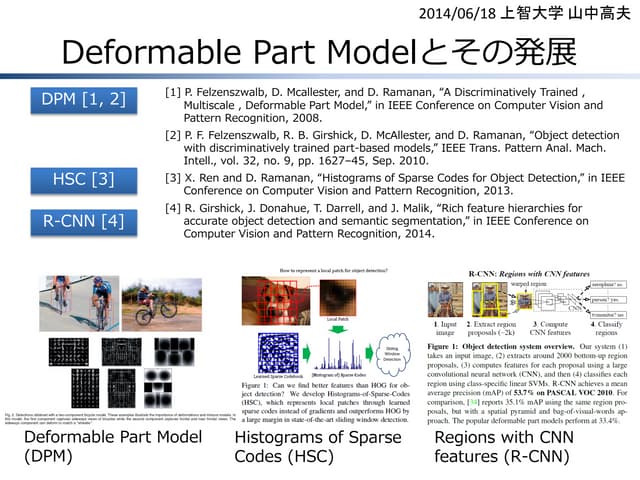
Introduction
Object Proposal Methods
Conclusions
文献リスト:Fast Object Proposal Methods
[1] J. Hosang, R. Benenson, and B. Schiele, “How good are
detection proposals, really?,” British Machine Vision Conference,
2014.
[2] M.-M. Cheng, Z. Zhang, W.-Y. Lin, and P. Torr, “BING:
Binarized Normed Gradients for Objectness Estimation at 300fps,”
IEEE Conference on Computer Vision and Pattern Recognition,
2014.
[3] Q. Zhao, Z. Liu, and B. Yin, “Cracking BING and Beyond,”
British Machine Vision Conference, 2014.
[4] C. L. Zitnick and P. Dollar, “Edge Boxes: Locating Object
Proposals from Edges,” European Conference on Computer Vision,
2014.
2015/11/06 上智大学 山中高夫 Fast Object Proposal Methods

![Introduction
Object Proposal Methods
Conclusions
文献リスト: Fast Object Proposal Methods
[1] J. Hosang, R. Benenson, and B. Schiele, “How good are
detection proposals, really?,” British Machine Vision Conference,
2014.
[2] M.-M. Cheng, Z. Zhang, W.-Y. Lin, and P. Torr, “BING:
Binarized Normed Gradients for Objectness Estimation at 300fps,”
IEEE Conference on Computer Vision and Pattern Recognition,
2014.
[3] Q. Zhao, Z. Liu, and B. Yin, “Cracking BING and Beyond,”
British Machine Vision Conference, 2014.
[4] C. L. Zitnick and P. Dollar, “Edge Boxes: Locating Object
Proposals from Edges,” European Conference on Computer Vision,
2014.
2015/11/06 上智大学 山中高夫 Fast Object Proposal Methods](https://image.slidesharecdn.com/20151106fastobjectproposalmethods-151106071854-lva1-app6891/85/Fast-Object-Proposal-Methods-2-320.jpg)

![Introduction
Object Proposal Methods
Conclusions
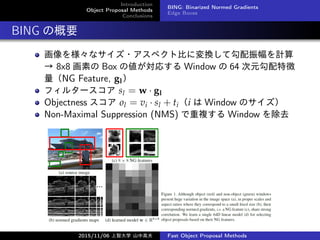
本発表の目的
目的
Object Proposal Methods の中で
も,リアルタイム処理に適した
BING[Cheng, CVPR2014] と
Edge Boxes[Zitnick, ECCV2014]
の手法を紹介する
adapted from [Hosang, BMVC2014]
2015/11/06 上智大学 山中高夫 Fast Object Proposal Methods](https://image.slidesharecdn.com/20151106fastobjectproposalmethods-151106071854-lva1-app6891/85/Fast-Object-Proposal-Methods-4-320.jpg)
![Introduction
Object Proposal Methods
Conclusions
BING: Binarized Normed Gradients
Edge Boxes
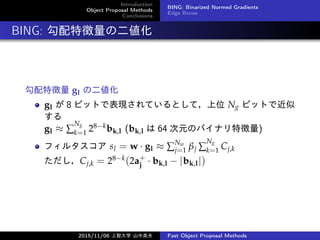
BING: フィルタ係数の二値化
w の二値化
w ≈ ∑
Nw
j=1 βjaj (aj ∈ {−1, 1}64, βj ∈ ℜ)
aj = a+
j − a+
j (a+
j ∈ {0, 1}64)
b ∈ {0, 1}64 とすると,w · b ≈ ∑
Nw
j=1 βj(2a+
j · b − |b|)
[28] Hare, Saffari & Torr, "Efficient online structured output learning for
keypoint-based object tracking," CVPR2012
2015/11/06 上智大学 山中高夫 Fast Object Proposal Methods](https://image.slidesharecdn.com/20151106fastobjectproposalmethods-151106071854-lva1-app6891/85/Fast-Object-Proposal-Methods-8-320.jpg)
![Introduction
Object Proposal Methods
Conclusions
BING: Binarized Normed Gradients
Edge Boxes
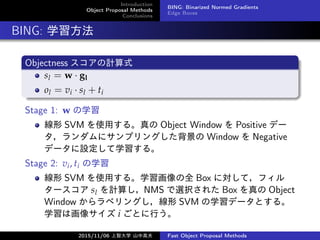
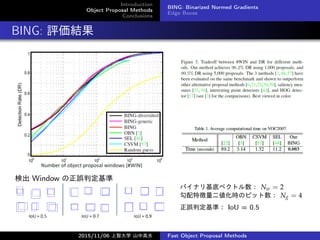
Edge Boxes: 手法 (2)
wb(si) の計算
Bounding Box b に対して,その中に含まれる全てのエッジグ
ループ si に wb(si) ∈ [0, 1] を割り当てる。
- si が Bounding Box に完全に含まれる場合 · · · wb(si) = 1
- 外にある場合や境界につながっている場合 · · · wb(si) = 0
境界につながっているエッジグループの集合を Sb とし,
si ∈ Sb のエッジに対して wb(si) = 0 に設定する。
それ以外の si に対して,以下の式で wb(si) を計算する。
wb(si) = 1 − maxT ∏
|T|−1
j a(tj, tj+1)
ただし,t1 ∈ Sb, t|T| = si
つまり,上式は si から境界までの最大 affinity になる経路で計
算する。
境界につながる経路がない場合は wb(si) = 1 である。
2015/11/06 上智大学 山中高夫 Fast Object Proposal Methods](https://image.slidesharecdn.com/20151106fastobjectproposalmethods-151106071854-lva1-app6891/85/Fast-Object-Proposal-Methods-15-320.jpg)
![Introduction
Object Proposal Methods
Conclusions
まとめ
Object Proposal は,物体検出などより
複雑な認識処理の前処理として使用さ
れることが想定されているので,でき
る限り高速な処理が望まれる
BING や Edge Boxes は非常に高速な処
理が可能であり,1 枚の処理にかかる
時間は BING が 0.2s,Edge Boxes が
0.3s である
特に Edge Boxes は高速で精度も高い
ことが報告されている [Hosang,
BMVC2014] ので,様々なアプリケー
ションに応用が期待できる。 adapted from [Hosang,
BMVC2014]
2015/11/06 上智大学 山中高夫 Fast Object Proposal Methods](https://image.slidesharecdn.com/20151106fastobjectproposalmethods-151106071854-lva1-app6891/85/Fast-Object-Proposal-Methods-22-320.jpg)










![[DL輪読会]Neural Radiance Flow for 4D View Synthesis and Video Processing (NeRF...](https://cdn.slidesharecdn.com/ss_thumbnails/20210806journalclub-210806023711-thumbnail.jpg?width=640&height=640&fit=bounds)

![[DL輪読会]Model soups: averaging weights of multiple fine-tuned models improves ...](https://cdn.slidesharecdn.com/ss_thumbnails/dl0401-220405031053-thumbnail.jpg?width=640&height=640&fit=bounds)

![[DL輪読会]A Higher-Dimensional Representation for Topologically Varying Neural R...](https://cdn.slidesharecdn.com/ss_thumbnails/ahigher-dimensionalrepresentationfortopologicallyvaryingneuralradiancefields1-210924021911-thumbnail.jpg?width=640&height=640&fit=bounds)





![SSII2022 [SS2] 少ないデータやラベルを効率的に活用する機械学習技術 〜 足りない情報をどのように補うか?〜](https://cdn.slidesharecdn.com/ss_thumbnails/ss2ssii2022-220607054716-2760bd30-thumbnail.jpg?width=640&height=640&fit=bounds)
![[DL輪読会]Vision Transformer with Deformable Attention (Deformable Attention Tra...](https://cdn.slidesharecdn.com/ss_thumbnails/dl0114-220114032933-thumbnail.jpg?width=640&height=640&fit=bounds)



![SSII2020 [OS2-02] 教師あり事前学習を凌駕する「弱」教師あり事前学習](https://cdn.slidesharecdn.com/ss_thumbnails/200611ssii2020os2weaksupervision-200609142553-thumbnail.jpg?width=640&height=640&fit=bounds)




















![[CVPR読み会]BING:Binarized normed gradients for objectness estimation at 300fps](https://cdn.slidesharecdn.com/ss_thumbnails/bing-140725194514-phpapp02-thumbnail.jpg?width=640&height=640&fit=bounds)











![[DL Hacks] Objects as Points](https://cdn.slidesharecdn.com/ss_thumbnails/centernetpub-190627053219-thumbnail.jpg?width=640&height=640&fit=bounds)

