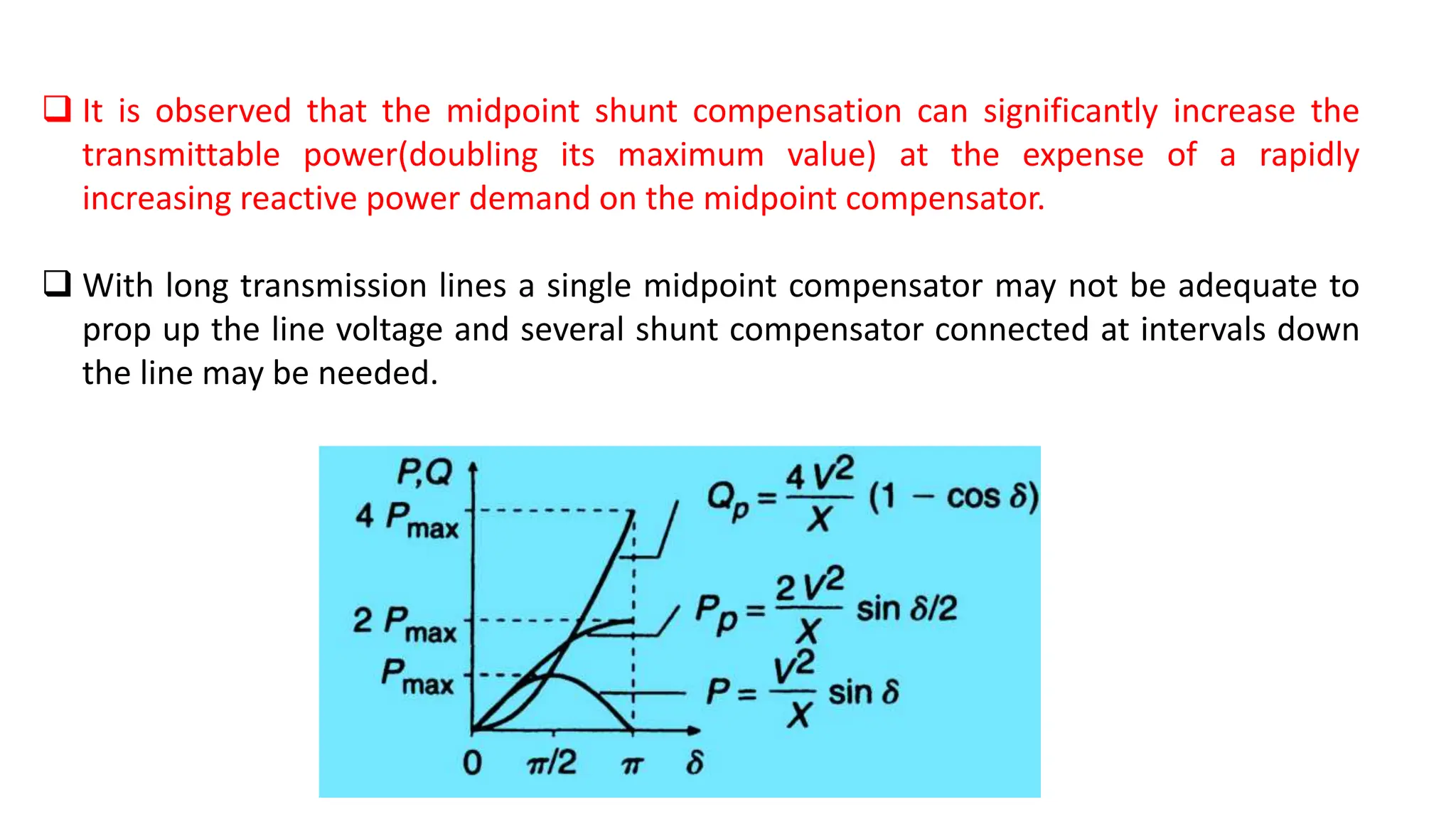
The document discusses flexible alternating current transmission systems (FACTS) with a focus on static shunt compensation and its objectives like voltage regulation, stability improvement, and power oscillation damping. It explains methods of controllable VAR generation and details the importance of midpoint shunt compensation for enhancing transmission capacity and voltage stability. Additionally, it outlines the characteristics and requirements of compensators to maintain synchronous operation and improve system performance under various load conditions.
![Midpoint Voltage Regulation for Line Segmentation
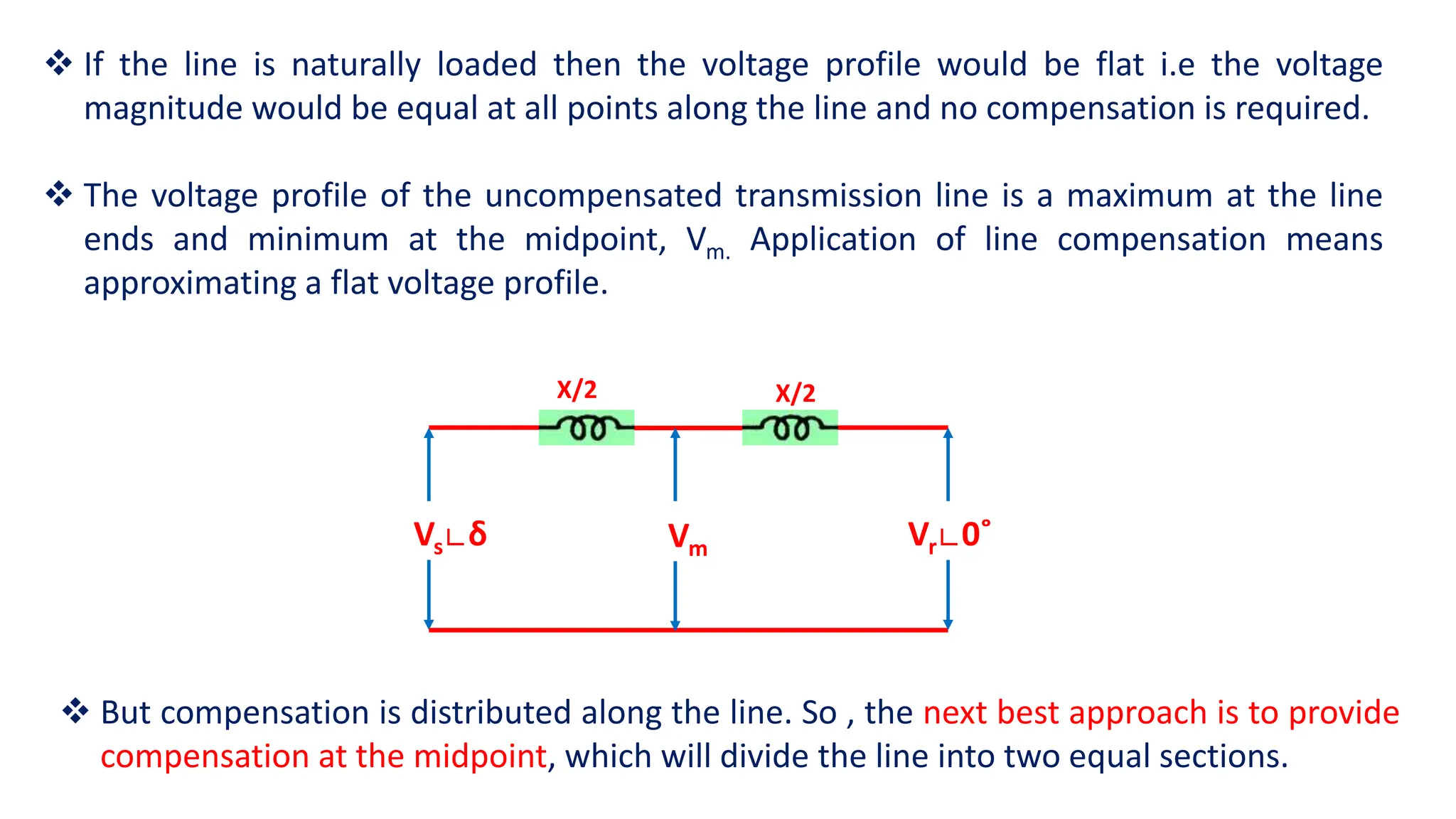
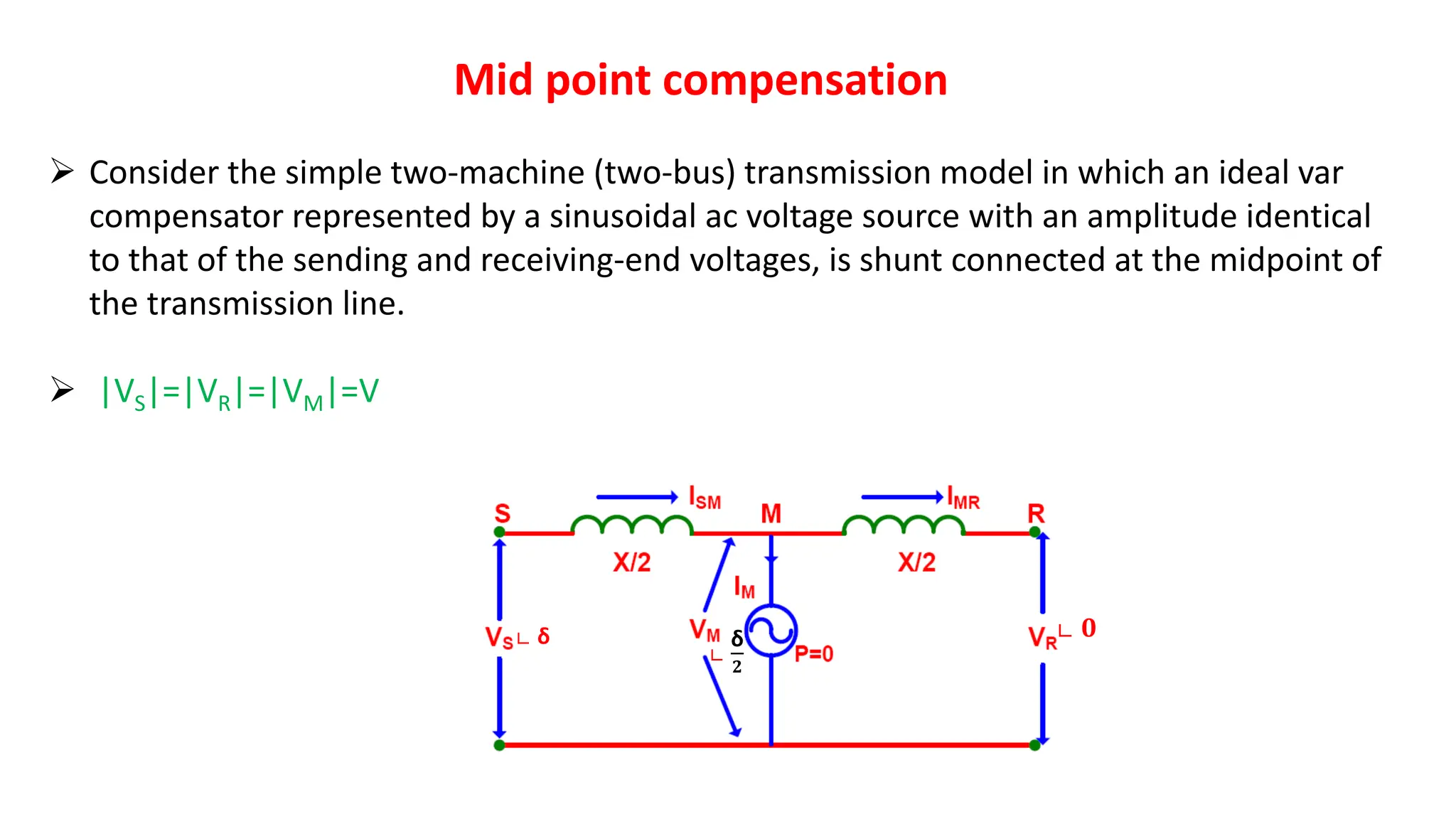
Uncompensated Case: Let us consider a simplified model of the uncompensated system.
Power = Sr=Vr Ir* =Vr [
Vs∟δ − Vr∟0˚
𝒋𝑿
]*
Vr∟0˚
Vs∟
δ
X
I
Vs∟δ
Vr∟0˚
Vx
δ
I](https://image.slidesharecdn.com/factsunit-3part-1-240123063527-12804297/75/Flexible-Alternating-Transmission-Systems-5-2048.jpg)
![Sr=Vr Ir* = Vr [
Vs∟δ − Vr∟0˚
𝑗𝑋
]* = Vr [
Vs∟δ
𝑗𝑋
−
Vr∟0˚
𝑗𝑋
]*
= Vr [
Vs∟(δ−90)
𝑋
−
Vr∟90˚
𝑋
]* = Vr [
Vs∟(90−δ)
𝑋
−
Vr∟90˚
𝑋
]
=
VrVs∟(90−δ)
𝑋
−
Vr2∟90˚
𝑋
Pr =
VrVsCos(90−δ)
𝑋
−
Vr2Cos90˚
𝑋
=
VrVsSinδ
𝑋
------------------------------------------1
Qr =
VrVsSin(90−δ)
𝑋
−
Vr2Sin90˚
𝑋
=
VrVsCosδ)
𝑋
−
Vr2
𝑋
Qr =
Vr
𝑋
(VsCosδ − Vr) −−−−−−−−−−−−−−−−−−−−2
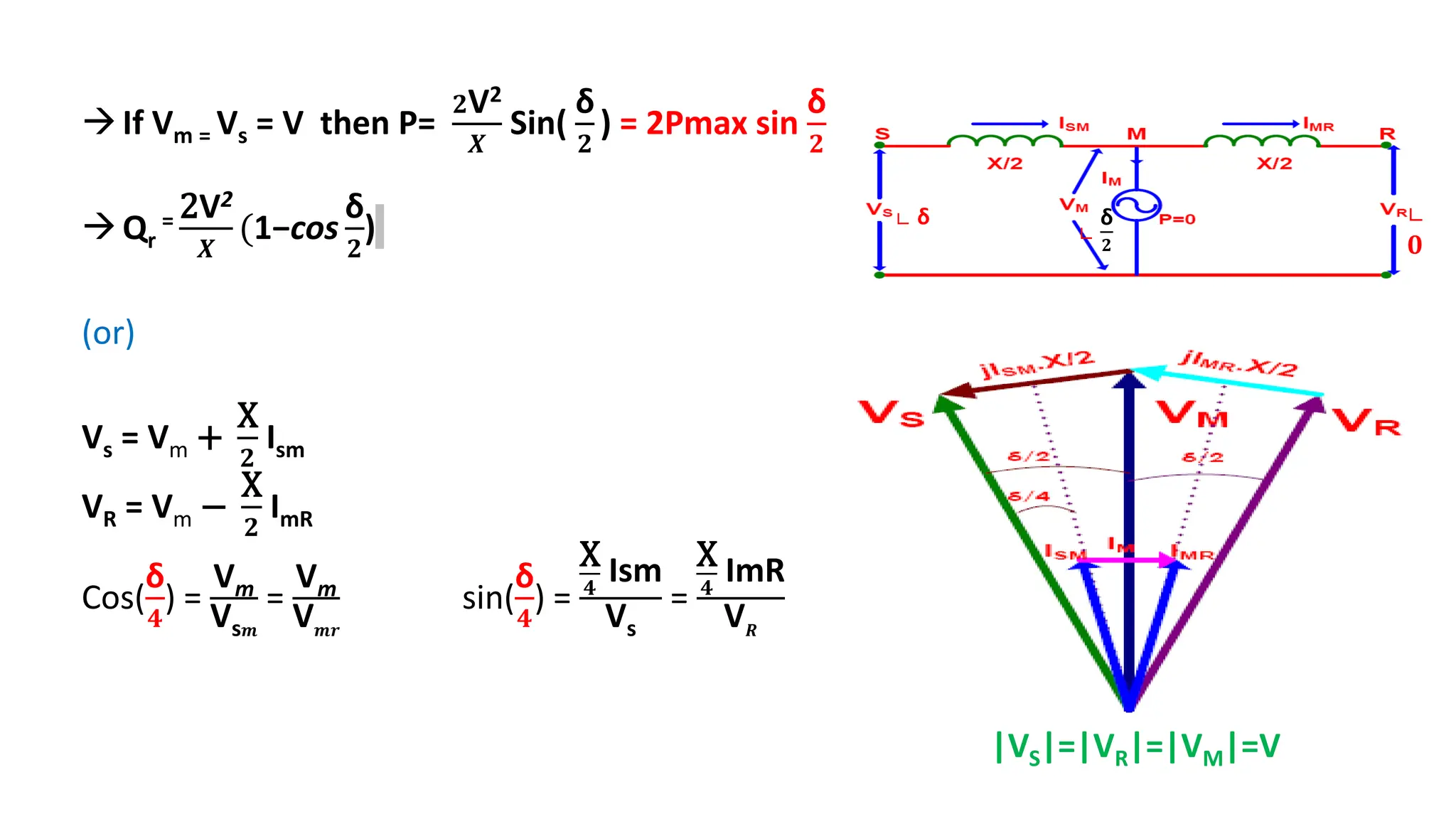
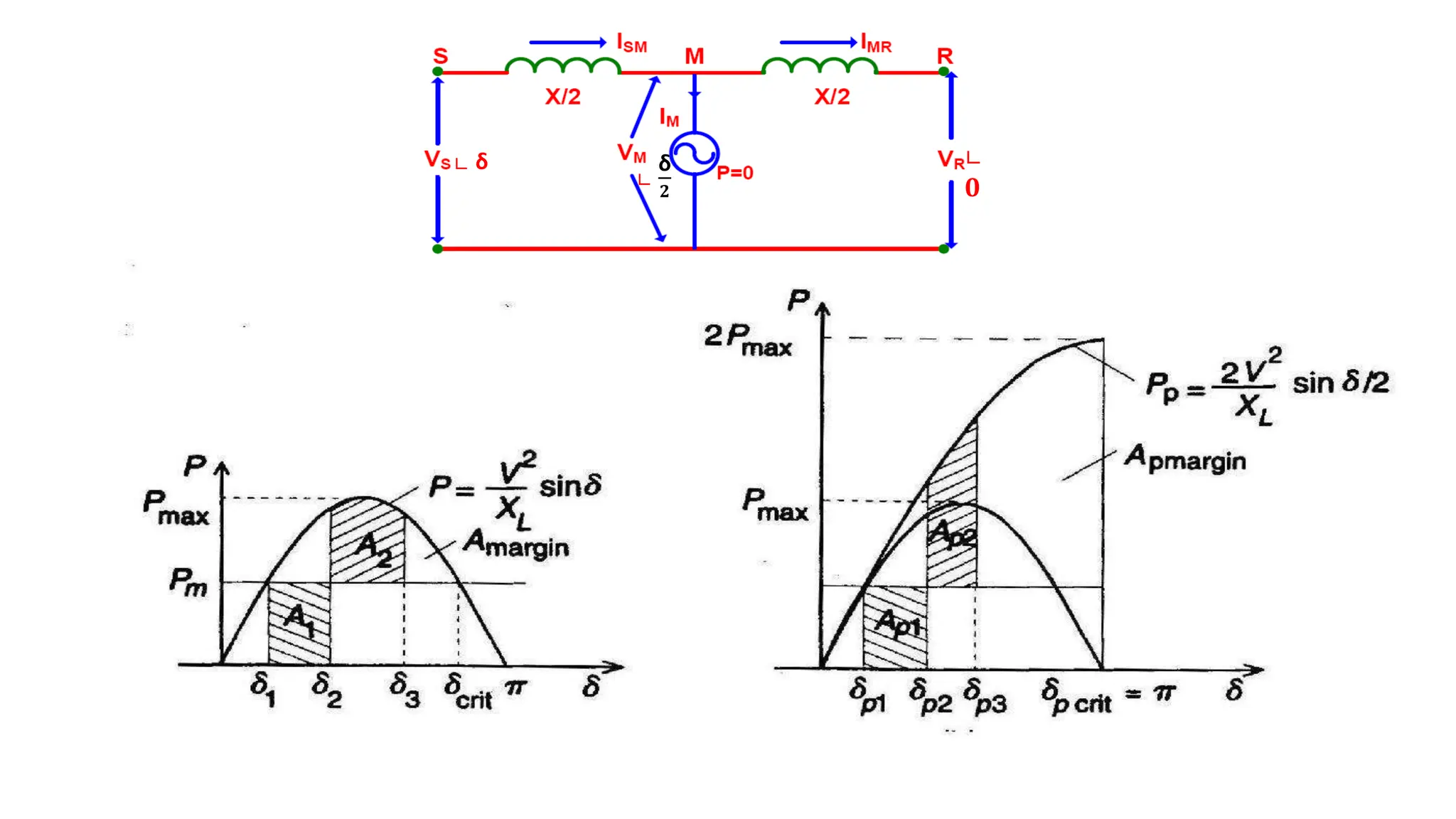
If Vr = Vs = V then P=(V2/X) Sinδ = Pmax sinδ
Qr
= V2
𝑿
(Cosδ − 1)](https://image.slidesharecdn.com/factsunit-3part-1-240123063527-12804297/75/Flexible-Alternating-Transmission-Systems-6-2048.jpg)
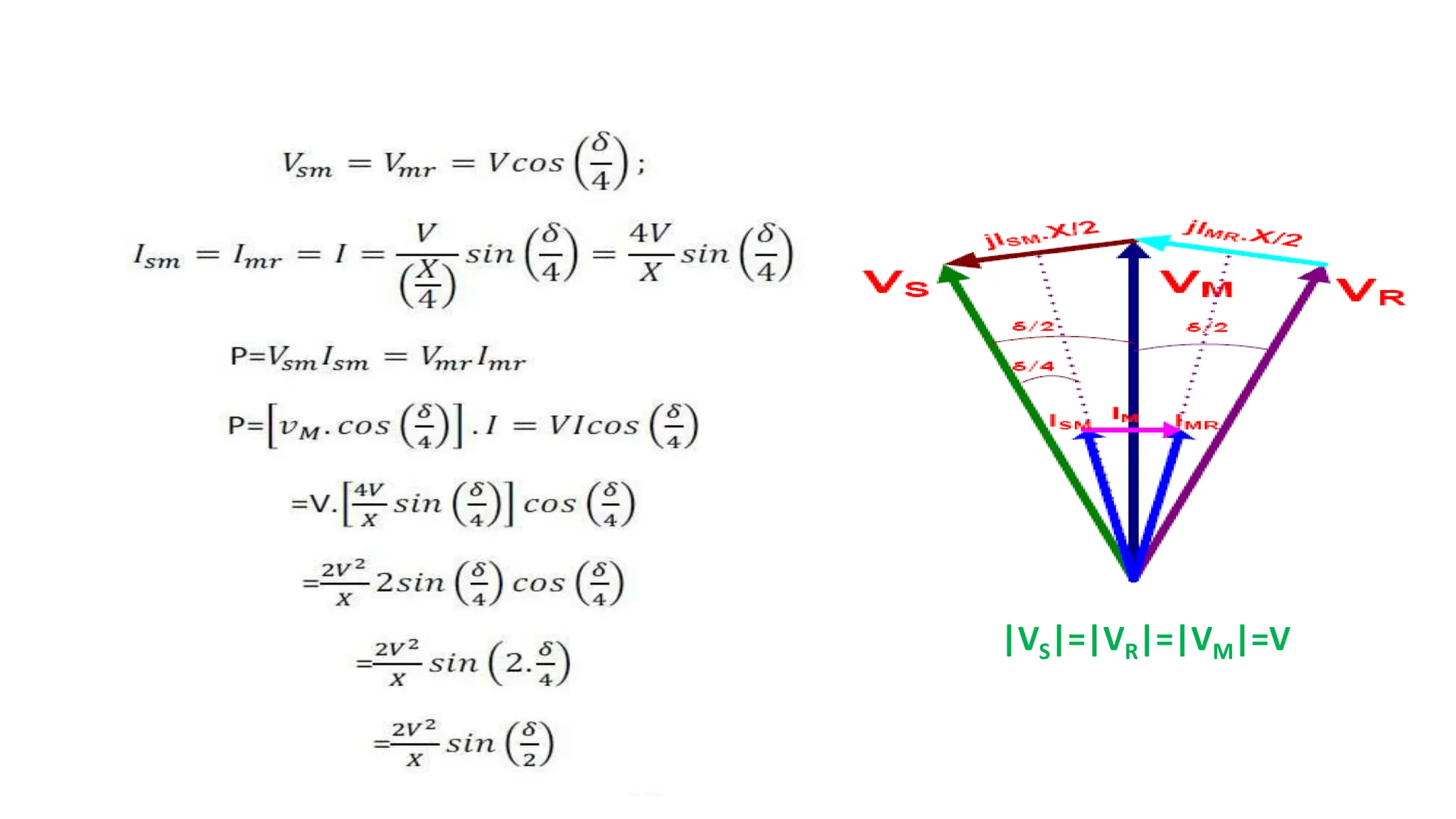
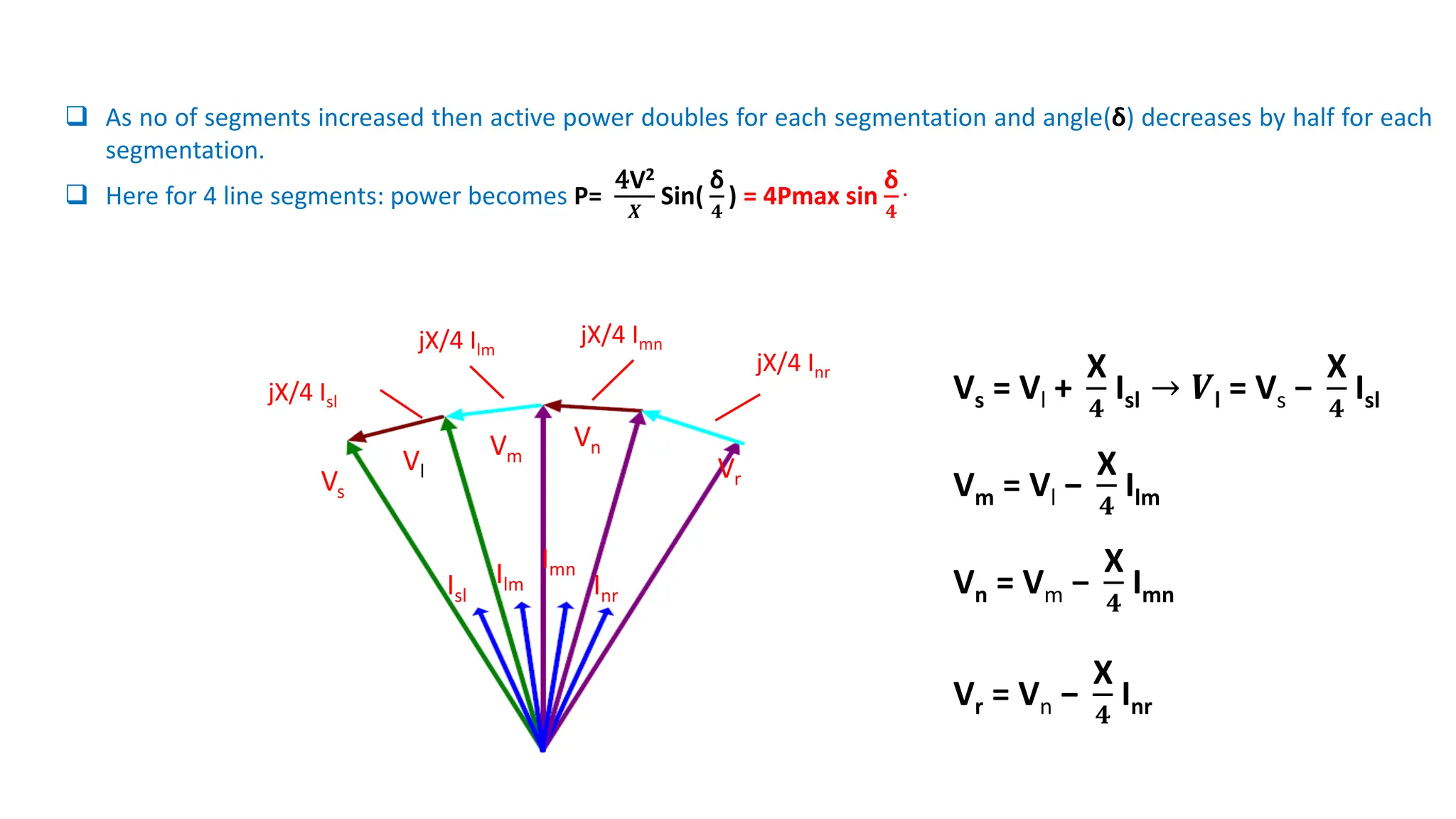
![Sr=Vr Ir* = Vs∟δ [
Vs∟δ − Vm∟δ/𝟐˚
𝒋𝑿/𝟐
]* = Vs∟δ [
Vs∟δ
𝒋𝑿/𝟐
−
V̊m∟δ/𝟐
𝒋𝑿/𝟐
]*
= Vs∟δ [
Vs∟(δ−𝟗𝟎)
𝑿/𝟐
−
Vm∟(δ
𝟐
−𝟗𝟎)
𝑿/𝟐
]* = Vs∟δ [
Vs∟(90−δ)
𝑿/𝟐
−
Vm∟(90−δ
𝟐
)
𝑿
𝟐
]
=
Vs
2∟(90−δ+δ)
𝑿/𝟐
−
VmVs∟(90−δ
𝟐
+δ)
𝑿
𝟐
=
Vs
2∟(𝟗𝟎)
𝑿/𝟐
−
VmVs∟(90+δ
𝟐
)
𝑿
𝟐
Pr =
Vs
2cos(𝟗𝟎)
𝑿/𝟐
−
VmVscos(90+δ
𝟐
)
𝑿
𝟐
=−
VmVs(−𝐬𝐢𝐧
δ
𝟐
)
𝑿
𝟐
=
2VmVs𝒔𝒊𝒏
δ
𝟐
𝑿
Qr =
Vs
2sin(𝟗𝟎)
𝑿/𝟐
−
VmVssin(90+δ
𝟐
)
𝑿
𝟐
=
𝟐Vs
2
𝑿
−
2VmVscosδ
𝟐
𝑿
=
2Vs
𝑿
(Vs − Vmcos
δ
𝟐
).](https://image.slidesharecdn.com/factsunit-3part-1-240123063527-12804297/75/Flexible-Alternating-Transmission-Systems-10-2048.jpg)