Introduction
• Food andfeeding are the important elements for
growth of fish.
• An automatic fish feeder is an electronic device
that is designed to feed fish at regular intervals.
• This project aim to design a fish feeder system
using Arduino.
• and also to monitor water quality using
various sensors
4.
OBJECTIVE
The objective ofthis project is
To design and fabricate fish feeder system.
To enable fish owner to customize feeding time
to check water quality
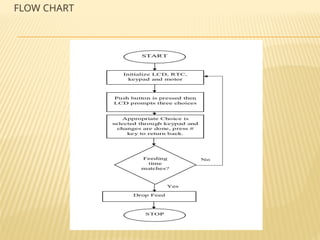
WORKING
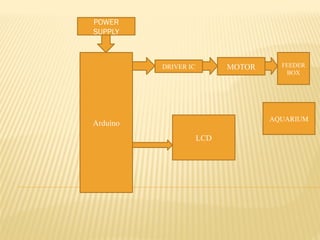
The supplyof power to the board initializes all the hardware
components and LCD displays the welcome message.
In order to set the times for feeding fishes the push button is
pressed. After pressing the push button the LCD prompts three
choices
1.Start date
2.Dose details
3.Change Time & Date.
The appropriate choice is selected by the owner with the help of
4*4 keypad
The controller turns on the DC motor to drop the food into the
aquarium if the time is matched with the set time.
11.
We dothe work by following steps
Firstly, we connect Arduino with pc
Then connect those component with IOT server
Connect all sensor with Arduino and Ethernet shild
Then connect Ethernet shild with Arduino
Then connect those component with IOT server
Then make a website and android app and connect IOT server with
app and website by Rest-Api.
Analyze those data and classify by a given algorithm
Analysis and compare previous and continuous data and take
decision.
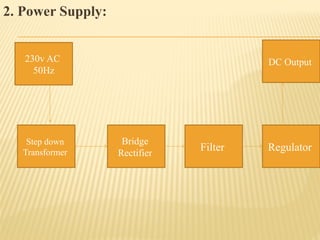
2. Power Supply:
230vAC
50Hz
Step down
Transformer Filter
Bridge
Rectifier
Regulator
DC Output
14.
SENSOR
temperature ofwater will be monitored using
lm35
odur of water will be monitored using mq2
dissolved solids using tds sensor
light using ldr sensor
water recycle using motor
15.
3. DC motor
•ADC motor is any of a class of rotatory
electrical machines that converts direct current
electrical energy to mechanical energy
•It works on the principle of electromagnetism
16.
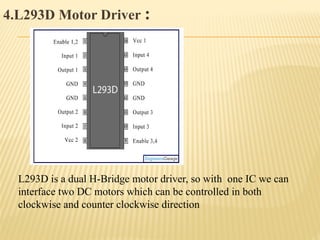
4.L293D Motor Driver:
L293D is a dual H-Bridge motor driver, so with one IC we can
interface two DC motors which can be controlled in both
clockwise and counter clockwise direction
Advantages
Real timemonitiring.
Avoids food starvation and overfeeding
The fishes can be feed even when the owner
forgets to do so.
20.
DISADVANTAGES
This systemcan disperse dry food only.
This system is limited to domestic use only and
unable to function if there are no electricity or
the system is offline.
21.
CONCLUSION
The raspberrypi based fish feeder system is
designed to overcome the problem of fish dying due
to fish feeder malfunction
This to ensure that the user will not comeback to
dead fishes because they unable to check their tank
status.
22.
REFERENCES
[1] WFang and C.M Chang. “Development of an automatic feeder with
thecapability of knowing when to stop feeding”.Proceedings of the
AnnualInternational Conference and Exposition of the World
Aquaculturesociety, Australia, 26 April–2 May, 251, 1991.
[2] K. Barringtom. “History of Fish Keeping As A
Hobby.”www.ratemyfishtank.com. 2013, December 24.
[3] M.Z Noor, A.K Hussian, M.F.Saaid, M.S. Ali, & M Zolkapli.“Thedesign
and development of automatic fish feeder system using
PICmicrocontroller”.IEEE Control and System Graduate
ResearchColloquium. , 2012, pp. 343-347.
[4] M.N. Uddin, M Rashid, M. Mostafa, H. Belayet, S.Salam, N.Nithe,
M.Rahman, &A.Aziz.“Development of Automatic Fish Feeder”.
GlobalJournal of Researches in Engineering: A Mechanical and
MechanicsEngineering. Vol.16 (2), 2016, pp. 14-24.
23.
References
[1]World health Organaization ”chapter 8, chemical aspects”
[2] Layth Y. Qasim1*, Wafa K. Essa2, Luay M. Qasim “ Estimate and classify the
hardness of different water surces by using
prepared soup solution ”, ISSN 2224- 3224 (Print) ISSN 2225- 0956 (Online) Vol.6
No.1, 2014
[3] Ruth Francis-Floyd2, “ Dissolved Oxygen for Fish Production1” university of florida ,
Extension institute of food and agricultural
science.
[4] J. Clerk Maxwell, A Treatise on Electricity and Magnetism, 3rd ed., vol. 2. Oxford:
Clarendon, 1892, pp.68-73.
[5] I.S. Jacobs and C.P. Bean, “Fine particles, thin films and exchange anisotropy,” in
Magnetism, vol. III, G.T. Rado and H. Suhl,
Eds. New York: Academic, 1963, pp. 271-350.

![REFERENCES
[1] W Fang and C.M Chang. “Development of an automatic feeder with
thecapability of knowing when to stop feeding”.Proceedings of the
AnnualInternational Conference and Exposition of the World
Aquaculturesociety, Australia, 26 April–2 May, 251, 1991.
[2] K. Barringtom. “History of Fish Keeping As A
Hobby.”www.ratemyfishtank.com. 2013, December 24.
[3] M.Z Noor, A.K Hussian, M.F.Saaid, M.S. Ali, & M Zolkapli.“Thedesign
and development of automatic fish feeder system using
PICmicrocontroller”.IEEE Control and System Graduate
ResearchColloquium. , 2012, pp. 343-347.
[4] M.N. Uddin, M Rashid, M. Mostafa, H. Belayet, S.Salam, N.Nithe,
M.Rahman, &A.Aziz.“Development of Automatic Fish Feeder”.
GlobalJournal of Researches in Engineering: A Mechanical and
MechanicsEngineering. Vol.16 (2), 2016, pp. 14-24.](https://image.slidesharecdn.com/fishfeederppt-250527055832-0d884dca/85/fish-feeder-ppt-using-arduino-and-microcontroller-22-320.jpg)
![ References
[1] World health Organaization ”chapter 8, chemical aspects”
[2] Layth Y. Qasim1*, Wafa K. Essa2, Luay M. Qasim “ Estimate and classify the
hardness of different water surces by using
prepared soup solution ”, ISSN 2224- 3224 (Print) ISSN 2225- 0956 (Online) Vol.6
No.1, 2014
[3] Ruth Francis-Floyd2, “ Dissolved Oxygen for Fish Production1” university of florida ,
Extension institute of food and agricultural
science.
[4] J. Clerk Maxwell, A Treatise on Electricity and Magnetism, 3rd ed., vol. 2. Oxford:
Clarendon, 1892, pp.68-73.
[5] I.S. Jacobs and C.P. Bean, “Fine particles, thin films and exchange anisotropy,” in
Magnetism, vol. III, G.T. Rado and H. Suhl,
Eds. New York: Academic, 1963, pp. 271-350.](https://image.slidesharecdn.com/fishfeederppt-250527055832-0d884dca/85/fish-feeder-ppt-using-arduino-and-microcontroller-23-320.jpg)