O 20 € @
'0
".ro."rf;0
Cizrmbar B 7 Representasi global dari SST tahunan untuk 1996 [ESOC, 2000]
Satelit altimetri juga dapat dimanfaatkan untuk mempelajari
variasi SST terhadap waktu dalam suatu skala spasial regional.
5
(U
.s
J
Permukaan](https://image.slidesharecdn.com/1520geodesisatelit-160412154021/85/geodesi-satelit-survey-88-320.jpg)
![I (l(r (;.1)(,1(,s, .S(rr(,,ltl
Hal ini ditunjukkan oleh hasil pada Gambar 8.8 yang diperoleh
dari dua lewatan satelit GEOS-3 pada jejak yang sama di Lautan
Atlantik sebelah Utara. Dari Gambar ini terlihat bahwa dalam se-
lang waktu sekitar 5 bulan, perubahan SST dapat mencapai 120
cm karena adanya perubahan pada gulfstream meander. Menarik
juga untuk disimak bahwa pada kawasan gunung api bawah laut
Muir, variasi temporal SST dalam selang waktu tersebut reratif sa-
ngat kecil dan dapat diabaikan.
+
+
i
,++
f
'+
20
10
F
o
-J(/)
U)
(U
(U
*il ;*i
:tttt ltl tlltnt ltt
Darisatelit GEOSAf
++
++b
*
{f
+
+
J+
+
0
-10
-20
1*+
+
,
+
Gambar 8.8 Variasi temporal clari SST lCheneg et al., I9g4l
satelit altimetri juga dapat digunakan untuk mempelajari vari-
asi dari I!//,SL (Mean Sea Leuet) terhadap waktu. Gambar g.9 beri-
kut menunjukkan contoh variasi MSL yang diestimasi dari 14 bu-
lan data GE O SAT yan g j ej ak (g round. tr ack)- ny a berulang setiap tiga
hari. Gambar ini memperlihatkan bahwa resolusi variasi MSLyang
diperoleh adalah lebih baik dari 1O cm.
Satelit altimetri juga dapat digunakan untuk menentukan vari-
asi spasial dari anomali gaya berat (grauitg anomalgl di wilayah
lautan. ,Gambar 8.10 berikut memperlihatkan contoh peta anomali
gaya beratyang disusun dari hasil pengolahan data satelit altimetri
GEosAT, ERS-1 and roPEX-Poseiilon. Dari Gambar ini memperli-
hatkan bahwa variasi spasial regional dengan resolusi sekitar 10
mgal dapat diperoleh secara relatif mudah dengan satelit altimetri.
Perlu ditekankan di sini bahwa variasi temporal anomaly gaya be-
rat ini juga tentunya akan dapat ditentukan dari satelit altimetri.
100 200 300 400 500 hari
Gambar 8.9 Variasi temporal MSL dari satelit altimetri
(Cheneg et al.' 1986
Gambar B.1O Variasi spasial anoma-li gaya berat dari
Satelit Altimetri [DEO-S, 2000]
Seperti sudah disebutkan sebelumnya kecepatan dan pola arus
laut juga dapat diestimasi dari clata satelit altimetri. Gambar 8.11
-.rlrr.lrt kan kecepatan clan pola arus (gulfstream) di pantai Ti-
mur Amerika Serikat pacla 7 Agustus 2000, yang diestimasi mcng-
gunakan data satelit trRS-2.
31,0oU 33
64,5o8
35 Lintang 37 39 41,0oU
56,4"8
_ 23 April 1977
---- 28 Sept. 1977
/, perubahan 120 cm __
- :z yang disebabkan oleh
O 100 2OO the gulfstream meander
lrl
km](https://image.slidesharecdn.com/1520geodesisatelit-160412154021/85/geodesi-satelit-survey-89-320.jpg)
![0.f 0..+ D.R 0.8 1
;
Gambar 8.11 Kecepatan dan pola arus dari Satelit Altirnetri IDEO$ 2000]
Tinggi gelombang signifikan (significant uaue heightl dan kecepatan
angin juga dapat diestimasi clari data satelit altimetri, seperti yang
ditunjukkan pada Gambar 8.12 dan 8.13 berikut.
iiiiii,r Hr+ i1'1irl finl
Gambar 8.12 Tinggi gelombang dari Satelit Altimetri IAVISO, 2OOO)
w4iir'rn$$itltwwiff+ .;,'rtilrw
Wind spr*ed {lrr rrnJ:;i
GambarB.l3KecepatanangindariSatelitAltimetri[Ayrsq2000]
Gambar 8.12 menunjukkan tinggi gelombang signifikan serta
variasi spasialnya
""..r.
global pada bulan Juli 1998' dan Gambar
8.13 menunjukkan kecep-atat' angin serta variasi spasialnya pada
periode waktu yu-ng
".-..
Datayang digunakan adalah-data satelit
iOefXTeoseidtn' kedua Gambar ini menunjukkan hubungan an-
tara kecepatan angin dan tinggi gelombang signifikan' Terlihat
bahwa semakin cepat kecepatan angln maka akan semakin tinggi
gelombang signifikan, dan sebaliknya'](https://image.slidesharecdn.com/1520geodesisatelit-160412154021/85/geodesi-satelit-survey-90-320.jpg)
![Bab 9
SISTEM SATELIT
NAVIGASI
Sampai saat ini pada prinsipnya sudah ada empat sistem satelit
navigasi yang pernah dikembangkan dan dimanfaatkan, yaitu sis-
tem TRANSIT (Doppler) dan GPS milik Amerika Serikat, dan
TSIKADA dan GLONASS milik Rusia lSeeber, 1993; Forssell, 199 1 ).
Sistem TRANSIT didesain pada tahun 1958, dan dinyatakan opera-
sional pada tahun 1964 (untuk pihak militer) dan 1967 (untuk pi-
hak sipil). Sistem TSIKADA adalah sistem Rusia yang mirip dengan
TRANSIT yang juga operasional sekitar pertengahan 1960-an. Pada
saat ini kedua sistem satelit ini praktis sudah tidak banyak digu-
nakan lagi, tergantikan oleh sistem-sistem GPS dan GLONASS.
Saat ini sistem TRANSIT dan TSIKADA sudah tidak operasional
lagi, digantikan oleh GPS dan GLONASS. Dari kedua sistem yang
operasional tersebut, GPS adalah sistem yang paling populer dan
paling banyak digunakan saat ini. Oleh sebab itu pada Bab ini pen-
jelasan tentang sistem satelit navigasi akan dikonsentrasikan pada
sistem GPS. Sistem GLONASS akan hanya disinggung sekilas di
akhir Bab. Penjelasan yang lebih rinci dan komprehensif tentang
sistem GPS diberikan di Abidin (200Q).
GPS adalah sistem radio navigasi dan penentuan posisi meng-
gunakan satelit. Nama formalnya adalah NAVSTAR GPS, kepen-
dekan dari NAVigcttion Satellite Timing and Ranging Global Position-
ing Sgstem. Sistem yang dapat digunakan oleh banyak orang seka-
Iigus dalam segala cuaca ini, didesain untuk memberikan posisi
dan kecepatan tiga dimensi yang teliti, dan juga informasi menge-
nai waktu, secara kontinyu di seluruh dunia [Abidin,200O]. Arsi-
tektur dari sistem GPS disetujui oleh Departemen Pertahanan
Amerika Serikat pada tahun 1973. Satelit yang pertama diluncur-
kan pada tahun 7978, dan secara resmi sistem GPS dinyatakan
operasional pada tahun 7994. Biaya pembangunan sistem GPS yang
pernah dilaporkan adalah sekitar 10 milyar US dollar, sementara
biaya operasi dan pemeliharaannya per tahun berkisar dari 250
sampai 5OO juta USD [Enge and Misra,1999]. Sejarah pembangun-
an serta karakteristik sistem GPS secara komprehensif dapat diba.
ca di lParkinson et. al., 1996).
Pada dasarnya GPS terdiri atas
men angkasa (space segment) yang
tiga segmen utama, yaitu seg-
terdiri dari satelit-satelit GPS,
t77](https://image.slidesharecdn.com/1520geodesisatelit-160412154021/85/geodesi-satelit-survey-91-320.jpg)
![l'i'.) ( it.,trlr...t iirtttltt
ri(:grne' sistem kontrol. (contror sastem Segment) yang tercliri daristasiun-stasiun pemonitor dan pE"gorrt.of
latetit, dan segmen pe_makai (user sesm""!!:y1..a1, J"?ipernakai GpS termasuk alat_alat penerima dan p".rgotut,
"irry.i-J"., data GpS. Ketiga segmenGPS ini digambarkan secara skematik pada Gambar 9. 1.
9.I SEGMEN SATELIT
Satelit GpS bisa dianalogikan sebagai stasiun radio di angkasa,yang diperlengkapi dengan .rrt".r"-"?tena untuk mengirim danmenerima sinyat_sinyil^qet?mbanC.
6inyat_sinyaf iri
".iar;utnyaditerima oleh receiver GpS di/deka?pJr_rt r.r, bumi, dan diguna_kan untuk menentuka" i"f*;;;i;;fii, kecepatan, maupun waktu.Selain itu satelit Gp! j."si Ji;;#;;pi dengan peratitan untukmengontrol'tingkah -l aku' (.attitu d e)"dari satelit, serta sensor_sen_sor untuk mendeteksi peledakan
";tli; dan lokasinya.
i lt',lr'ttr iirtlr'ltl Nrtt,t,lrr',r l'i I
9.1.1 Satelit Blok I
Satelit GPS Blok I adalah generasi satelit percobaan (lrrilirtl t'otr
cept Validation Satellites) , dan pertama kali diluncurkan pada t a r r ggrr I
22Februari 1978. Sejak saat itu sampai tahun 1985, ada i I salelil
Blok I yang diluncurkan, dan bentuk fisik dari satelit ini ditunjttl<-
kan pada Gambar 9.2. Meskipun satelit Blok I hanya dimaksudkar-r
sebagai satelit percobaan, tetapi sejak awal satelit-satelit Blok-l ini
sudah banyak digunakan oleh pihak militer maupun sipil dengarr
hasil yang baik.
Satelit GPS Blok I
"rtr:Ji'
Gambar 9.2 Satelit GPS Blok I
Saat ini satelit Blok I sudah tidak operasional lagi, clan sudah
digantikan dengan generasi operasional yang dinamakan Blok II
dan IIA. Status dan sejarah konstelasi dari satelit Blok I ini diberi-
kan pada Tabel 9. I berikut. Dari Tabel ini dapat diturunkan bahwa
masa operasional total dari satelit Blok I ini adalah sekitar 78,29
tahun, dengan masa operasional rata-rata per satelit sekitar' 7,8
tahun. Meskipun satelit Blok I, yang dibuat oleh Rockr'vell Interna-
tional ini, mernpunyai rencana masa hidup 3 tahun, tetapi pada
kenyataannya ada yang mencapai masa hidup lebih dari 10 tahun
(lihat Tabel 9.1). Sebagai pengganti dari satelit Blok I yang sudah
tidak berfungsi, diluncurkan satelit-satelit Blok II dan IIA yang le-
bih canggih dan lebih dapat diandalkan daripada satelit percobaan
tipe Blok I.
9.1.2 Satelit Blok II dan IIA
Satelit Blok II adalah satelit GPS operasional generasi pertama,
dan mempunyai nomor SVN (Space Vehicle Numbers) dari 13 sam-
pai 21. Satelit Blok II ini dibangun oleh Rockwell International clan
diluncurkan mulai Februari 1989 sampai Oktober 1990.
SATELIT
.21 +3531.1;1
. pr'riode or.bit : l2 ianr
. altirurle orbit: 20200 l(ln
PENGGLTNA
. Mengarnati sinyal GpS
. IJitr-rng posisi dan kecepatan
SISTEM KONTROL
. Sinkronisasi r,vaktu
. Predil<si orbit
. Injeksi dara
Monitor l<csehatan satelil
. Dapatkan inlbrrnasi
nrengenai waktu
1 9861
beberapa
Gambar 9. 1 Sistem penintuan posisi Global , GpS [Welts et al.,
Pada dasarnya satelit_satelit GpS dapat dibagi atasgenerasi yaitu [Kaplan, 1996]:
. BLOK I : Iyti.ti.al Concept Validation Sqteilites. BLOK II : Initial produitio,n'iaiettites
. BLOK IIA : (.Ipgrad,ed. proiu"ti* Satellites. BLOK IIR : Reptenish^""t iotl,tirt.". BLOK IIF : Follou_O".SuiJoin^ent,, satellites
Pada saat ini (Agus.tLrs 2OOO), ada Z satelit Blok II, 1g satelitBlok II A, clan 2 satgJlt etok liR,
".leUt-s.telit yang operasionaladalah satetit-satelit Blok II dJiiA*""](https://image.slidesharecdn.com/1520geodesisatelit-160412154021/85/geodesi-satelit-survey-92-320.jpg)
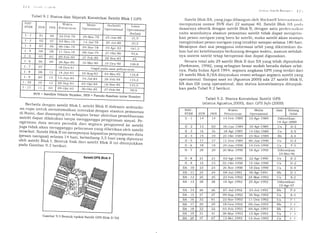
![l'/lt ( irr)(/('.sr ^Srrl(,/rl
lctrtlutan Tabel 9.2
NAV-
STAR SVN PRN
Waktu
Peluncuran
Mulai
Operasional
Jam Bidang
Orbit
TTA . 21 39 09 26-Jun- 1 993 20-Ju1- 1993 Cs A-1
IIA. 22 35 05 30-Agt- 1993 28-Sep- 1 993 US B-4
IIA 23 34 o4 26-Okt- 1 99s 22-Nov- 1 993 Rb D-4
iiA -24 36 o6 l0-Mar- 1994 28-Mar-7994 Cs c-1
IIA -25 )a
28-Mar- 1996 09-Apr- 1 996 Cs c:2
TIA - 26 40 10 16-Jul- 1 996 t s-Agt- 1 996 Cs E-3
TIA - 27 30 30 r2-Sep- 1996 01-okt- 1996 Cs B-2
IIA - 28 38 OB 06-Nov- 1 997 i 8-Des- 1 997 Rb A-5
IIR.1 42 17 -Jan-7997 Peluncuran gagal (neledak)
IIR-2 43 1J 23-Jul- 1997 3 1 -Jan- 1998 Rb F-5
IIR-3 46 1I 07 -okt-1999 Rb D-2
IIR.4 5l 20 I1-Mei-2O00 01-Jul-2000 Rb E-l
Cs = Cesium, Rb = Rubidium.
Sistarrt Salr:Iit Nttrtitlttsr l'/'/
Satelit GPS Blok IIR
Gambar-9.4 Bentuk tipikal Satelit GPS Blok-IIR
kontak d.engan segmen pengontrol di Bumi, seperti yang ditunjuk-
kan oleh data pada Tabel9.3 berikut.
Perbedaan lainnya antara satelit Blok IIR dengan satelit Blok IIA
dapat diringkaskan sebagai berikut:
. Berkaitan dengan Nauigation Pagload:
- tambahan penguatan terhadap radiasi.
- kemampuan melakukan pengukuran jarak antarsesama
sate'lit (cross link ranging).
- mikro-prosesor yang dapat di program ulang.
- duajam atom operasional pada setiap saat (hot backup'
. Berkaitan dengan Electricol Pouer Sysfems (EPS):
- Penggunan 3 baterai Ni CAD dan 2 baterai NiH.
Satelit Blok II/lIA didesain untuk memberikan perayanan se-
larna 7.3 tahun, dan setiap satelit mempunyai a jim atom: dua
Cesium (Cs) dan dua Rubidium (Rb); serta mempunyai kemampu-
an Selective Availability (sA) dan Anti Spoofing (AS). Satelit BlokII/
IIA ini diluncurkan dari cape caneveral Air Fo.c" Station dengan
menggunakan Delta II MLV (Medium LctunchVehicle).
9.1.3 Satelit Blok IIR
Satelit Blok IIR adalah generasi satelit GpS setelah satelit Blok
IIA yang dibangun oleh Ge'eral Electric, dan mempunyai nomor
SVN dari 41 sampai 62. Bentuk fisik dari satelit etok ttpini ditun-
jukkan pada Gambar 9.4 berikut. Saterit yang pertama rrari gene-
rasi Blok IIR ini telah diluncurkan pada tangg.i 17 Jr.r.,ari 1997,
tetapi hancur karena kegagalan dalam proses peluncurannya. Se_
dangkan satelit Blok IIR yang kedua tel;h dilu;curkan pada tang-
gal23 Juli 1997 dan dinyatakan operasional pada tanggal 31 Ja_
nuari 1998. satelit Blok IIR yang kiempat diluncurkariiada tang-
gal 11 Mei 2000 dan dinyataka' operasionar pada tanggal 1 Juri
2000.
Karakteristik yang spesifik clari satelit Blok IIR ini adarah ke-
mampuannya untuk melakukan navigasi yang sifatnya mandiri
(autonomous nauigation). Daram hal ini, satelit Blok IIR iapat men-
ciptakan pesan navigasinya sendiri tanpa pengiriman darl stasiun
pengontrol di Bumi. Dengan kemampuan ini sistem dapat menjaga
ketelitiannya secara baik meskipun cukup rama tidak merakukan
Tabel 9.3 Perbandingan Satelit GPS [Kaplan, 1996]'
Blok
Kemampuan
Autonomous
Navigation
Data Storage:
Ephemeris/
Clock (hari)
Pengelolaan
Momentum
Periode dari
Autonomous
Operation,
AO (hari)
URE di
akhir periode
AO
(m)
II
IIA
IIR
Tidak
Tidak
Ya
14
180
2to
OCS
Onboard
Onboord
t4
180
180
161,1
< 1 0000
74
OCS = Operational Control Segment, URE = User Range Error](https://image.slidesharecdn.com/1520geodesisatelit-160412154021/85/geodesi-satelit-survey-94-320.jpg)
![|'i li t ilor/r'r:r Srrlr,/rl
. Ilcrkaitan dengan Attihtde And Velocity Control Sgrstems (AVCS):
- Mekanisme akuisisi/pengarahan dari manual sampai
otomatis.
. Berkaitan dengan Sgstem Design'.
- Kapasitas bahan bakar yang lebih besar
- Adanya sistem pengelolaan tambahan pada prosesor satelit.
Satelit Blok IIR didesain untuk memberikan pelayanan selama
7,8 tahun, dan setiap satelit mempunyai 3 jam atom: satu Cesium
(Cs) dan dua Rubidium (Rb); serta mempunyai kemampuan Selec-
tiue Auqilabillly (SA) dan Anti Spoofing (ASI.
9.L.4 Satelit Blok IIF
Satelit Blok IIF adalah generasi satelit GPS yang direncanakan
akan menggantikan generasi satelit Blok IIR. Dalam hal ini Ang-
katan Udara AS merencanakan membeli sebanyak 33 buah satelit
Blok IIF. Rencananya satelit Blok IIF mulai akan diluncurkan mu-
lai tahun 2OOl, seperti yang diilustrasikan pada Gambar 9.5.
Garrbar 9.5 Rencana I(onstelasr Satelit GPS
9.1.5 Konfigurasi Orbit
Konstelasi standar dari satelit GPS terdiri dari 24 satelit yang
menempati 6 (enam) bidang orbit yang bentuknya sangat mend.e-
kati lingkaran, dengan eksentrisitas orbit umumnya lebih kecil dari
0,02, seperti yang diilustrasikan pada Gambar 9.6.
Ciambar 9'6 l(onfigurasi Orbit Satclit-satelit GPS
Keenam bidang orbit satelit GPS mempunyai :P":i sudut yang
sama antarsesam""v"' ft4"-ftipun begitu
"Ltitp
orbit ditempati oleh
4 satelit dengan interval antaranya yang tidak
""T.^'
seperti vang
Jt,""i"ir.""?"a" c^*u" 9'7 ' Jarakanlarsatelit diatur sedemiki-
an rupa untuk *"-uk"i*alkan probabilitas kenampakan setidak-
nya 4satelit V."g U"tgtt;etri'-baik dari setiap tempat di permuka-
an bumi pada setiaf 3""' ta"A"y and Lamoni' 1992; Green' 1989]'
*tS(s
!
(!
5ro
-
Bidang orbit A
Fl,l<uator 0u
320'
llighl As<:anvon ol
Isttnding Norlc
2800
2400
2000
(larnbal 9 7 Distribusi satelit GPS](https://image.slidesharecdn.com/1520geodesisatelit-160412154021/85/geodesi-satelit-survey-95-320.jpg)
![I FIO ( it'rttlt'::r Strltlil
orbit saterit Gps berinklinasi 55 derajat terhadap bidang ekuatorclengan ketinggian rata-rata dari plrmukaan bumi sekitar 20.2ookm' Saterit GpS bergerak aahm o?bitnya dengan kecepatan kira-kira 3'87 km/detik a"n -"-p""v"r periode 11 jam dan 58 menit(sekitar 12 jam)'.
!1nsan "a"iyi ii satelit vang mengangkasa ter-sebut' 4 sampai 10 satelit cps
"r.", seraru dapat -iamati padasetiap waktu dari manapun di permukaan bumi.
Setiap satelit Gps secara kontinyu memancarkan sinyar-sinyalgelombang pada.2 frekuensi L-b;;d yang dinamakan Ll and L2.sinyal L1 berfrekuensi tszs,+i iuz
^an
sinyal L2 berfrekuensi1227,60 MHz. Sinyal L1 memb u*,u 2 buah koie Uir". V.rS ai.._makan kode_p (p_cod.e, precise or iiuate"ra.j-J"" f.rI"_"ZO (C/A-code, ClearAccess or^C.oarse Acquisation), sedangkan sinyal L2 ha_nya membawa kode-c/A. perru dicatat bahwa pada saat ini kode-ptelah diubah menjadi kode_yyang
"t.rf.trrrrya dirahasiakan untukumum.
Dengan mengamati sinyal-sinyal dari saterit dalam jumrah danwaktu yang cukup' seseorang kemudian dapat -"-.o".".rya untukmendapatkan informasi meigenai fosisi, kecepatan, dan waktu,ataupun parameter_parameter turunannva.
9.2 SEGMEN SISTEM KONTROL
Segmen sistem kontror berfungsi mengontror dan memantauoperasional saterit dan memastikair bahwa'saterit u".irrgsi seba_gaimana mestinya. Fungsi i"i _""""r.up beberaf, ;;;" dan ke-wajiban yaitu antara lain:
fl Menjaga agar semua saterit rnasing-masing berada pada posisiorbitnya yang seharusnya lstaiion keeping). ini dilakukandengan;
- Mengamati semua scttelit secara terus_menerus.
y:tlr*diksi ephemeris satetit serta kctrakteistik d.ai jam
- secara peiod-ik memperbaharui nauigation mess..ge untuksetiap saterit (normativa sekati
".,nii,'ioiou'ffiI)run u*lebih sering).
" $:li:,au
status dan kesehatan dari semua sub_sistem (bagian)
E Memantau panel matahari satelit, level daya baterai, danpropellant level yang digunakan untuk manuver satelit.El Menentukan dan menjaga waktu sistem GpS.
Kelaik-gunaan saterit-saterit GpS tersebut dimonitor dan dikon-trol oleh segmen sistem kontrol v""g i.rairi dari beberapa stasiunpemonitor dan pengontrol yang i..".-U". di seluruh arrrll]vrit, ai
.Sr:;lr,ll| Srtlr,/ll Nttttttlrt,,r I ti I
pulau Ascension (Samudera Atlantik bagian selatan), Diego (iirrt'i:r
(Samudera Hindia), Kwajalein (Samudera Pasifik bagian r,rtar':r),
Hawaii, dan Colorado Springs. Disamping memonitor dan mengon-
trol kesehatan seluruh satelit beserta seluruh komponennya, seg-
men kontrol ini juga berfungsi menentukan orbit dari seluruh sa-
telit GPS yang merupakan informasi vital untuk penentuan posisi
dengan satelit.
Secara spesifik, segmen sistem kontrol terdiri dari Ground An-
tenna Sfatlons ( GAS), Monito r Stations (M S ), Prelaunch Comp atibilitg
Station (PCS), dan Master Control Station (MCS) lBagley and Lamons,
19921. GAS berlokasi di Ascension, Diego Garcia, dan Kwajalein.
Lima stasiun MS terdiri dari stasiun GCS ditambah stasiun di Colo-
rado Springs dan Hawaii. Stasiun PCS berlokasi di Cape Caneveral,
dan stasiun ini juga berfungsi sebagai backup dari GAS. Sedang-
kan stasiun MCS berlokasi di Colorado Springs. Lokasi dari sta-
siun-stasiun tersebut ditunjukkan pada Gambar 9.8.
tr
o
&
Master Control Station+ Monitor Station
Monitor Station
Ground Antenna Station
Colorado Spnhgs (USA)
Gambar 9.8 Lokasi stasiun-stasiun sistem kontrol GPS
Dalam segmen sistem kontrol GPS ini, MS bertugas mengamati
secara kontinyu seluruh satelit GPS yang terlihat (mencapai 11 sa-
telit pada kedua frekuensi L1 dan L2). Pada prinsipnya stasiun MS
tidak melakukan pengolahan data, tetapi hanya mengirimkan data
pseudorange serta pesan navigasi yang dikumpulkan ke MCS untuk
diproses secara real-time. Setiap stasiun MS ini beroperasi secara
otomatis, tidak dijaga oleh orang (unmanned), dan dioperasikan de-
ngan pengontrolan jarakjauh dari MCS. Contoh foto dari suatu sta-
siun MS yang ada di Diego Garcia, ditunjukkan pada Gambar 9.9.](https://image.slidesharecdn.com/1520geodesisatelit-160412154021/85/geodesi-satelit-survey-96-320.jpg)
![Gambar 9.9 Foto stasiun MS yang juga GAS di Diego Garcia [Kaplan, 19961
. Seruruh data yang dikumpulkan oleh MS ini kemudian dikirim-kan ke MCS untuk diproses gr.,u _"_peroleh parameter_param_
eter dari orbit satelit
!,an y3f<tu, serta parameter_parameter pentinglainnya. MCS sendjrrjrerlokasi tepatn]ra di ConsZhdated. ipace Op_erations center (csoc), pangkalan Angkatan uJ"." pJJ;n, coro_rado Springs. pusat pengolah data dari jaringan operationar controrsgstem (ocs) ini beroperasi secara kontinyu (24 jamper hari, z hariper minggu) dan dioperasikan oreh personil-personil terlatih dariAirForce space command.,Amerika se.i't at" nisamping tugas pengolahandata tersebut, MCS juga bertanggungjawab dalam pengontrolan per_gerakan satelit dalam orbitnyalertJ
"tatu"
kesehatannya.
^ .I""-11
perhitungan tersebut kemudian dikirimkan ke sajah satuGAS, dimana untuk seranjutnya informasi-informasi tersebut be_serta data-data rainnya dikirimkan ke satelit-satelit cpa;;rg,-r.,,_pak oleh stasiun GAS. Seperti halnya stasiun MS, setiap stasiunGAS ini juga beroperasi secara otoriratis, tidak drjaga oreh orang,dan dioperasikan dengan pengontrolan jarak jauh clari MCS.
.Sr.str:rrr .Slalclrl Nttrtttltt:;r I lt:l
Secara umum sistem keqa segmen pengontrol yang dijelaskarl
di atas dapat diilustrasikan secara skematis pada Gambar 9.10.
9.3 SEGMEN PENGGUNA
Segmen pengguna terdiri dari para pengguna satelit GPS, baik
di darat, laut, udara, maupun di angkasa. Dalam hal ini alat pene-
rima sinyal GPS (GPS receiuer) diperlukan untuk menerima dan
memroses sinyal-sinyal dari satelit GPS untuk digunakan dalam
penentuan posisi, kecepatan, maupun waktu.
Komponen utama dari suatu receiver GPS secara umum adalah
lSeeber,1993]: antena dengan pre-amplifier; bagian RF (Radio Fre-
quencg) dengan pengidentifikasi sinyal dan pemroses sinyal; pe-
mroses mikro untuk pengontrolan receiver, data sampling, dan pe-
mroses data (solusi navigasi); osilator presisi; catu daya; unit pe-
rintah dan tampilan; dan memori serta perekam data. Komponen-
komponen tersebut digambarkan secara skematis pada Gambar 9.8.
Patut dicatat di sini bahwa berdasarkan pada tingkat kecang-
gihan komponen-komponen tersebut di atas, receiver GPS yang ber-
edar di pasaran cukup bervariasi baik dari segi jenis, merek, harga,
ketelitian yang diberikan, berat, ukuran, maupun bentuknya.
Gambar 9.6 Iiomponen utama dari receiver GPS [Seeber, 1993]
9.3.1 Klasifikasi Receiver GPS
Ada beberapa cara yang dapat digunakan untuk mengklasifika-
sikan receiver GPS [Seeber, 1993), yaitu antara lain berdasarkan
fungsinya, data yang direkamnya, jumlah kanalnya, ataupun peng-
gunanya.
t-u-,t-- *'r*I
I
aan rampilan
I
A
i
I R.ryin,pun dutn I
t "*"ll
*rf^PengirinanY
a Pemrcsesan data
a Pengontrolan Satelit
a Pengoperasian sistem
salah satu dari
Ground Antenna Station
Master Control Station
(iambar 9.'l0 Skem:r keria sistem kontrol GpS](https://image.slidesharecdn.com/1520geodesisatelit-160412154021/85/geodesi-satelit-survey-97-320.jpg)
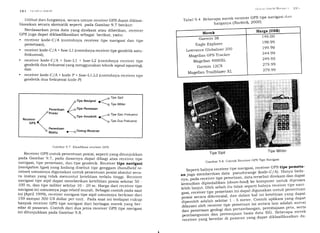
![I lltr t itttr!1,';1 !f111,,1,1
lirrrr lipe ini antara lain adalah: Trimble pro_XRrM,
Magellan proMARKX'M, dan Ashtech Reliance.il- Co^ni; dari receiver tipe pemetaanini ditunjukkan pada Gambar g.d'tf.in",.
-
D-_ari ketiga tipe receiver GpS untuk Denenfrr.h nn^.i^.i r.detik adalah tioe r
;;il ";
j;; ffi:Ti:T **;X?,f;;t#3t#Hfl +l:;Tfrreceiver tipe geodetik.u.mumny" arg"?rlr."n untuk aprikasi-aplikasiyang menuntut ketelitian yang r.tltriii.rg,gi laaii .,f,. i"*
".rrrp^i
dm), seperti untuk pengadaai titik_ti;ik kontrol geodesi, peman_tauan deformasi, dan studi g.oair"mit
".
'l
@Gambar 9.9 Contoh Receiver GpS Tipe pemetaan
Pada saat ini cukup banyak receiver.GpS tipe geodetik yang ber_edar di pasaran, seperti yang a*etu"rty oleh perusr#"r_p".r_sahaan Trimble (seperti 4ooo ssB a"" 4000 ssi), Ashtech (sepertiz-72)' Leica (seperti system ,*L a""'^rren osborne (seperti rurbo
[:ffi]. B:tr"*,ff.1i
..".i,*"tlp"*l"ol.tL i, i i, t,
"I,Ii,., o,o.
slIW
).r
li
0
11
LL
St.slt'rrr.'iltr'/rl Nttt'ttltt:,t ll|i
Untuk lebih memberikan gambaran, Gambar 9.11 mentrn.itrl<
kan perbandingan secara skematis, dalam hal harga dan ketelitiirn
posisi yang dapat diberikan, antara receiver-receiver GPS tipe na-
vigasi, pemetaan dan geodetik.
60-80 Jut
30-35
10-15
?
0,ul-1 ,0 Juta
--+ Ketelitian Postsr
Gambar 9.11 I{arakteristik receiver GPS untuk penentuan posisr
(Harga pacia saat lUSD = Rp 2500)
Berbeda dengan receiver untuk penentuan posisi, receiver GPS
untuk penentuan waktu (timing receiuer) didesain hanya untuk
memberikan informasi tentang waktu ataupun frekuensi yang teli-
ti. Receiver ini umumnya dilengkapi dengan keluaran 1 pps (pulse-
per-secondl. Beberapa receiver tipe ini juga dilengkapi dengan re-
ceiver Loran-C, dalam rangka untuk meningkatkan keandalannya.
Beberapa yang lain juga dilengkapi dengan jarn atom Rubidium
atau Cesium, dalam rangka untuk meningkatkan stabilitas jangka
pendek (short terml rnawpun jangka panjangnya (long term).
Disamping untuk penentuan waktu dan frekuensi secara teliti,
receiver tipe ini juga dapat digunakan untuk aplikasi-aplikasi se-
perti transfer waktu antar benua, sinkronisasi jaringan telekomu-
nikasi digital, maupun sinkronisasi jaringan pembangkit tenaga
listrik. Beberapa receiver penentuan waktu yang beredar di pasar-
an saat ini antara lain adalah GNSS-3OOT dari 35 Navigation; TTR-
6, T"[R-6A, dan TTR-4P dari Allen Osborne Associates; dan GPSync-
ISA dari Odetics Telecom. Contoh dari suatu receiver GPS untuk
penentuan waktu ini ditunjukkan pada Gambar 9.12.
3-10 m 5-'10 m
Geodetik(Dua-Frekue ns )
Geodetik (Satu-Frekue ns I
Gambar 9. 10 Contoh Receiver GpS Tipe Geocletrk](https://image.slidesharecdn.com/1520geodesisatelit-160412154021/85/geodesi-satelit-survey-99-320.jpg)
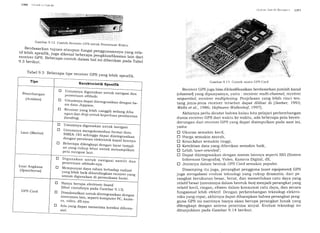
![l ()O (ilorlr,..;r Srllr,lil
Monopote Helix Spiral Helix Micro.rtrip
Gambar 9.15 Beberapa jenis antena
Card
-* $@-;+
rry $ffiflf W
,,1;i:1ff,,ffi
t>@@t* chip
Srslcnr Srrlr,/rt Naurr;rrsr l() I
9.4 SISTEM WAKTU SATELIT DAN GPS
Satelit GPS beroperasi dengan menggunakan sistem waktunya
sendiri, yaitu sisfem uakfit satelit. Sistem waktu ini didefinisikan
oleh jam-jam atom yang berada di setiap satelit GpS. Setiap satelit
GPS Blok II/IIA yang beroperasi saat ini membawa empat buah
jam atom, dua Cesium (Cs) dan dua Rubidum (Rb). Semua freku-
ensi yang dibangkitkan di satelit serta waktu pentransmisian untuk
kode-C/A, kode-P(Y), dan pesan navigasi, adalah mengacu pada,
sistem waktu ini. Meskipun begitu patut dicatat di sini bahwa data
yang berada dalam pesan navigasi adalah mengacu ke sistem u-takfit
GPS lLeick, 19951.
Sistem waktu GPS adalah sistem waktu berskala kontinyu yang
didefinisikan oleh jam (atom) utama yang berada di Moster control
Station (MCS) GPS di Colorado Springs. Sistem waktu GpS ini bere-
ferensi ke sistem waktu UTC (Uniuersal Time Coordinated) yang di-
kelola oleh USNO (United Sfates Naual Obseruatoryl, dan keduanya
mempunyai hubungan yang terdefinisi secara teliti sampai tingkat
1 n sec. Perlu dicatat di sini bahwa karena adanya leap second.
pada skala sistem waktu UTC, serta adanya dift pad,ajam MCS,
maka sistem waktu GPS tidak identik dengan sistem waktu UTC.
Kedua sistem ini terhubungkan melalui sistem waktu rNl (Interna-
tional Atomic Clockl melalui persamaan-persamaan berikut
lHoffmann- Wellenhof et. al., 1997 l:
cPS + 19."000,
UTC + (1. "OOO).n
Pada persamaan (9.2) di atas, nilai bilangan integer n secara
formal diumumkan oleh IERS (/nfernational EorthRotation seruicel.
Sebagai contoh, pada bulan Juni 1996, nitai n adalah 3O, yang
berarti waktu GPS berbeaa'i f detik dengan waktu UTC pada saat
tersebut.
Waktu GPS dinyatakan dengan bilangan minggu serta fiumlah)
detik sejak awal minggu yang bersangkutan pada saat tersebut.
Minggu GPS selalu dimulai pada tengah malam (UTC) antara hari
Sabtu dan Minggu. Oleh sebab itu waktu (detik) GpS berubah dari
O di awal minggu, sampai 604800 di akhir minggu. Bilangan Minggu
GPS dimulai pada tanggal 5 Januari 1980 jam 0:O0 UTC. Sejak
saat itu bilangan minggu GPS bertambah satu setiap minggunya,
dan dipancarkan sebagai bagian dari Pesan Navigasi GpS. Bilang-
an minggu GPS adalah modulo dari 1024. Ini berarti bah.wa pada
akhirminggu ke 1O23, bilangan minggu GPS akan kembali (roilouerl
ke bilangan O. Ini akan terjadi pada tanggal 21 Agustus 1999 jam
0:OO UTC.
Garnbar 9.'l 4 Evolusi rekrr.ologi UE (Uscr Equipmerttl GpS
IGPSJPO, t9961
9.3.2 Antena GPS
Komponen dari alat oenerima sinyal GpS yang cukup pentingadalah antena. Bahkan dalam p".r.rirr.., posisi dengan CeS, y.rgditentukan secara langsung
"et..,.^.nya adalah posisi dari antenaGPS, yaitu pusat erektronis (fase)-nya. Antena cps uerrungsi men_deteksi dan menerima gelombang elektromagnetik yang datang darisatelit GPS, serta mengubahnya menjadi arus listrik. Arus tistrikini setelah diperkuat akan dikirimkan ke kompone, eiettronikadari receiver untuk diproses rebih ranjut. Antena crs ai=.*pi.rgharus mempunyai polarisasi lingkaran untuk dapat mengamati si_nyal GpS, juga harus mempunlai sensitivit"" V""g ii"lgi untukdapat mendeteksi sinyal GpS yang relatif tem.fr. 6i".iipirrg it,antena GpS harus mempunyai karakteristik sedemikian rupa se_hingga rlapat meng:T3ti sinyal yang datang dari semua arah danketinggian dengan baik. Antena'Gps untuk keperruan survai danpemetaan sebaiknya juga-mempunyai stabilitas pusat fase (phasecenter) yalg tinggi serta 'daya torak, terhadap *"rtrp"ii.
"
Ada beberapa jenis antena^-GpS yang dikenal, yaitu [Seeber,l993]:monopole ataw dipole, qtadrifilar hetix(ugadinamakan uolute), spiralhelix, microstnp (iuga
-dinamakan
p aich1,
-dan
cho ke nng. Beberapadiantaranya ditunjukkan pada Gambar 9.15.
IAT
IAT
(e.1)
(e.21
Choke Ring
GPS](https://image.slidesharecdn.com/1520geodesisatelit-160412154021/85/geodesi-satelit-survey-101-320.jpg)
![lrl'2 ( itttt lt',;t ,ttlt,ltt
Al<lrirrr.ya patut dicatat di sini bahrva pesan navigasi GPS me-
ngandung parameter-parameter koreksi untuk mengkonversikan
sistem waktu satelit ke sistem waktu GPS. Dalam hal ini untuk
pelayanan PPS (Precise Positioning Seruice) yang berbasiskan pada
penggunaan kode-P, ketelitian waktu yang telah dikoreksi adalah
176 nsec (95"/"), dan untuk pelayanan SPS (Standard Positioning
Seruice) yang berbasiskan pada penggunaan kode-C/A, ketelitian
waktu tersebut adalah 363 nsec (95%l fLeick, 19951.
9.5 KEMAMPUAN GPS
GPS dapat memberikan informasi mengenai posisi, kecepatan,
dan waktu secara cepat, teliti, dan murah dimana saja di bumi ini
pada setiap waktu, siang maupun malam tanpa trergantung pada
kondisi cuaca. Sampai saat ini, GPS adalah satu-satunya sistem
navigasi atau sistem penentuan posisi yang mempunyai karakte-
ristik prima seperti itu. Disamping produk dasar tersebut (posisi,
kecepatan, dan waktu), sebenarnya ada beberapa parameter lain-
nya yang dapat ditentukan dengan teknologi GPS ini. Parameter-
parameter tersebut ditunjukkan pada Gambar 9.16.
Dalam hal penentuan posisi, GPS dapat memberikan ketelitian
posisi yang spektrumnya cukup luas. Dari yang sangat teliti (orde
milimiter, relatif) sampai yang biasa-biasa saja (orde puluhan me-
ter, absolut). Ketelitian posisi yang diperoleh secara umum akan
bergantung pada empat faktor, yaitu : metode penentuan posisi
yang digunakan, geometri dan distribusi dari satelit-satelit yang
diamati, ketelitian data yang digunakan, dan strategi/ metode peng-
olahan data yang diterapkan. Kecepatan wahana yang bergerak juga
dapat ditentukan oleh GPS seandainya wahana tersebqt dileng-
kapi dengan alat penerima sinyal GPS. Ketelitian berorde mm/de-
.St.sll'ttt .5rrlr'lll Nttt'ttlttr'l I
()'l
tik sampai cm/detik dapat diperole.h 9-1"*
hal ini' Selair-r tttctttltt'
rikan infor*."i t"'tff;Ji"' GP:,]:;; aapat digunakan untttk
mentransfer waktu i"i""tut tempat ke Lmpat lain' Ketelitian satn-
oai beberaot t"t'oJJt';;;;;; aiut'iltttt oLh GPS untuk transrer
waktu antar benua'
9.6 KONDISI PASAR GPS
Teknologi CpS V^tg sudah semakin banyak digunakan dalam
berbagai bidang #il-J:;li'i"ii"r.n memiliki panssa pasar vans
cukup besar dt' o*:;"ffi!i;,11":lkan
hasil survai industri vang
telah di1ak".'^tt^" Jtlr' NAPA l,atro'u.,i academy of Pubtic Admin-
istration),suatu r"*"olgt ii1*;t1rt" s"i'tx' diperoleh- suatu ka-
rakteristik segmen p1; ^o|!
oi a""i" p"i"'tahun 1995 yang di-
il"l"r.t"" Pada Gambar 9'17 '
199s I NAPA, 1995]
Gambar 9 17 Kondisi Pasar Dunra (rl-r Pdt
Dari Gamb ar 9-17 terlihat bahwa segmen-perhubungan darat
merupakan segmen pasar GpS yang pJtirrg b""^r, yaitu.sebesar
32oh. sedaHgkan ;ffi"i ;[J:ll,'^'i'i' ""tul"
diwakili oleh
segrnen maritim, :t-ig^ ""U"gi1t"V11Yn
terdapat dalam segmen
ilmu pengetahuan itt ""iti'
serta.
"tgt""
rlkreasi' Meskipun
tidak sebes^,
""**ff;t;tf*;;a1 l3ra"t'
tetapi sesmen- vang ter-
kait denga,,
''"ptft-i"p!t
t"tttttu' ters^ebut relatif cukup besar por-
ffi;;;fi;;dingkan ""
g*.''-'" gmen lainnva'
Survai ind'ustri dari NAPA ini juga memperkirakan bahwa volu-
me pasar GPS axJ^;";" membesar di masa-masa mendatang'
Proveksi au'ti
'or'-""p"""t
CpS dunia ini berdasarkan segmen-
Parameter
yang bia
ditentukan
dengan GPS
1 Posisi iffi
1 Kecepatan ;%ffi* produk Dasar
j Waktu :jffit-'
j Percepatan
q Attitude parameters
a TEC (Total Electron Content)
1 WVC (Water Vapour Content)
1 Polar motion parameters
I Tinggi ortometrik
3 Undulasi Geoid
I DefleksiVertikal
Perlu dikombinasikan
dengan informas
eksternal dari
sistem lainnya
Beragam Aplikasi
Gambar 9.16 Produk GPS
US$ 729 iuta
(()INc NAIA l r95 lxhs[Y strn
')
GPS Pada tahun](https://image.slidesharecdn.com/1520geodesisatelit-160412154021/85/geodesi-satelit-survey-102-320.jpg)
![l<)4 (;(?)(.1.'.)^r Srrtc/il
segmennya diberikan pada Gambar 9.1g. Menurut studi NApA ini,pasar GPS yang bernilai tJS$ 2,222 milyar di tahun 1995, akanmembesar dan bernilai US$ 11,633 milyar di tahun 2O0O dan ber_
nilai US$ 31,036 milyar di tahun 2005.
Sislerrl Snterlil Nttttttlrt';r I
( )lr
Seperti halnya GPS, GLONASS pun didesain untuk dapat merrr
berikan posisi, kecepatan, dan waktu, dimana saja permukaan bumi
ini pada setiap saat dan waktu tanpa bergantung cuaca. Prinsip
penentuan posisi menggunakan sistem-sistem ini juga pada dasar-
nya sama, yaitu dengan mengukur jarak ke beberapa satelit seka-
ligus. Karena adanya kemiripan dalam fungsi dan tujuannya, maka
tidaklah mengherankan bahwa karakteristik orbit dan sinyal dari
kedua sistem juga mempunyai kemiripan-kemiripan, seperti yang
dapat dilihat pada Tabel 9.6.
L10
6
.>
Ea
Oa
l
4
;
i
?
Gambar 9.18 Proyeksi pasar GpS sampai tahun 2005 [ NAPA, 199S]
9.7 GLONASS, SATELIT NAVIGASI RUSIA
Pada saat ini kalau kita berbicara tentang sistem satelit naviga-
fi "T"T"Va orang akan langsung teringat pada GpS (G/obcl posr,
tioning system), satelit navigasi *ilik Arrr"rika serikat. Gps me-
mang harus diakui merupakan sistem satelit navigasi yang paling
bajk dan paling banyak digunakan orang saat ini. Meskipun begitu
sebenarnya ada satu sistem satelit navigasi lainnya V"rig::rg.
"r_kup menjanjikan
""11k
digunakan, yaitu sistem mitit n"ust" y.rgbernama GL.NASS. (Grobat Nauigatiin sateritesysfem). Bentuk fi-sik dari satelit ini ditunjukkan pada Gambar g. r-g uerit<ut.
Tabel9.6 Perbandingan antara GPS dan GLONASS
GPS GLONASS
Paramete, Nominal dari Orbit Satelit
Ririan.a Orbit 6 buah. densan spasi 6O0 3 buah. densan spasi 120o
Jumlah satelil
per orbit
4 buah, dengan spasi
tidak sama
8 buah, dengan spasi sama
Inklinasi Orbit 550 64,80
Radius Orbit 26 560 km 25510 km
Peiode Orbit I l2 h.ari bintang
= 11 iam 58 menit
8l17 hasi bintang
e 11 iam 16 menit
Eksentrisitas
Orbit
O (lingkaran) 0 (lingkaran)
Parameter Nominal dari Sinyal Satelit
Gelombang
pembanua
Lt = 1575,42 M}z
L2 = 1227,60 MHz
Ll = (1602 +9kl16lMt]z
L2 = (t246 + 7kl16) M]:,z
k = nomor kanal (channel)
Kode
(code)
Berbeda untuk setiaP satelit
Kode-C/A pada L1
Kode-P pada Ll danL2
Sama untuk seluruh satelit
Kode-C/A pada L1
Kode-P pada Ll dar: L2
Frelanensi
k.ode
Kode-C/A = 1,023 MHz
Kode-P : 10,23 MHz
Kode-C/A = 0,511MH2
Kode-P = 5,11 MHz
Data jam
(clock)
Clo ck Offset, Fre qu encg
Offset, dan Frequencg Rate
Clock dan Frequencg Offset
Data OrbitaL Elemen-elemen orbital
Keplerian setiap satu jam
Koordinat, kecepatan, dan
percepatan satelit setiap se-
tengah jam.
Sistem dan Kerangka Referensi
Sistem
Koordinat
Earth-Centered Earth-Fixed
(ECEF)
Earth- Centered Earth-Fixed
(ECEF}
Datum
Geodetik
World Geodetic System 1984
(wGS - 84)
Earth Parameter System
r99o (Pz-gol
Referenst
Waktu
UTC (USNO) UTC (SU)
Gambar 9.19 Bentuk tipikal satelit GLONASS fSeeber, 1993]](https://image.slidesharecdn.com/1520geodesisatelit-160412154021/85/geodesi-satelit-survey-103-320.jpg)


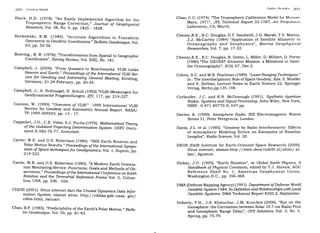
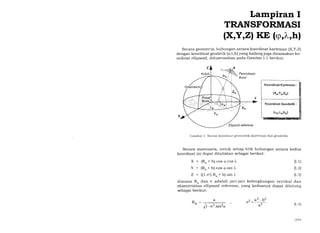
![tanl = Y/X (I.5)
Selanjutnya kalau kuadrat dari (I.1) ditambahkan dengan kua-
drat dari (I.2), maka akan didapat:
:l IO (ir1)(/.,rjr.'(/l('/rl
rlimana a dan b adalah setengah sumbu panjang dan
sumbu pendek dari ellipsoid referensi yang digunakan.
Dari rumus-rumus di atas terlihat bahwa seandainya
gi dengan (I.1) akan diperoleh:
h = (p/cos 9) - R,
dimana:
p = (x, +Y2)/2
Kalau pers. (1.6) disubstitusikan ke persamaan (I.3) akan
persamaan berikut:
Z + R*.e2.sir, g
Z + R
*.e2.
sin <0n
- t
rarl(9n=T
Untukprosesiterasinilaipendekatanawaluntuklintang,<po,dapat
ditentukan dengan ,,r*r" berikut lGeardan & Deakin' 1999]:
Z(1+ .e'2)
tanO^=-,U P
setengah
(I.2)diba-
l,trtrtltrrrtn I ')l I
(r e)
(r.10)
(r.12)
(r 6)
(r.7)
diperoleh
dimana eradalah eksentrisitas kedua dari ellipsoid referensi yang
dapat dihitung dari persamaan berikut:
e'2 = ezl$-e?l (r. 1 i)
proses iterasi dihentikan jika perbedaan nilai lintang yang diperoleh
dari dua tahap iterasi telah lebih kecil dari kriteria minimum yang
telah ditentukan:
t2l1 (p = (r.8)
p
Dari persamaan (I.5) terlihat bahwa bujur l" dapat langsung di-
hitung dari komponen koordinat X dan Y. Komponen lintang p,
sebagaimana terlihat dari persamaan (I.8) tidak dapat langsung di-
hitung dari koordinat (X,Y,Z). Sedangkan untuk menentukan tinggi
ellipsoid, komponen lintang harus ditentukan terlebih dahulu.
Dari penjelasan di atas terlihat bahwa transformasi dari (X,Y,Z)
ke (g,l",h) tidak dapat dilakukan secara langsung seperti halnya
dari (q,l.,h) ke (X,Y,Z). Telah banyak metode yang diajukan untuk
menyelesaikan proses transformasi tersebut. Pada semua metode
tersebut, penentuan komponen bujur dan komponen tinggi semua-
nya adalah sama, yaitu menggunakan persamaan (1.5) dan (1.6).
Perbedaan dari semua metode tersebut terletak dalam penentuan
komponen lintangnya.
Berikut ini akan dijelaskan secara singkat algoritma matematis
dari metode-metode transformasi tersebut.
I. I Metode Iterasi Sederhana
Metode transformasi koordinat ini banyak dijelaskan dalam buku-
buku ajar geodesi dan banyak diimplementasikan karena
algoritmanya yang relatif sederhana.
Pada metode ini komponen lintang geodetik ditentukan secara
iteratif dengan menggunakan persapnaan dasar berikut:
I
,0,. -.rr,
- rl . kriterid minimum
1.2 Mdtode Paul
Metode Paul lPaul, 1973] adalah met-ode transformasi langsung
(non-iteratif), dimana komponen lintang geodetik ditentukan de-
ngan rumus berikut:
tanQ =
dimana:
(. = J1+
+Zl2
p
(r. i3)
(r.14)
(r.1s)
(r.16)
Parameter-parameter cr, p, dan t pada persamaan (I' 14) di atas'
ditentukan dengan persamaan-persamaan berikut:
o2 + a2.e4
Cf = :-------^
l-e'
t,=o'-*''ol- e'
(u*r' z2 B
t = l' l.p+--
[6 ) t2 6
(r.17)](https://image.slidesharecdn.com/1520geodesisatelit-160412154021/85/geodesi-satelit-survey-111-320.jpg)
!['.,. I '-'.
I 'i r rl;r
r i, ttlr",r ,'ltlt ltl
pcrsamaan (I.17) di atas, parameter p dihitung dari:
ltttrtltrrrttr I 'll.l
(r.2s)
(1.26]'
M, N, dan I
(t.27)
(r.28)
, =
; 1[r.,G,-)'/'*[o*!E'-)-'l'f
(r.18)
dimana:
Q - 1r 27.22.(..2-]t
2.($+Z'l'
Perlu dicatat di sini bahwa pada metode
pada persamaan (1.14) di atas mempunyai
ngan nilai Z lGerdan & Deakin, 19991.
I.3 Metode Bowring
Metode Bowring pada prinsipnya adalah juga metode iteratif.
Namun karena karakteristik persamaan yang digunakan dapat di-
anggap sebagai metode langsung, karena untuk semua kasus prak-
tis, iterasi kedua atau ketiga tidak diperlukan lBouing, 1976).
Pada metode ini komponen lintang dari koordinat geodetik ditentu-
kan dengan persamaan berikut:
z +.'2b.sin3e
e = arc tan
p - "2.o"3e
(r.2ol
dengan
(r.2r)
1.4 Metode Ozone
Metode Ozone [Ozone, 1985] adalah metode transformasi non-
iteratif, dimana komponen lintang geodetik ditentukan dengan ru-
mus berikut:
2autan (p =
u 1u2 - i1
(r.22)
dimana parameter u dihitung dari persamaan:
2Mr.l r.IG
lt= - 2
Pada persamaan di atas:
(r.23)
dimana:
K _ 2.(N-M.r)
J
Pada persamaan (I.25) dan (I.26) di atas, parameter
dihitung berdasarkan persamaan-persamaan berikut:
, =
a'P-(a2-b2)
2.b.2
* _ a.p+(a2-b2)
2.b.2
dimana:
f(V") = 2sin(ry"-O) -c.sin2ry"
.I=
(r.1e)
Paul ini semua akar
tanda yang sama de-
.i]"'-
[
( za
0 = arc,""
[;;J
(r.30)
(r.31)
(r.32)
2l + 4M2
(t.2el
dimana:
V=4.N.M+1
W = 2.(N'?- M'z)
Pedu dicatat di sini, bahwa setelah komponen lintang geodetik
dihitung berdasarkan persamaan (1.22), tandanya ditentukan ber-
dasarkan tanda dari komponen koordinat Z.
I.5 Metode Borkowski
Metode Borkowski lBorkou.tski, 1989] adalah metode transfor-
masi iteratif, dimana komponen lintang geodetik <p ditentukan ber-
dasarkan rumus berikut:
tan<p = f,.tunv
Pada persamaan di atas lintang-lintang geosentrik ry (pada bi-
dang bola berjari-jari a) ditentukan secara iteratif dengan teknik
Newton, berdasarkan persamaan berikut:
Vr+1 = V., (r.33)
(I.34)
lvJf (vrr)
G : (2M + J)'- 4(l - K) (r.24)](https://image.slidesharecdn.com/1520geodesisatelit-160412154021/85/geodesi-satelit-survey-112-320.jpg)
!['-), 1,1 ( ir,or,lr,.sr Srrlclrf
f'(V") = 2cos(ry"-Q) -2c.cos2V, (r.3s)
Pada persamaan (I.34) dan (I.35) di atas, parameter Q dan c dihrtung
dari persamaan-persamaan berikut:
o = atan[!Z]
[
".p.J
Pada penentuan y secara iteratif dengan persamaan (I.33) s/d
(I.35), nilai awal Vo yang digunakan dapat ditentukan dari persa-
maan berikut:
-4o2 -422f1m,,; =--rj-----
/ 2m" ( 2m"
a.[a + .",J b.[b+
b".,J
dimana:
l,tttttlttrtttr l')li,
(t.44l'
(r.4s)
f(m,,) =
p2 - z', _,
--r,"f-a--;f-'la+ nl lu+ 'tl
I a] I, b)
I.6 Metode Lin & Wang
Metode Lin & Wang lLin & Wang, 1995] adalah metode transfor-
masi iteratif, dimana komponen lintang geodetik <p dan tinggi ellip-
soid h ditentukan berdasarkan rumus berikut:
(r.3e)
(r.40)
dimana h negatif kalau b *lZl ) t"tif, kecil dari {V, *lZ"l1.
Pada persamaan (I.38) dan (I.39) di atas, parameter-parameter
p, dan Z" dihiturig berdasarkan persamaan:
D=,E
Nilai awal mo untuk proses iterasi di atas dapat dihitung dari
rumus berikut:
(1.461
1.7 PerbandinganAntarmetode
Gerdan & Deakin (1999) telah membandingkan kinerja dari ke-
enam metode transformasi di atas dalam mentransformasikan ko-
ordinat kartesian geosentrik (X,Y,Z) ke koordinat geodetik geosen-
trik (9,)",h).
Dalam perbandingan tersebut digunakan 225450 titik perhitung-
an berinterval O,10 yang terletak antara lintang 5oS sampai 5005
serta bujur 1100T sampai 1600T (daerah benua Australia dan seki-
tarnya) pada ellipsoid referensi GRS 1980. Setiap titik diberi ke-
tinggian ellipsoid yang sama yaitu h = 10000 m. Algoritma kompu-
ter ditulis dengan Borland C++ versi 5.0A, dan pengolahan data
dilakukan menggunakan komputer PC Pentium 133 MHz. Hasil
perbandingan ditunjukkan pada Tabel I.1 berikut.
Tabel I.1 Hasil perbandingan enam metode transformasi
koordinat; dari lGe4dan & Deakin, 19991
Metode
Transformasi
Kesalahan maksimum Waktu
Pemrosesan
relatifq (secl h (ml
Lin & Wang 6,87e- 1 1 2,53e-O9 42
Bowring 2,88e-OB 1,01e-06 50
Paul 3,9Oe-O7 1.14e-06 52
Ozone 6,87e-ll 2,42e-O9 56
Iterasi Sederhana 1,35e-05 6,1 2e-05 62
Borkowski 2,88e-08 1,01e-06 63
( a.z
U r atan r-l'o [up]
^22a .Ln
, o2.pe
(r.36)
(r.37)
(r.38)
(r.41)
(r.42)
- u2.b2.1u2.2' *b'.p'2f t2a.b.{a2.22 +b2
z)
)
4.22 +b4.p("
.p
2.
l+:--
^2
7_p-u-,*'*
b2
Nilai parameter m pada persamaan di atas ditentukan secara
iteratif dengan teknik Newton berdasarkan persamaan berikut:
f(m )
mmn+l = n- f'(mn)
(R-Ru)2 +(z-zr)2
(r.4s)](https://image.slidesharecdn.com/1520geodesisatelit-160412154021/85/geodesi-satelit-survey-113-320.jpg)
![I ttrttltrt rtrt ll ') |
(
I
2 t ti ( itnrlesr Sateltt
Model transformasi, yanq 9d."T,
konteks geodesi dinamakan
moderBursa-worr;T;r'";;it::l'ffi
;&"^tT"t*".?;t:'ilt?:i
H; '"il;i ":111iilu;:i:.ufffi#ar tr t
seperti Yang ditunl
Gambar Il' 1 Model transformasi similaritas 7 parameter'
Padarumus (lI'1)' berdasarkaigl**II' i di atas maka matriks
rotasi R dapat dihitu;;;iJ''"u'tt' rumus berikut:
R = R,(r) . Rr(o) 'R,(ro)
[I'2)
dimana *^ (tu), R, (e), *,t5] qi',ii"9'#lt'i:;Jiff:rlT'?:11il?
il"J"g *"sing
"sumbu X' Y' d'arr r"
sebagai berikut:
Untuk sud'ut-sud'ut rotasi yang'relatif kecil (
' 10")' maka for-
mulasi di atas dapat diaproksimasi dengan formulasi berikut:
f cos. co$
R=l-sim.co$
I sire
cosi . sir$ sis'r + sim com
- sirr. sirO . sinl + cos< cogD
.. cose sim
cos. sir€. coscr + sim. sin,, I
sirx . sir€ . coso * cos. . sim ]
co$.cou ]
(ll.tr)
(rr.7)
(il.8)
ut.e)
0L 10)
(Ir.1 r)
t1 x -e'l
*=l-* I "lle -., tlL'
;
I
I
Ada beberapa faktor yang menyelabkan transformasi similaritas
iti';;;;;t PoPuler' Yaitu antara lain:
. Jumlah parameter transformasinya relatif sedikit' yaitu tujuh (7)'
. Mudah diimplementasikan dalam bentuk perangkat lunak'
: ,;;irTttit ""r.rtu
antara dua jaringan yang diperlukan relatif
tidak terlalu banyak (minimal 3 titik sekutu)' dan
. Cukup teliti untuk menghubungkan dua jaringan yang homogen
'
ilr,"urr..a" distorsi lokal pada skala atau orientasi).
Akhirnya perlu ditekankan di sini bahwa model Bursa'Wolf yang
diformulasikan seperti pada persamaan (II'1) punya sedikit kele-
ii"n"*-r"ia" 3ita'modet ini digunakan pada jaringan yang relatif
kecil, maka parameter-parameter rotasi akan mempunyai korelasi
tinggi dengan p''tametet-parameter translasi' Untuk menghindari
oroblem korelasr rni' maki salah satu alternatifnya adalah dengan
#;il;;r;an model Molodenskv-Badekas van g dapat d iformula-
"ii."i1"ttgai
berikut:
f *"-1 [*.] [*o - **-1 [:ll
li:l
=
l;:l-=
.l;:-)':l.[t]
[r ^,:,.1 (r s)
n'tt'r) = lO cos o sln o
1
Lo - sin or cos r^ll
Seandainya persamaan (11'3)' (ll'4)' dan (lI'5) disubstitusikan ke
o;;;;;u''it'
maka akan diPeroreh:
dimana (X*J*,Z-) adalah koordinat dari titik pusat jaringan' dimana:
x,^ = !..*,xoti)
ll 1:l
y* =
r.I Ynti)
II 1=l
z- = !.f,zoti)
ll l=l
pada model Molodensky-Badekas ini' meskipun parameter-pa-
,J:;;;;;;*1r."inyu. berbeda, tapi matriks rotasi dan faktor'
skalanYa tetaP sama'
Icosx sin< 0l
Rz(K) =
["T"
*;"
:]
lcos0 O -sin0l
n,1e1 =l o t o IJ'
[sino 0 cos0]
uL3)
(II.4)](https://image.slidesharecdn.com/1520geodesisatelit-160412154021/85/geodesi-satelit-survey-115-320.jpg)

Geodesi adalah ilmu yang mempelajari pengukuran dan pemetaan Bumi beserta medan gravitasinya di ruang tiga dimensi yang berubah secara dinamis. Ilmu ini juga mempelajari bentuk dan ukuran Bumi, planet, dan satelit natural atau buatan serta perubahan-perubahannya dengan menentukan posisi dan kecepatan titik-titik atau objek di permukaan Bumi atau orbitnya dengan sistem referensi tertentu menggunakan pengukuran











































![Modul Ajar Kurikulum Berbasis Cinta (KBC) SKI Kelas 6 [modulguruku.com]](https://cdn.slidesharecdn.com/ss_thumbnails/modulajarkurikulumberbasiscintakbcskikelas6modulguruku-260116161351-6277bdc7-thumbnail.jpg?width=640&height=640&fit=bounds)












