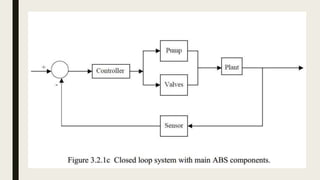
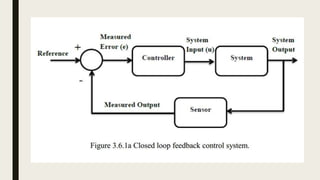
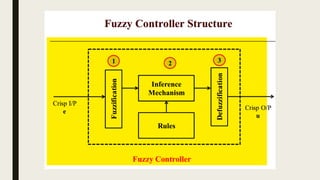
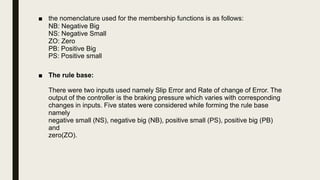
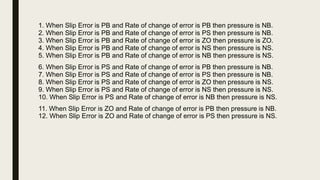
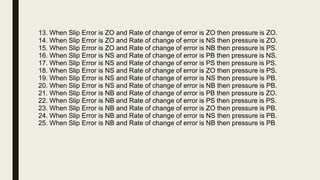
The document discusses an anti-lock braking system (ABS) that uses fuzzy logic control to maintain optimal wheel slip during braking. The fuzzy controller has two inputs - error in slip and rate of change of slip - and one output to vary braking pressure. It uses a rule base of 25 IF-THEN statements to determine appropriate braking pressure based on the inputs to keep wheel slip close to 0.2 for best vehicle stability and stopping performance under different road conditions. Fuzzy logic control is more robust and easier to implement than classical control for ABS.

![Anti-Lock Braking System
This system allows the wheels of a motor vehicle to
maintain frictional contact with the road surface according to
the inputs by the driver, while the breaking prevents the
wheels from locking up.”[13] This locking up of wheels occurs
when the rotation of the wheels comes to a halt. The system
is designed in a way that it prevents the wheels to stop
rotating instantly which could cause the vehicle to skid and
the driver could loose control of the vehicle](https://image.slidesharecdn.com/fuzzy-logic-control-180123223638/85/Fuzzy-logic-control-ABS-3-320.jpg)
![Objectives of Anti Lock Breaking Systems
■ Reduction in Stopping Distance
■ Vehicle Stability
■ Steerability
Slip Ratio % = [(vehicle speed - wheel speed) / (vehicle speed)] x 100](https://image.slidesharecdn.com/fuzzy-logic-control-180123223638/85/Fuzzy-logic-control-ABS-4-320.jpg)












![[Deck] What's New in Spark-Iceberg Integration via DSV2.pptx](https://cdn.slidesharecdn.com/ss_thumbnails/deckwhatsnewinspark-icebergintegrationviadsv2-260210005337-25955b12-thumbnail.jpg?width=640&height=640&fit=bounds)



































