Downloaded 28 times
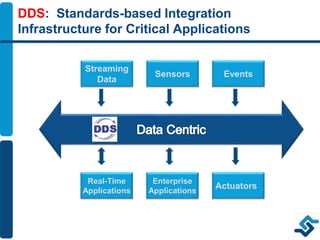
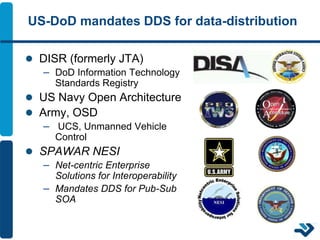
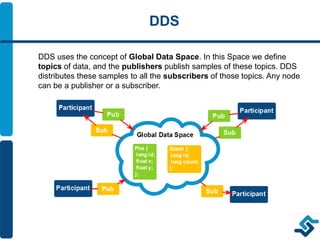
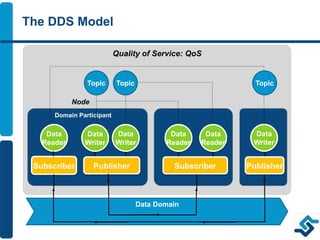
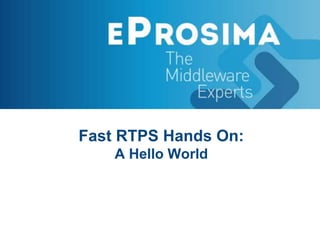
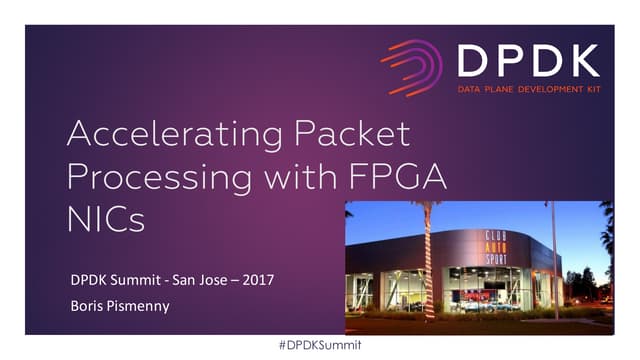
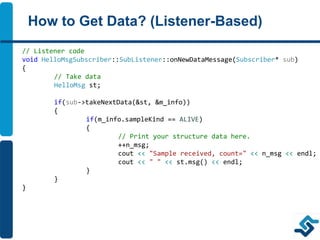
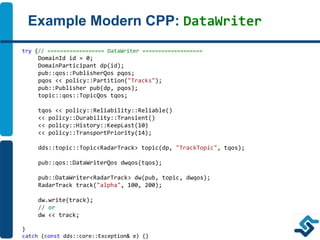
![Generate type support (for C++) [Windows]
Look at the directory you should see:
– solution-x64Win64VS2015.sln
– And Several other files…
Open the Solution:
Compile from visual studio
fastrtpsgen HelloMsg.idl -example x64Win64VS2015
-replace -ppDisable](https://image.slidesharecdn.com/20161123ddsusingcpp-161125101643/85/Distributed-Systems-How-to-connect-your-real-time-applications-26-320.jpg)
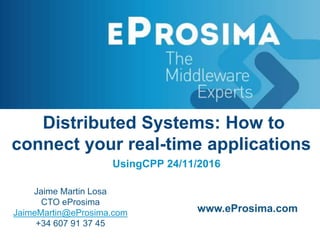
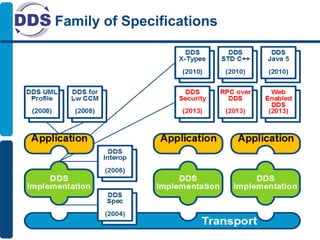
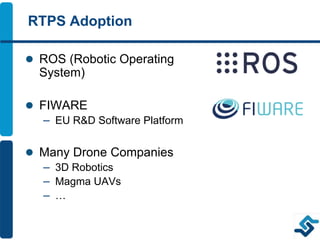
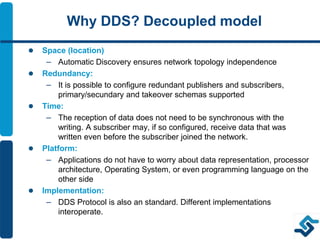
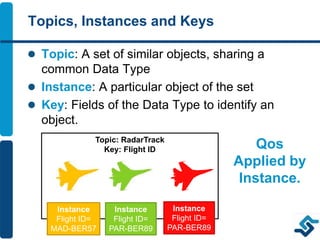
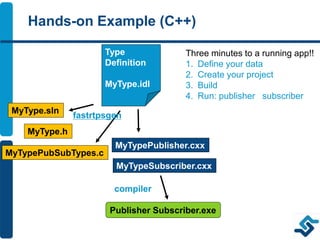
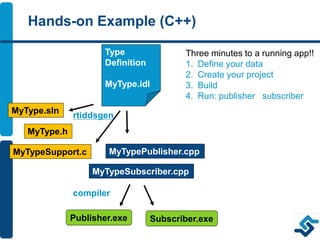
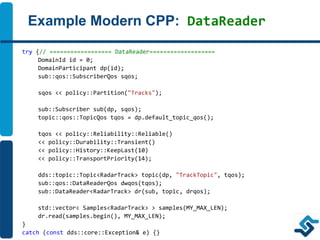
![Execute the program [Windows]
C++:
– On one window run:
binx64Win64VS2015HelloMsgPublisherSubscriberd.exe publisher
– On another window run:
binx64Win64VS2015HelloMsgPublisherSubscriberd.exe subscriber
You should see the subscribers getting an empty string…](https://image.slidesharecdn.com/20161123ddsusingcpp-161125101643/85/Distributed-Systems-How-to-connect-your-real-time-applications-27-320.jpg)

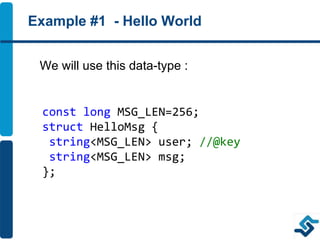
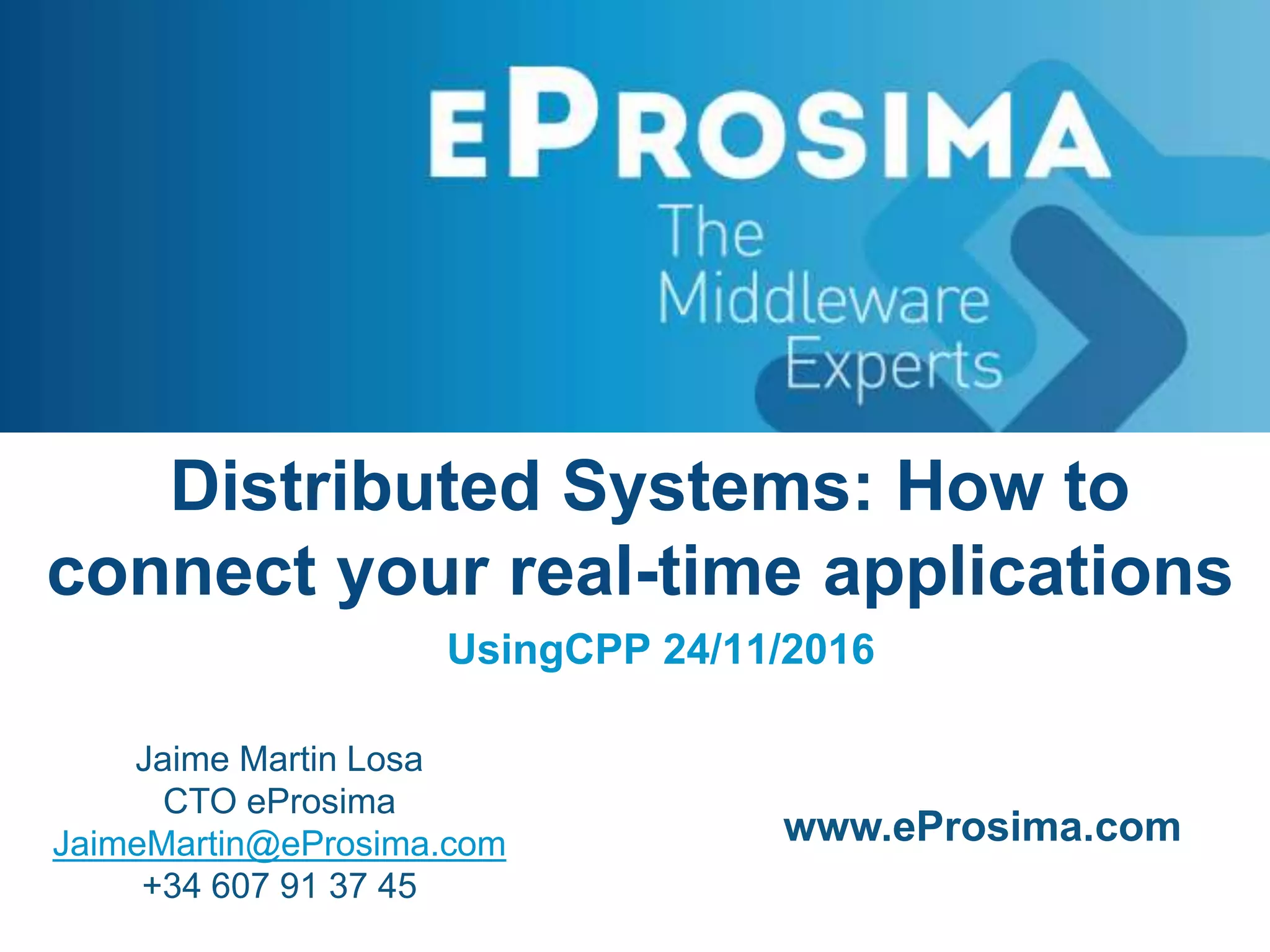
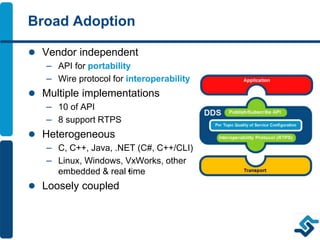
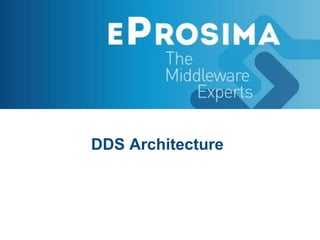
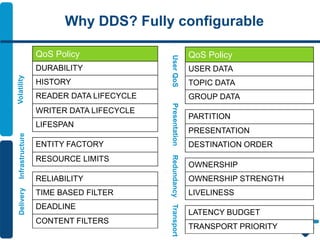
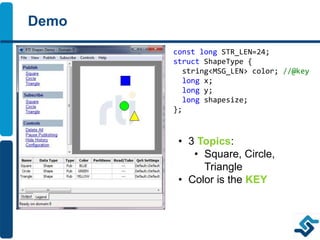
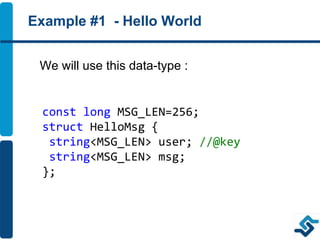
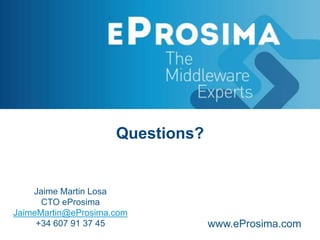
![Generate type support (for C++) [Windows]
Look at the directory you should see:
– HelloMsg-64-vs2010.sln
– And Several other files…
Open the Solution:
HelloMsgPublisher.cxx
Compile from visual studio
rtiddsgen HelloMsg.idl -language C++ -example x64Win64VS2010
-replace -ppDisable](https://image.slidesharecdn.com/20161123ddsusingcpp-161125101643/85/Distributed-Systems-How-to-connect-your-real-time-applications-33-320.jpg)
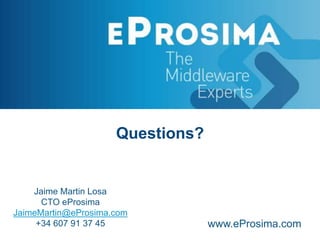
![Execute the program [Windows]
C++:
– On one window run:
objsi86Win32VS2005HelloMsgPublisher.exe
– On another window run:
objsi86Win32VS2005HelloMsgSubscriber.exe
Java
– On one window run:
gmake –f makefile_hello_i86Win32jdk HelloMsgPublisher
– On another window run:
gmake –f makefile_hello_i86Win32jdk HelloMsgSubscriber
You should see the subscribers getting an empty string…](https://image.slidesharecdn.com/20161123ddsusingcpp-161125101643/85/Distributed-Systems-How-to-connect-your-real-time-applications-34-320.jpg)
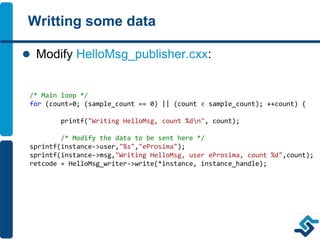
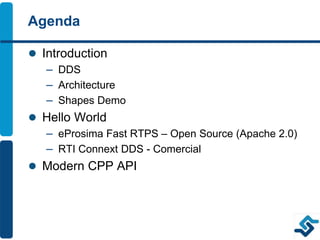
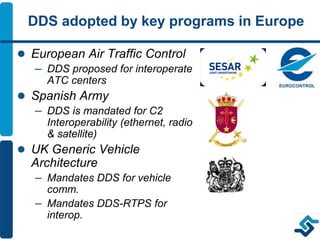
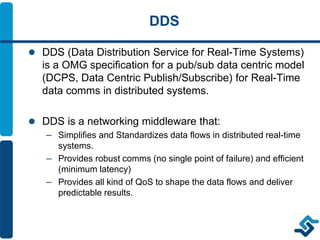
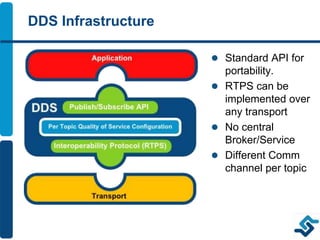
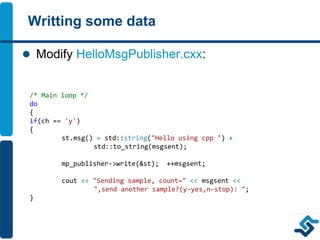
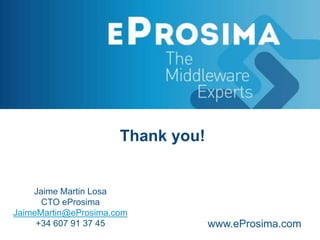
![How to Get Data? (Listener-Based)
// Listener code
MyListener::on_data_available( DataReader reader )
{
MyTypeSeq received_data;
SampleInfoSeq sample_info;
MyTypeDataReader treader = TextDataReader::narrow(reader);
treader->take( &received_data, &sample_info, …)
// Use received_data
printf("Got: %sn", received_data[0]->contents);
}](https://image.slidesharecdn.com/20161123ddsusingcpp-161125101643/85/Distributed-Systems-How-to-connect-your-real-time-applications-39-320.jpg)



This document provides an overview of distributed systems and how to connect real-time applications using the Data Distribution Service (DDS) standard. It introduces DDS and its architecture, including topics, instances, keys, quality of service policies. It then demonstrates how to create a basic "hello world" publisher/subscriber example in both eProsima Fast RTPS and RTI Connext DDS middleware in 3 steps: defining the data type, generating code, and building/running the publisher and subscriber.