Download to read offline
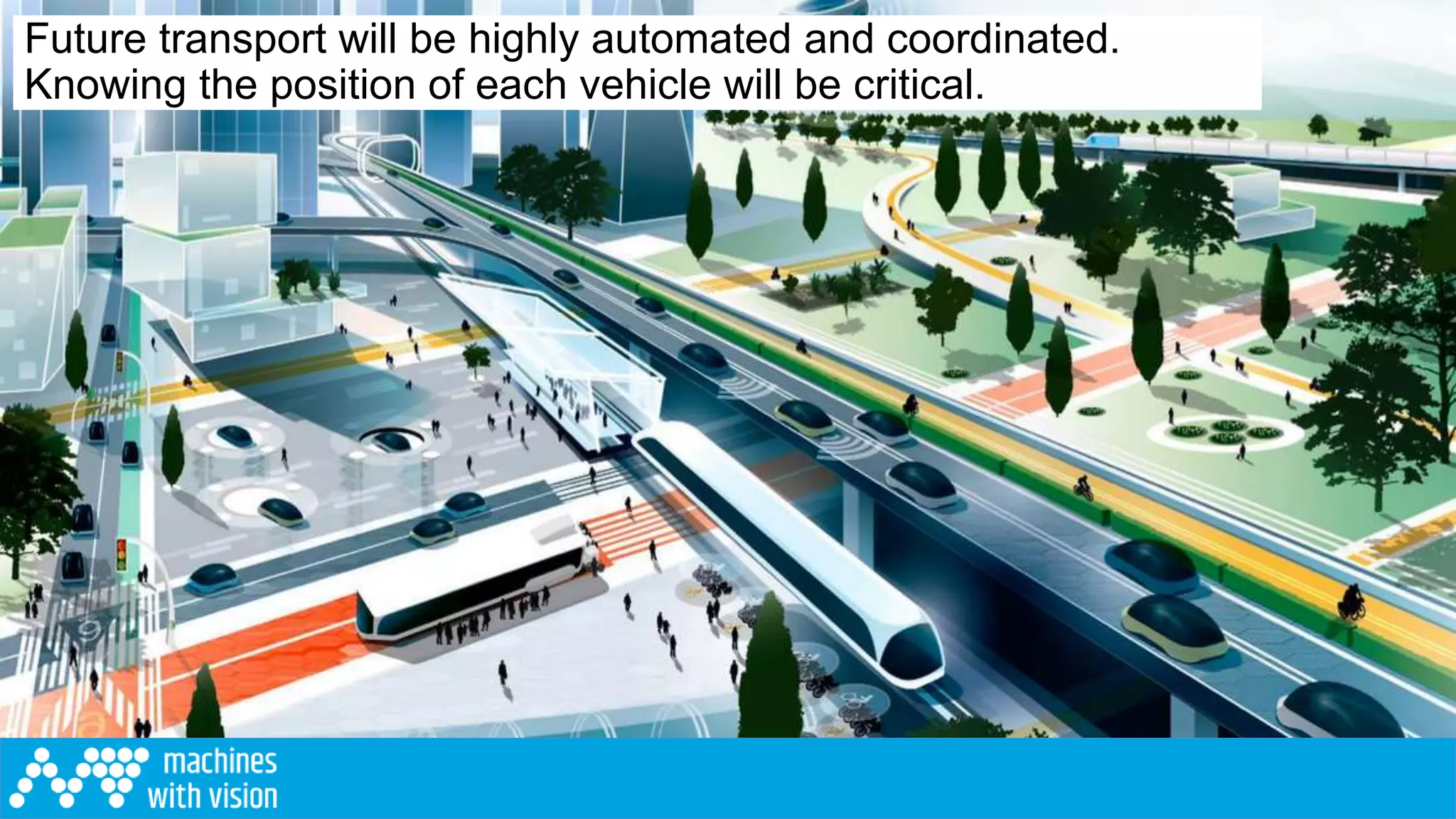
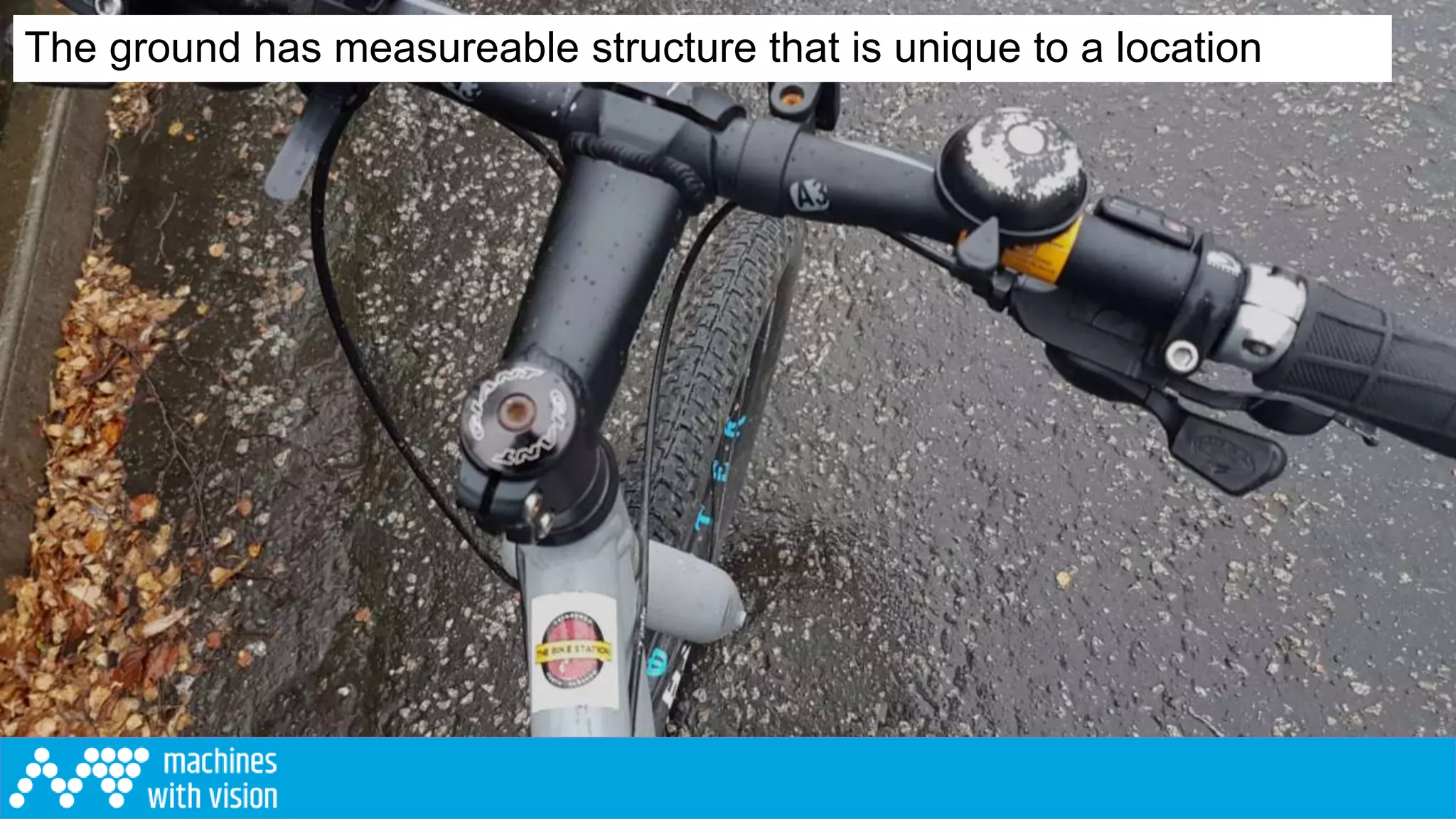
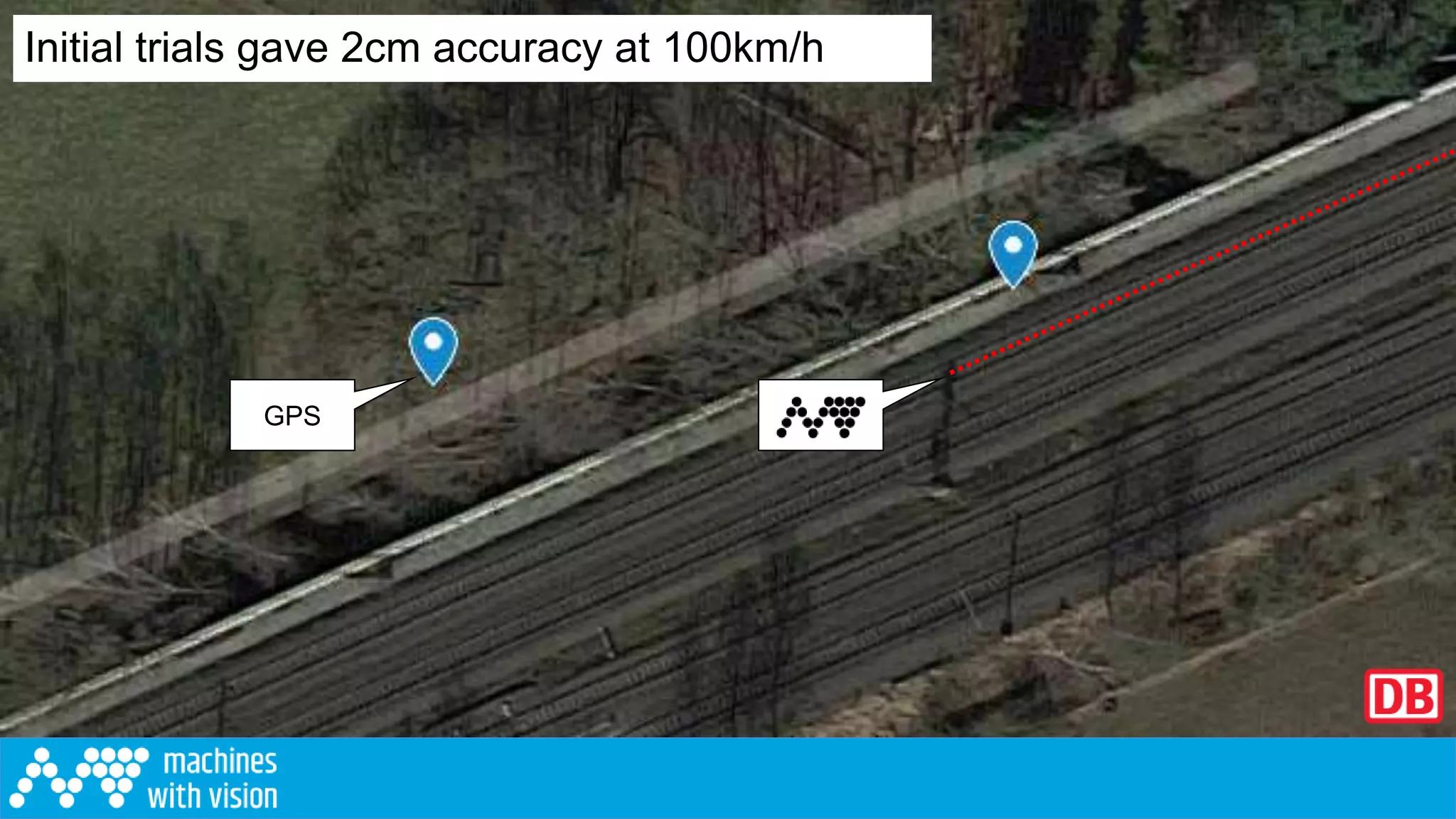
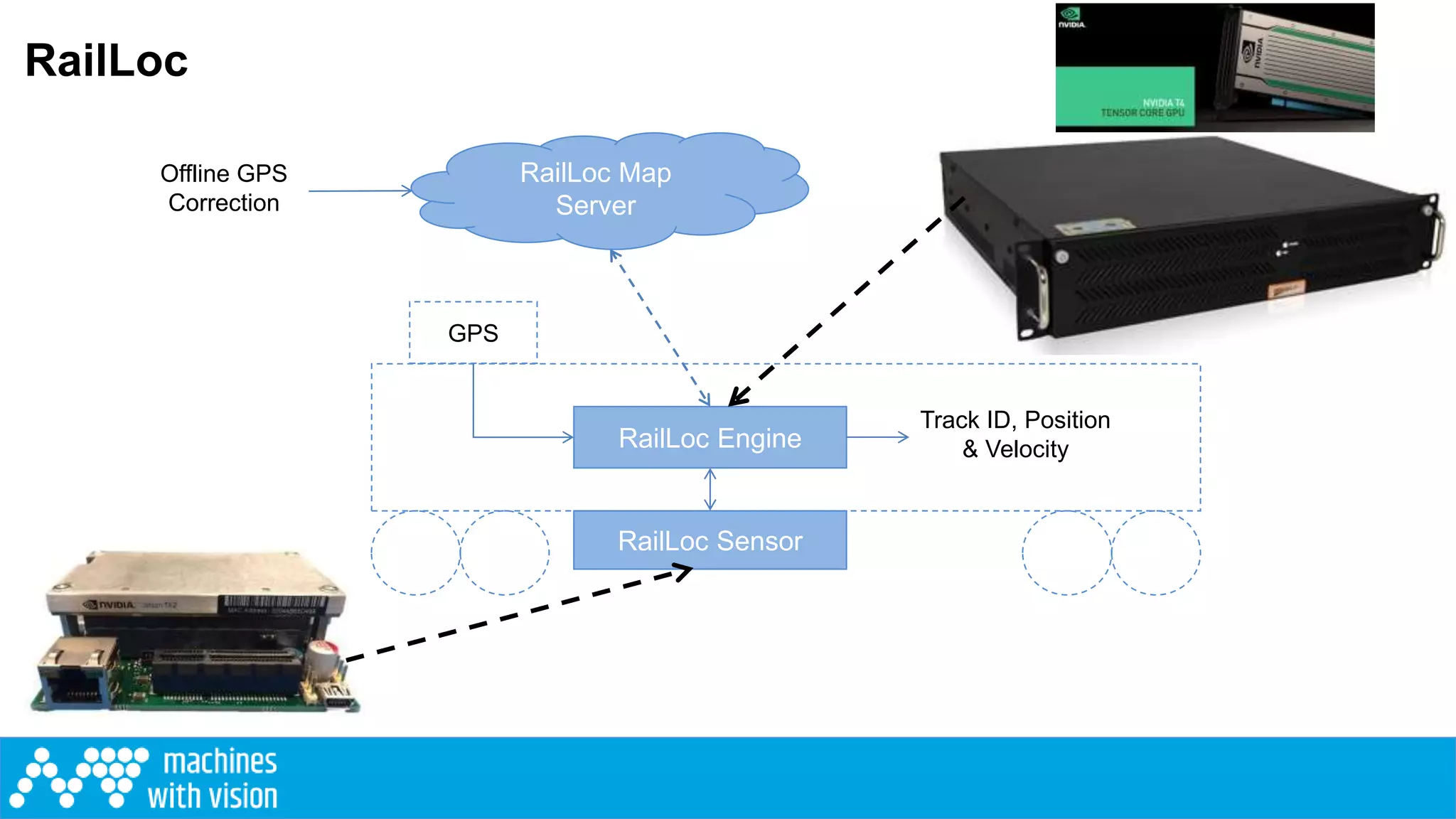
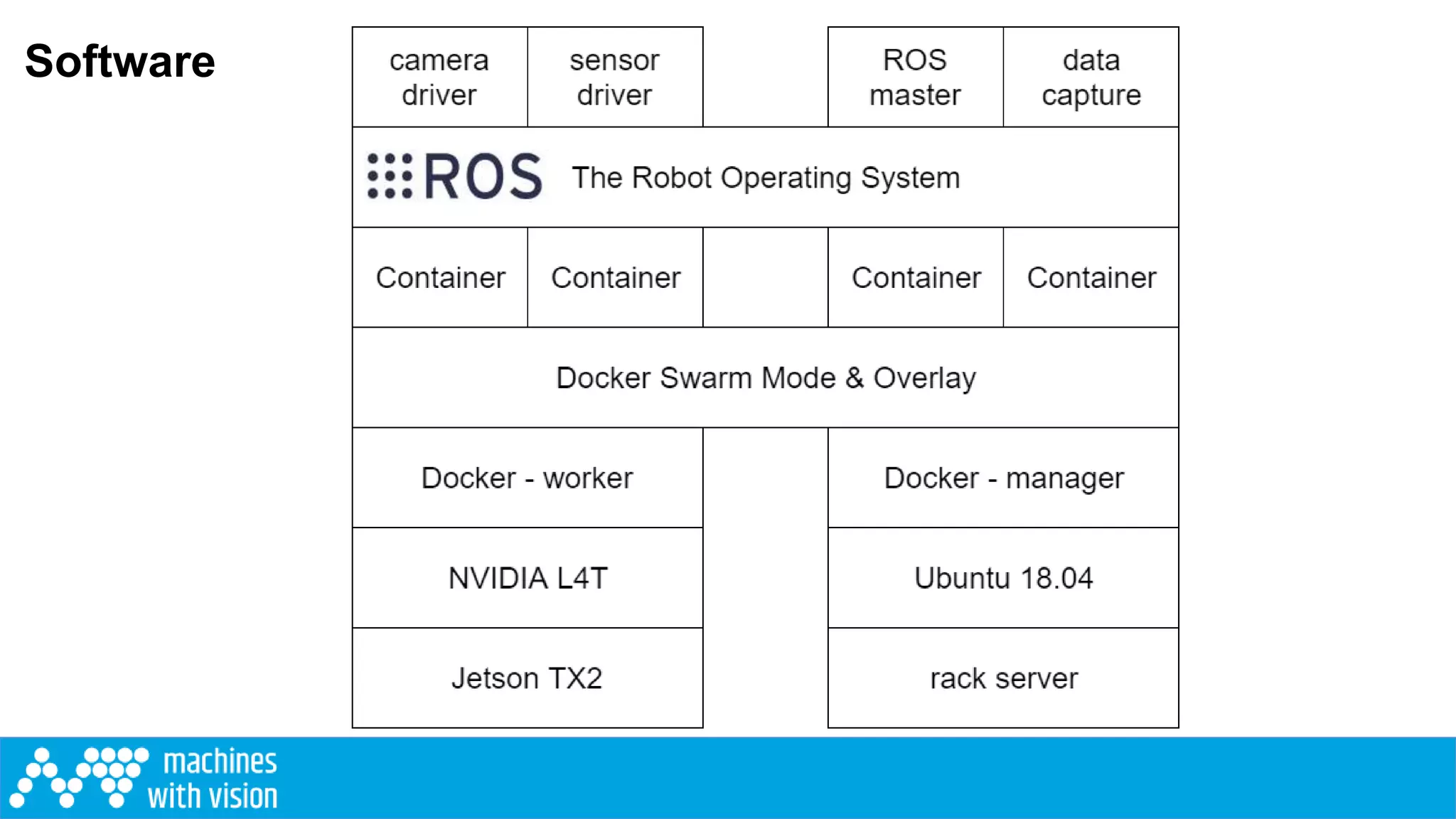


Geoff Ballinger discusses the future of automated transport systems that require accurate vehicle positioning, highlighting a trial that achieved 2cm GPS accuracy at 100km/h. He explains the challenges faced in deploying a Docker and Swarm environment, including limited access and a multi-architecture setup. Ballinger concludes by mentioning hiring opportunities for CUDA developers and software engineers.




![[En] IPVS for Docker Containers](https://cdn.slidesharecdn.com/ss_thumbnails/ipvsdockerconeu2015-fullversion-151119045345-lva1-app6892-thumbnail.jpg?width=640&height=640&fit=bounds)