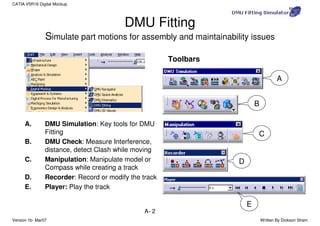
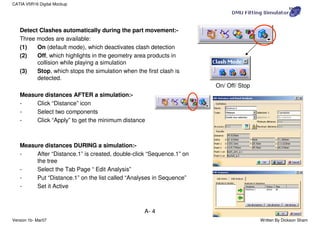
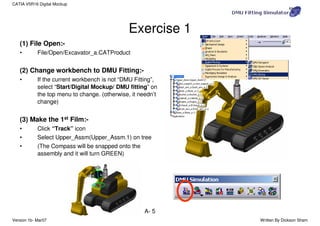
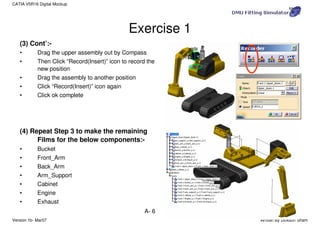
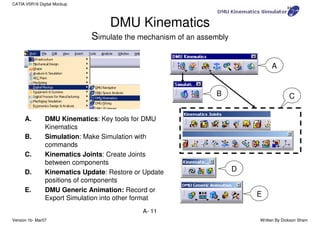
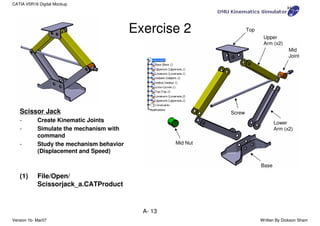
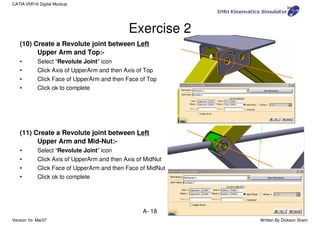
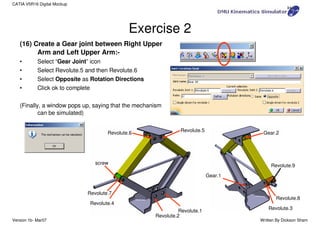
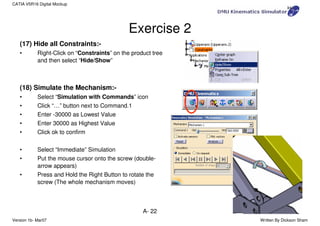
This document provides instructions for using CATIA V5R16's Digital Mockup (DMU) tools, including DMU Fitting and DMU Kinematics. It describes how to open an assembly, create tracks to simulate part motions, define kinematic joints between parts, simulate mechanisms, analyze results, and export simulations. The steps provided include opening a scissor jack assembly, creating revolute and other joints to simulate the mechanism, defining sensors to measure speed and height, and using formulas to relate simulation parameters like time to joint angles.