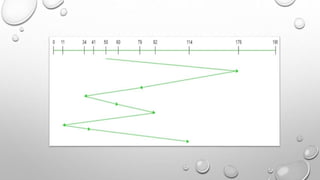
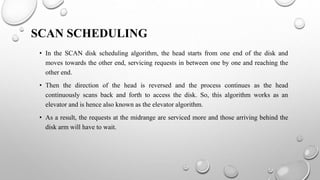
The document discusses various disk scheduling algorithms used in operating systems including FCFS, SCAN, and C-SCAN. It provides descriptions of how each algorithm works along with examples, pseudocode, and discussions of their advantages and disadvantages. FCFS services requests in the order they arrive with no starvation but generally does not provide the fastest service. SCAN works like an elevator moving back and forth to service requests. C-SCAN first services all requests on one side of the disk head position before reversing direction.



![CODE
#Include <iostream>
Using namespace std;
Int size = 8;
Void fcfs(int arr[], int head)
{ I
Nt seek_count = 0;
Int distance, cur_track;
For (int i = 0; i < size; i++)
{
Cur_track = arr[i];
// calculate absolute distance
Distance = abs(cur_track - head);
// Increase the total count
Seek_count += distance;
// Accessed track is now new head
Head = cur_track;
}
Cout << "total number of seek operations = "<<
seek_count << endl;
// Seek sequence would be the same
// As request array sequence
Cout << "seek sequence is" << endl;](https://image.slidesharecdn.com/diskmanagementpresentationofgroupvoperatingsystemlab-230125231922-907c5b35/85/Disk-Management-Presentation-of-Group-V-Operating-System-Lab-pptx-8-320.jpg)
![For (int i = 0; i < size; i++)
{
Cout << arr[i] << endl;
}}
Int main()
{
Int arr[size] = { 176, 79, 34, 60, 92, 11, 41, 114 };
Int head = 50;
Fcfs(arr, head);
Return 0;
}](https://image.slidesharecdn.com/diskmanagementpresentationofgroupvoperatingsystemlab-230125231922-907c5b35/85/Disk-Management-Presentation-of-Group-V-Operating-System-Lab-pptx-9-320.jpg)

![CODE
#Include <iostream>
Using namespace std;
Int main(){
Int i,j,k,n,m,sum=0,x,y,h;
Cout<<"enter the size of diskn";
Cin>>m;
Cout<<"enter number of requestsn";
Cin>>n;
Cout<<"enter the requestsn";
Vector <int> a(n),b;
For(i=0;i<n;i++){
Cin>>a[i];
}
For(i=0;i<n;i++){
If(a[i]>m){
Cout<<"error, unknown position "<<a[i]<<"n";
Return 0;
}}
Cout<<"enter the head positionn";
Cin>>h;
Int temp=h;
A.Push_back(h);
A.Push_back(m);
A.Push_back(0);
Sort(a.Begin(),a.End());](https://image.slidesharecdn.com/diskmanagementpresentationofgroupvoperatingsystemlab-230125231922-907c5b35/85/Disk-Management-Presentation-of-Group-V-Operating-System-Lab-pptx-15-320.jpg)
![For(i=0;i<a.Size();i++){
If(h==a[i])
Break;
}
K=i;
If(k<n/2){
For(i=k;i<a.Size();i++){
B.Push_back(a[i]);
}
For(i=k-1;i>=0;i--){
B.Push_back(a[i]);
}}
Else{
For(i=k;i>=0;i--){
B.Push_back(a[i]);
}
For(i=k+1;i<a.Size();i++){
B.Push_back(a[i]);
}}
Temp=b[0];
Cout<<temp;
For(i=1;i<b.Size();i++){
Cout<<" -> "<<b[i];
Sum+=abs(b[i]-temp);](https://image.slidesharecdn.com/diskmanagementpresentationofgroupvoperatingsystemlab-230125231922-907c5b35/85/Disk-Management-Presentation-of-Group-V-Operating-System-Lab-pptx-16-320.jpg)
![Temp=b[i];
}
Cout<<'n';
Cout<<"total head movements = "<< sum<<'n';
Cout<<"average head movement =
"<<(float)sum/n<<'n';
Return 0;
}](https://image.slidesharecdn.com/diskmanagementpresentationofgroupvoperatingsystemlab-230125231922-907c5b35/85/Disk-Management-Presentation-of-Group-V-Operating-System-Lab-pptx-17-320.jpg)

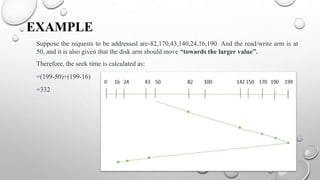
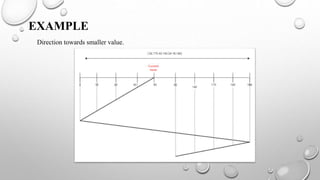
![EXAMPLE
• Let’s consider a disk
with 200 tracks(0-199),
a request queue
containing track
numbers
[82,170,43,140,24,16,1
90], and the current
position of read-write
head=50.
• The requirement is to
find the total number of
track movements in
cylinders.(Direction
towards larger value.)](https://image.slidesharecdn.com/diskmanagementpresentationofgroupvoperatingsystemlab-230125231922-907c5b35/85/Disk-Management-Presentation-of-Group-V-Operating-System-Lab-pptx-20-320.jpg)
![CODE
#Include <iostream>
Using namespace std;
Int size = 8;
Int disk_size = 200;
Void cscan(int arr[], int head)
{
Int seek_count = 0;
Int distance, cur_track;
Vector<int> left, right;
Vector<int> seek_sequence;
// Appending end values
// Which has to be visited
// Before reversing the direction
Left.Push_back(0);
Right.Push_back(disk_size - 1);
// Tracks on the left of the
// Head will be serviced when
// Once the head comes back
// To the beginning (left end).
For (int i = 0; i < size; i++) {
if (arr[i] < head)
Left.Push_back(arr[i]);](https://image.slidesharecdn.com/diskmanagementpresentationofgroupvoperatingsystemlab-230125231922-907c5b35/85/Disk-Management-Presentation-of-Group-V-Operating-System-Lab-pptx-22-320.jpg)
![If (arr[i] > head)
Right.Push_back(arr[i]);
}
// Sorting left and right vectors
Std::sort(left.Begin(), left.End());
Std::sort(right.Begin(), right.End());
// First service the requests
// On the right side of the
// Head.
For (int i = 0; i < right.Size(); i++) {
cur_track = right[i];
// Appending current track to seek sequence
Seek_sequence.Push_back(cur_track);
// Calculate absolute distance
Distance = abs(cur_track - head);
// Increase the total count
Seek_count += distance;
// Accessed track is now new head
Head = cur_track; }
// Once reached the right end
// Jump to the beginning.
Head = 0;
// Adding seek count for head returning from 199 to 0
Seek_count += (disk_size - 1);](https://image.slidesharecdn.com/diskmanagementpresentationofgroupvoperatingsystemlab-230125231922-907c5b35/85/Disk-Management-Presentation-of-Group-V-Operating-System-Lab-pptx-23-320.jpg)
![// Now service the requests again
// Which are left.
For (int i = 0; i < left.Size(); i++) {
Cur_track = left[i];
// Appending current track to seek sequence
Seek_sequence.Push_back(cur_track);
// Calculate absolute distance
Distance = abs(cur_track - head);
// Increase the total count
Seek_count += distance;
// Accessed track is now the new head
Head = cur_track; }
Cout << "total number of seek operations = "<<
seek_count << endl;
Cout << "seek sequence is" << endl;
For (int i = 0; i < seek_sequence.Size(); i++) {
Cout << seek_sequence[i] << endl; }}
Int main()
{
int arr[size] = { 176, 79, 34, 60, 92, 11, 41, 114 };
int head = 50;
cout << "Initial position of head: " << head << endl;
CSCAN(arr, head);
return 0;
}](https://image.slidesharecdn.com/diskmanagementpresentationofgroupvoperatingsystemlab-230125231922-907c5b35/85/Disk-Management-Presentation-of-Group-V-Operating-System-Lab-pptx-24-320.jpg)