Downloaded 122 times





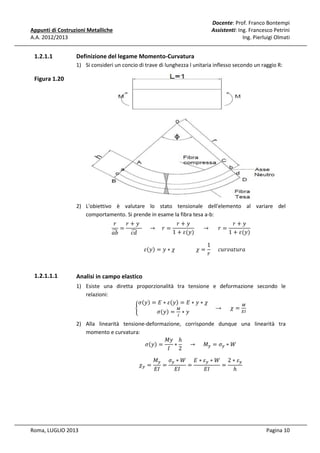
![Docente: Prof. Franco Bontempi
Assistenti: Ing. Francesco Petrini
Ing. Pierluigi Olmati
Appunti di Costruzioni Metalliche
A.A. 2012/2013
dove:
•
1
∗ max ሼሾߪଵ − ߪଶ ሿ; ሾߪଶ − ߪଷ ሿ; ሾߪଷ − ߪଵ ሿሽ
2
1
߬௦ = ∗ max (ߪଵ , ߪଶ , ߪଷ )
2
Criterio di Von Mises: si ha rottura quando ߬̅ = ߬௦ dove la ߬̅ è per
ഥ
definizione la media delle tensioni tangenziali agenti su una sfera di raggio
piccolo tendente a zero con il centro coincidente con il punto in esame.
߬௫ =
Figura 1.4
dove:
߬̅ =
Figura 1.5
߬̅ = ඨ
√15
1
∗ ඥ[ሺߪଵ − ߪଶ ሻଶ + ሺߪଶ − ߪଷ ሻଶ + ሺߪଷ − ߪଵ ሻଶ ]
2) Confrontando i due criteri:
Roma, LUGLIO 2013
ଶగ
గ
1
ଶ
න ݀ߙ ∗ න ߬ ∗ sin ߚ ∗ ݀ߚ
4∗ߨ
߬௦ =
1
∗ max (ߪଵ , ߪଶ , ߪଷ )
2
Pagina 4](https://image.slidesharecdn.com/cmelaboratoraddi-131201074858-phpapp02/85/CM-elaborato-RADDI-8-320.jpg)


























































































































Il documento sono appunti del corso di costruzioni metalliche per la laurea magistrale in ingegneria civile, forniti dal prof. Franco Bontempi e i suoi assistenti. Esamina dettagliatamente la teoria della plasticità, la stabilità dell'equilibrio e i criteri di progettazione, evidenziando vantaggi e svantaggi delle strutture metalliche. La corretta progettazione è fondamentale tenendo conto delle proprietà meccaniche degli acciai e delle tecniche di prefabbricazione.















































































