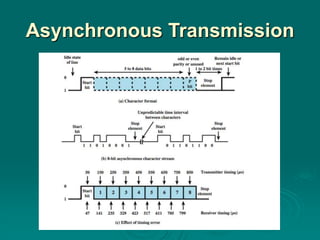
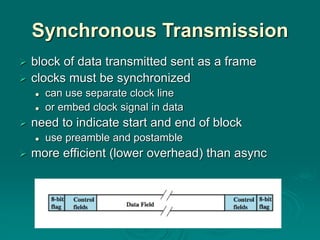
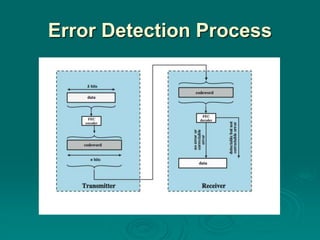
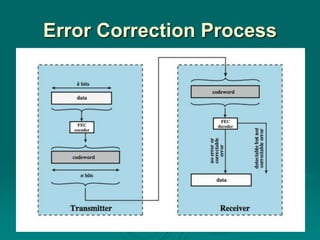
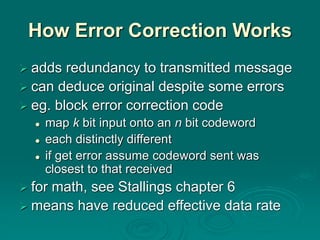
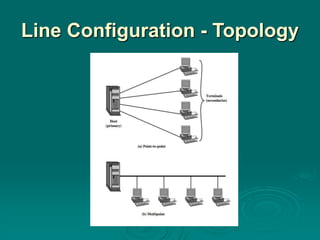
This document discusses digital data communication techniques. It covers asynchronous vs synchronous transmission, with asynchronous using overhead bits and synchronous using frame synchronization. It also discusses error detection using techniques like parity checks and cyclic redundancy checks. Error correction adds redundancy to allow decoding the original message despite some errors. Finally, it discusses line configurations, distinguishing point-to-point and multi-point topologies, and half-duplex vs full-duplex transmission methods.



























![7.__Developing_a_Research_Proposal[1].pptx](https://cdn.slidesharecdn.com/ss_thumbnails/7-260131073037-df92dd7d-thumbnail.jpg?width=640&height=640&fit=bounds)














![제 23회 보아즈(BOAZ) 빅데이터 컨퍼런스 - [MBOAX] : ABSA를 활용한 소비자 반응 분석 기반 운영 효율화 대시보드 설계](https://cdn.slidesharecdn.com/ss_thumbnails/3-1boaz23rdconferencemboax-260203102709-9d519923-thumbnail.jpg?width=640&height=640&fit=bounds)



