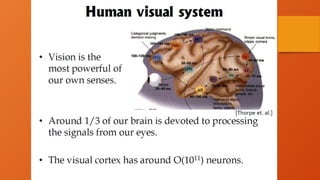
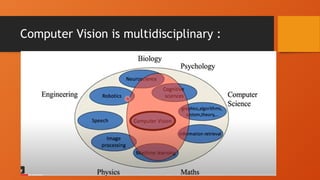
What is ComputerVision?
• Vision is about discovering from images what is
present in the scene and where it is.
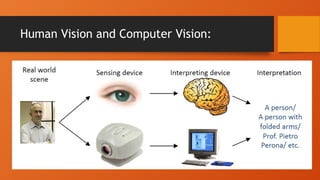
• In Computer Vision a camera (or several cameras) is
linked to a computer. The computer interprets images
of a real scene to obtain information useful for tasks
such as navigation, manipulation and recognition.
11.
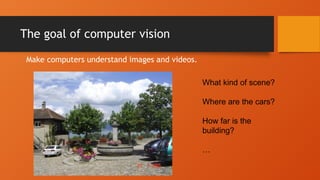
The goal ofcomputer vision
Make computers understand images and videos.
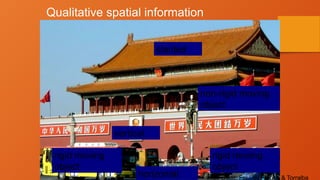
What kind of scene?
Where are the cars?
How far is the
building?
…
What is ComputerVision NOT?
• Image processing: image enhancement, image
restoration, image compression. Take an image and
process it to produce a new image which is, in some
way, more desirable.
• Computational Photography: extending the
capabilities of digital cameras through the use of
computation to enable the capture of enhanced or
entirely novel images of the world.
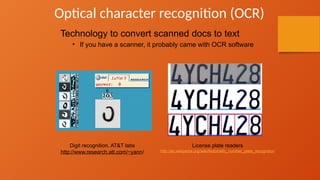
Optical character recognition(OCR)
Digit recognition, AT&T labs
http://www.research.att.com/~yann/
Technology to convert scanned docs to text
• If you have a scanner, it probably came with OCR software
License plate readers
http://en.wikipedia.org/wiki/Automatic_number_plate_recognition
Object recognition (insupermarkets)
LaneHawk by EvolutionRobotics
“A smart camera is flush-mounted in the checkout lane, continuously
watching for items. When an item is detected and recognized, the
cashier verifies the quantity of items that were found under the basket,
and continues to close the transaction. The item can remain under the
basket, and with LaneHawk,you are assured to get paid for it… “
Login without apassword…
Fingerprint scanners on
many new laptops,
other devices
Face recognition systems now
beginning to appear more widely
http://www.sensiblevision.com/
Smart cars
• Mobileye
–Vision systems currently in high-end BMW, GM,
Volvo models
– By 2010: 70% of car manufacturers.
Slide content courtesy of Amnon Shashua
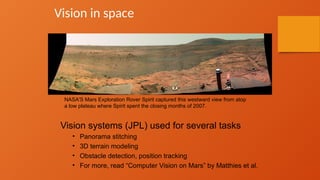
Vision in space
Visionsystems (JPL) used for several tasks
• Panorama stitching
• 3D terrain modeling
• Obstacle detection, position tracking
• For more, read “Computer Vision on Mars” by Matthies et al.
NASA'S Mars Exploration Rover Spirit captured this westward view from atop
a low plateau where Spirit spent the closing months of 2007.
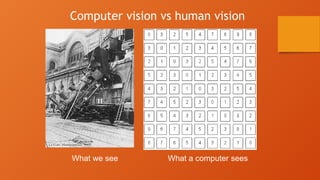
Challenges or opportunities?
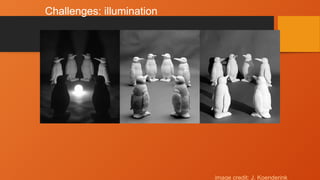
•Images are confusing, but they also reveal the structure of
the world through numerous cues
• Our job is to interpret the cues!
Image source: J. Koenderink
65.
Bottom line
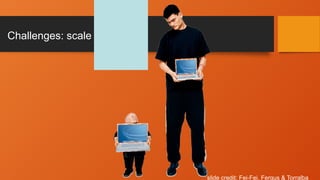
• Perceptionis an inherently ambiguous problem
– Many different 3D scenes could have given rise to a particular
2D picture
Image source: F. Durand
66.
Bottom line
• Perceptionis an inherently ambiguous problem
– Many different 3D scenes could have given rise to a particular 2D
picture
• Possible solutions
– Bring in more constraints ( or more images)
– Use prior knowledge about the structure of the world
• Need both exact measurements and statistical inference!
Image source: F. Durand
Editor's Notes
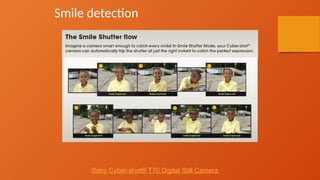
#35 Why would this be useful? Main reason is focus. Also enables “smart” cropping.