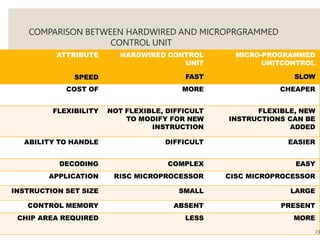
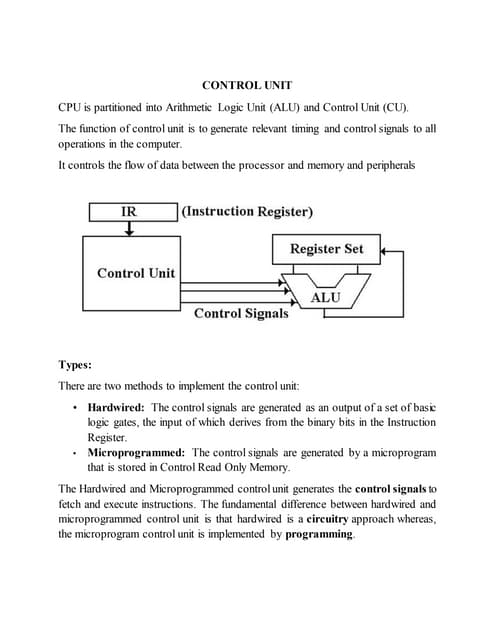
The control unit is responsible for controlling the flow of data and timing/control signals in a computer system. It directs the entire computer system to carry out stored program instructions by communicating with the arithmetic logic unit and main memory. Control units generate control signals either through hardwired logic circuits or by executing microprograms stored in control memory. Hardwired control units are faster but less flexible, while microprogrammed control units are slower but more flexible and easier to modify for new instructions. The control unit is an essential component that acts as the "brain" to coordinate activity across the entire computer system.