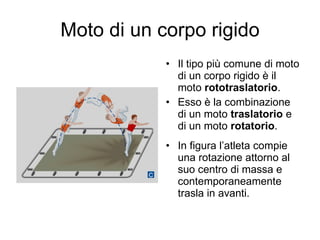
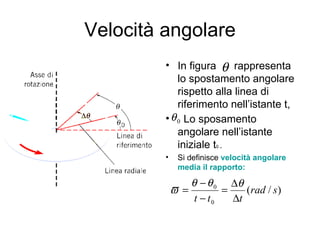
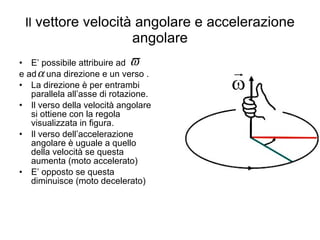
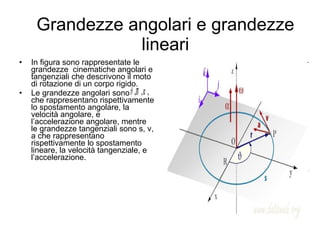
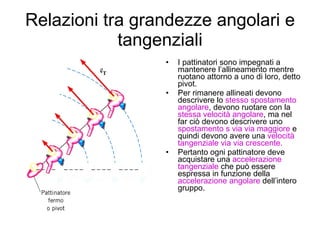
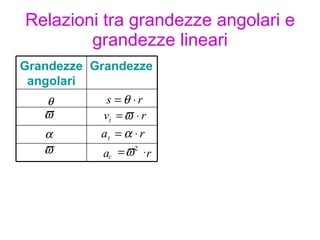
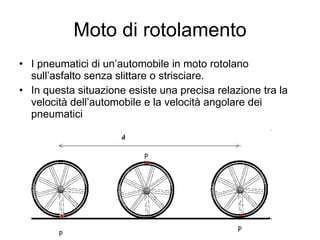
Il documento tratta il moto di un corpo rigido, enfatizzando il moto rototraslatorio, che combina il moto traslatorio e rotatorio. Viene discussa la definizione di spostamento angolare, velocità angolare, accelerazione angolare e la relazione tra grandezze angolari e tangenziali, illustrando come pattinatori e pneumatici di automobili mantengano allineamento e relazione di velocità. Infine, si evidenziano le differenze tra grandezze angolari e lineari, tutti aspetti fondamentali nella cinetica rotazionale.




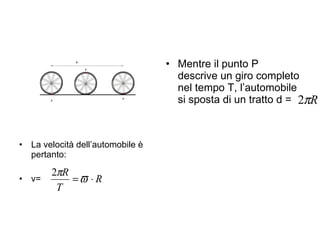









![Göz mobil[1]](https://cdn.slidesharecdn.com/ss_thumbnails/gzmobil1-110919031522-phpapp02-thumbnail.jpg?width=640&height=640&fit=bounds)

















