1º bacharelato –debuxo técnico
xeometría descriptiva
sistema diédrico
fundamentos
2.
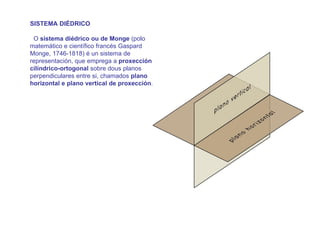
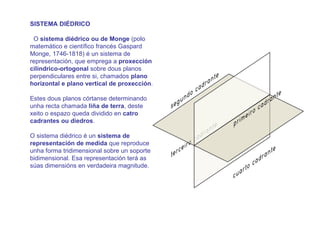
SISTEMA DIÉDRICO
Osistema diédrico ou de Monge (polo
matemático e científico francés Gaspard
Monge, 1746-1818) é un sistema de
representación, que emprega a proxección
cilíndrico-ortogonal sobre dous planos
perpendiculares entre si, chamados plano
horizontal e plano vertical de proxección.
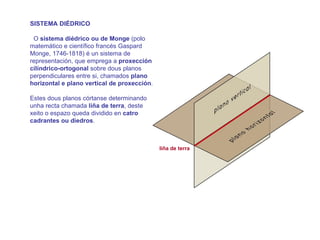
Estes dous planos córtanse determinando
unha recta chamada liña de terra, deste
xeito o espazo queda dividido en catro
cadrantes ou diedros.
O sistema diédrico é un sistema de
representación de medida que reproduce
unha forma tridimensional sobre un soporte
bidimensional. Esa imaxe ten as súas
dimensións en verdadeira magnitude.
3.
SISTEMA DIÉDRICO
Osistema diédrico ou de Monge (polo
matemático e científico francés Gaspard
Monge, 1746-1818) é un sistema de
representación, que emprega a proxección
cilíndrico-ortogonal sobre dous planos
perpendiculares entre si, chamados plano
horizontal e plano vertical de proxección.
Estes dous planos córtanse determinando
unha recta chamada liña de terra, deste
xeito o espazo queda dividido en catro
cadrantes ou diedros.
O sistema diédrico é un sistema de
representación de medida que reproduce
unha forma tridimensional sobre un soporte liña de terra
bidimensional. Esa imaxe ten as súas
dimensións en verdadeira magnitude.
4.
SISTEMA DIÉDRICO
Osistema diédrico ou de Monge (polo
matemático e científico francés Gaspard
Monge, 1746-1818) é un sistema de
representación, que emprega a proxección
cilíndrico-ortogonal sobre dous planos
perpendiculares entre si, chamados plano
horizontal e plano vertical de proxección.
Estes dous planos córtanse determinando
unha recta chamada liña de terra, deste
xeito o espazo queda dividido en catro
cadrantes ou diedros.
O sistema diédrico é un sistema de
representación de medida que reproduce
unha forma tridimensional sobre un soporte
bidimensional. Esa representación terá as
súas dimensións en verdadeira magnitude.
5.
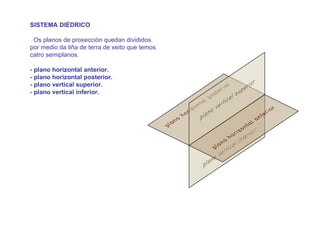
SISTEMA DIÉDRICO
Osplanos de proxección quedan divididos
por medio da liña de terra de xeito que temos
catro semiplanos.
- plano horizontal anterior.
- plano horizontal posterior.
- plano vertical superior.
- plano vertical inferior.
6.
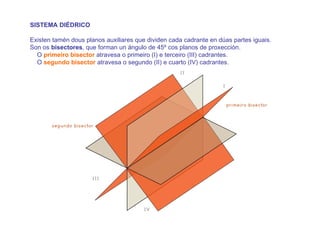
SISTEMA DIÉDRICO
Existen taméndous planos auxiliares que dividen cada cadrante en dúas partes iguais.
Son os bisectores, que forman un ángulo de 45º cos planos de proxección.
O primeiro bisector atravesa o primeiro (I) e terceiro (III) cadrantes.
O segundo bisector atravesa o segundo (II) e cuarto (IV) cadrantes.
7.
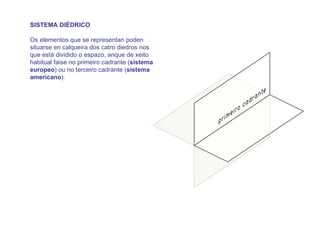
SISTEMA DIÉDRICO
Os elementosque se representan poden
situarse en calqueira dos catro diedros nos
que está dividido o espazo, anque de xeito
habitual faise no primeiro cadrante (sistema
europeo) ou no terceiro cadrante (sistema
americano).
8.
SISTEMA DIÉDRICO
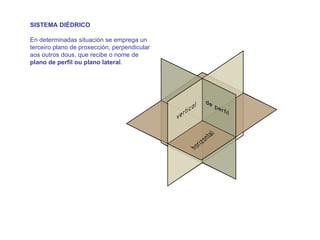
En determinadassituación se emprega un
terceiro plano de proxección, perpendicular
aos outros dous, que recibe o nome de
plano de perfil ou plano lateral.
9.
SISTEMA DIÉDRICO
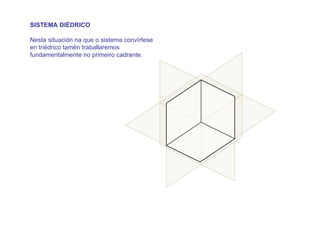
Nesta situaciónna que o sistema convírtese
en triédrico tamén traballaremos
fundamentalmente no primeiro cadrante.
10.
SISTEMA DIÉDRICO
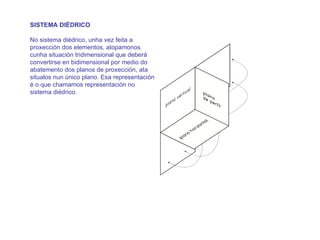
No sistemadiédrico, unha vez feita a
proxección dos elementos, atopamonos
cunha situación tridimensional que deberá
convertirse en bidimensional por medio do
abatemento dos planos de proxección, ata
situalos nun único plano. Esa representación
é o que chamamos representación no
sistema diédrico.
11.
SISTEMA DIÉDRICO
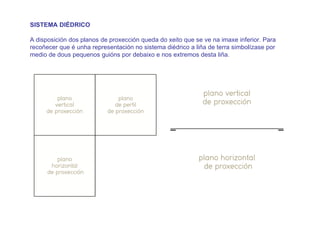
A disposicióndos planos de proxección queda do xeito que se ve na imaxe inferior. Para
recoñecer que é unha representación no sistema diédrico a liña de terra simbolízase por
medio de dous pequenos guións por debaixo e nos extremos desta liña.
12.
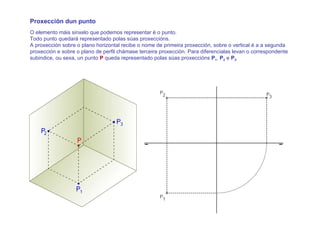
Proxección dun punto
Oelemento máis sinxelo que podemos representar é o punto.
Todo punto quedará representado polas súas proxeccións.
A proxección sobre o plano horizontal recibe o nome de primeira proxección, sobre o vertical é a a segunda
proxección e sobre o plano de perfil chámase terceira proxección. Para diferencialas levan o correspondente
subindice, ou sexa, un punto P queda representado polas súas proxeccións P1, P2 e P3.
13.
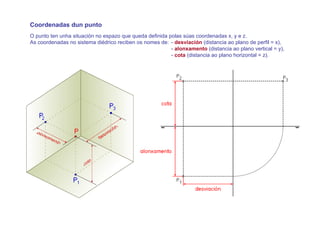
Coordenadas dun punto
Opunto ten unha situación no espazo que queda definida polas súas coordenadas x, y e z.
As coordenadas no sistema diédrico reciben os nomes de: - desviación (distancia ao plano de perfil = x),
- alonxamento (distancia ao plano vertical = y),
- cota (distancia ao plano horizontal = z).