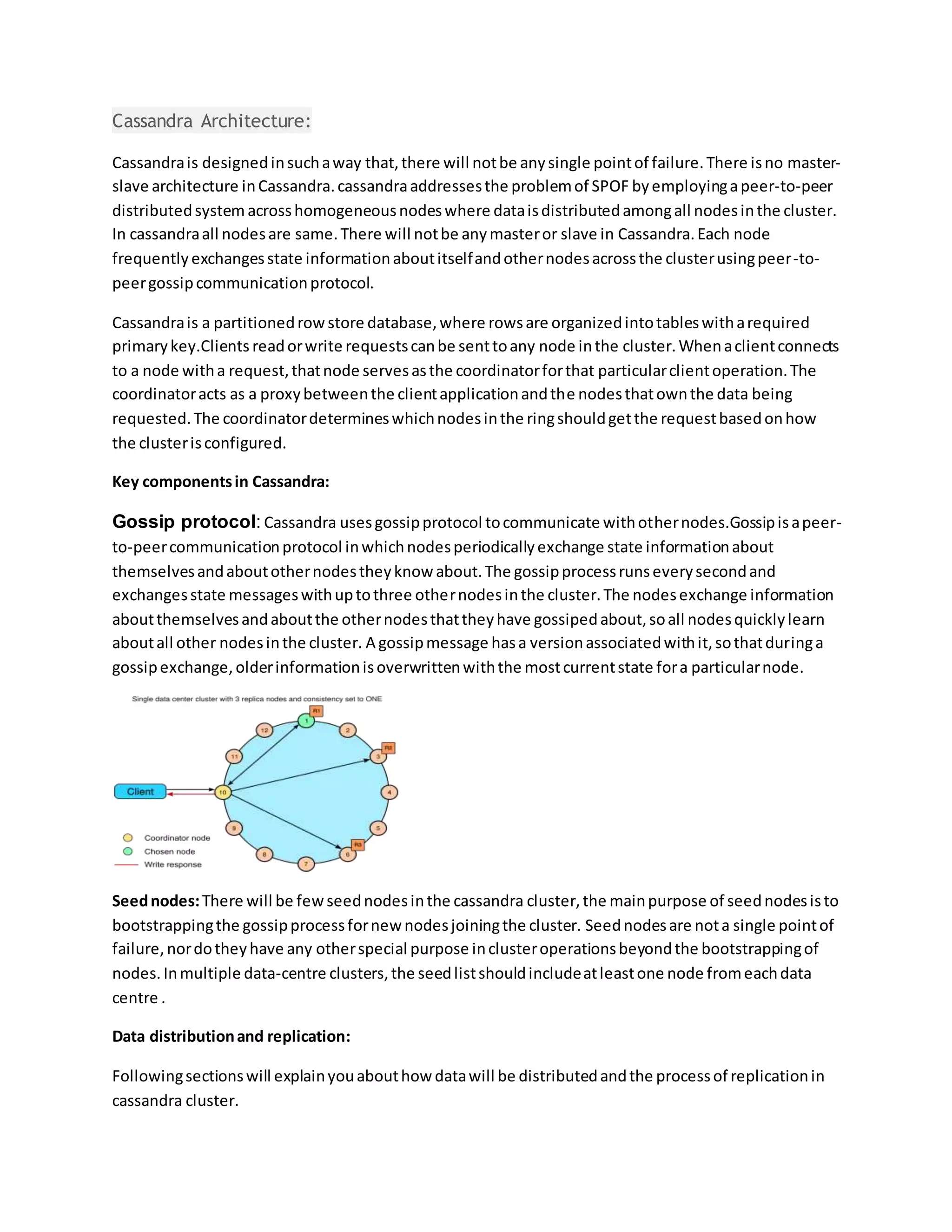
Cassandra is a distributed database designed without single points of failure. It addresses this by employing a peer-to-peer architecture where data is distributed across homogeneous nodes. All nodes are equal - there is no master or slave. Nodes exchange state information using a gossip protocol to maintain awareness of the cluster. Clients can send read or write requests to any node, which will coordinate with other nodes as needed to fulfill the request based on how data is partitioned.
![Basically,apartitionerisahash functionforcomputingthe tokenof a partitionkey.There are 3 typesof
partitioner’sincassandra.
Murmur3Partitioner (default): Uniformlydistributesdataacrossthe clusterbasedonMurmurHash
hash values.
RandomPartitioner:Uniformlydistributesdataacrossthe clusterbasedon MD5 hash values.
ByteOrderedPartitioner:Keepsanordereddistributionof datalexicallybykeybytes.
Snitch: A snitchdefinesgroupsof machinesintodatacentresandracks (the topology) thatthe
replicationstrategyusestoplace replicas. The defaultSimpleSnitch doesnotrecognizedatacentre or
rack information.TheGossipingPropertyFileSnitch isrecommendedforproduction.The followingare
differenttypesof snitchs.
dynamicsnitching
simple snitching
RackInferringSnitch
PropertyFileSnitch
GossipingPropertyFileSnitch
Ec2Snitch
Ec2MultiRegionSnitch
GoogleCloudSnitch
CloudstackSnitch
This entry was posted in Cassandra and tagged AvailabilityCassandraConsistencyPartitionTolerance on January27, 2016 by Siva
Table of Contents [hide]
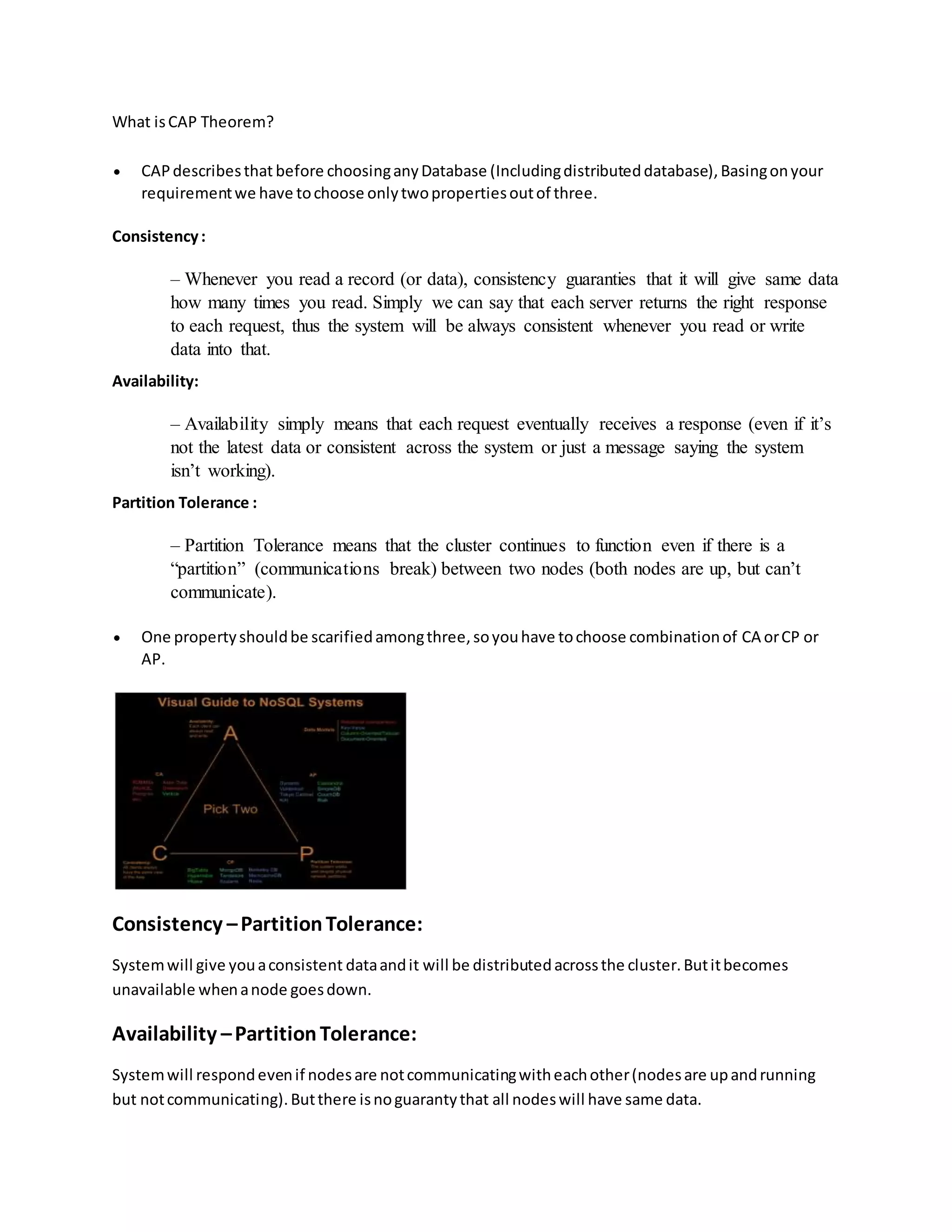
What is CAP Theorem?
o Consistency
o Availability
o Partition Tolerance
o Consistency – Partition Tolerance:
o Availability –Partition Tolerance:
o Consistency – Availability:
Share this:](https://image.slidesharecdn.com/cassandraarchitecture-181102095000/75/Cassandra-architecture-3-2048.jpg)
![Consistency –Availability:
Systemwill give youaconsistentdataandyoucan write/readdatato/fromanynode,butdata
partitioningwill notbe syncwhendevelopapartitionbetweennodes (RDBMSsystemssuchasMySQL
are of CA combinationsystems.)
Accordingto CAPtheorem, Cassandrawill fallintocategoryof AP combination,thatmeansdon’tthink
that Cassandrawill notgive a consistentdata.We can tune Cassandraas per ourrequirement togive
youa consistentresult.
Cassandra Interview Cheat Sheet:
his entry was posted in Cassandra on October 10, 2015 by Siva
Table of Contents [hide]
Cassandra
o
NoSQL
KeySpace
Partitioner
Snitch
Replication Factor
Partitioners
Share this:
Cassandra
Cassandra is a distributed database from Apache that is highly scalable and designed to manage
very large amounts of structured data. It provides high availability with no single point of failure.
NoSQL
The primary objective of a NoSQLdatabase is to have
simplicityof design,
horizontal scaling,and
finercontrol overavailability.](https://image.slidesharecdn.com/cassandraarchitecture-181102095000/75/Cassandra-architecture-5-2048.jpg)
![TTL
Time-to-live. An optional expiration date for values inserted into a column
Consistency
consistency refers to how up-to-date and synchronized a row of data is on all of its replicas.
Backup and Restoring Data
Cassandra backs up data by taking a snapshot of all on-disk data files (SSTable files) stored in
the data directory.
You can take a snapshot of all keyspaces, a single keyspace, or a single table while the system is
online.
Cassandra Tools
The nodetool utility
A commandline interface forCassandraformanagingacluster.
Cassandrabulkloader(sstableloader)
The cassandra utility
Starts the CassandraJava serverprocess
.The cassandra-stresstool
A Java-basedstresstestingutilityforbenchmarkingandloadtestingaCassandracluster.
The sstablescrubutility
Scrub the all the SSTablesforthe specifiedtable.
The sstablesplitutilitysstablekeys
The sstablekeysutilitydumpstable keys.
The sstableupgrade tool
Upgrade the SSTablesinthe specifiedtable (orsnapshot)tomatchthe current versionof Cassandra.
Cassandra Overview:
This entry was posted in Cassandra on September 8, 2015 by Siva
Table of Contents [hide]
Cassandra Overview
o
Commit Log & MemTable
o Cassandra Key Components
](https://image.slidesharecdn.com/cassandraarchitecture-181102095000/75/Cassandra-architecture-8-2048.jpg)


![There are manyvtypesof snitcheslike dynamicsnitching,simple snitching,RackInferringSnitch,
PropertyFileSnitch,GossipingPropertyFileSnitch,Ec2Snitch,Ec2MultiRegionSnitch,GoogleCloudSnitch,
CloudstackSnitch.
Cassandra is a partitioned row store database, where rows are organized into tables with a required
primary key.Clients read or write requests can be sent to any node in the cluster. When a client
connects to a node with a request, that node serves as the coordinator for that particular client
operation. The coordinator acts as a proxy between the client application and the nodes that o wn the
data being requested. The coordinator determines which nodes in the ring should get the request
based on how the cluster is configured
Cassandraproductionscenarios/issues
Thisentrywas postedinCassandra and tagged ConstantReconnectionPolicyDCAwareRoundRobinPolicy
DefaultRetryPolicydistributedcallsincassandraJDBCDowngradingConsistencyRetryPolicy
ExponentialReconnectionPolicyLoadBalancingPolicyReadReconnectionPolicyRetryPolicy
RoundRobinPolicyTokenAwarePolicyUnavailable Write onJanuary28, 2016 by Siva
Table of Contents[hide]
Production issue:
FewProductionconfigurationsincassandra
RetryPolicy
DefaultRetryPolicy
DowngradingConsistencyRetryPolicy
ReconnectionPolicy
ConstantReconnectionPolicy](https://image.slidesharecdn.com/cassandraarchitecture-181102095000/75/Cassandra-architecture-13-2048.jpg)
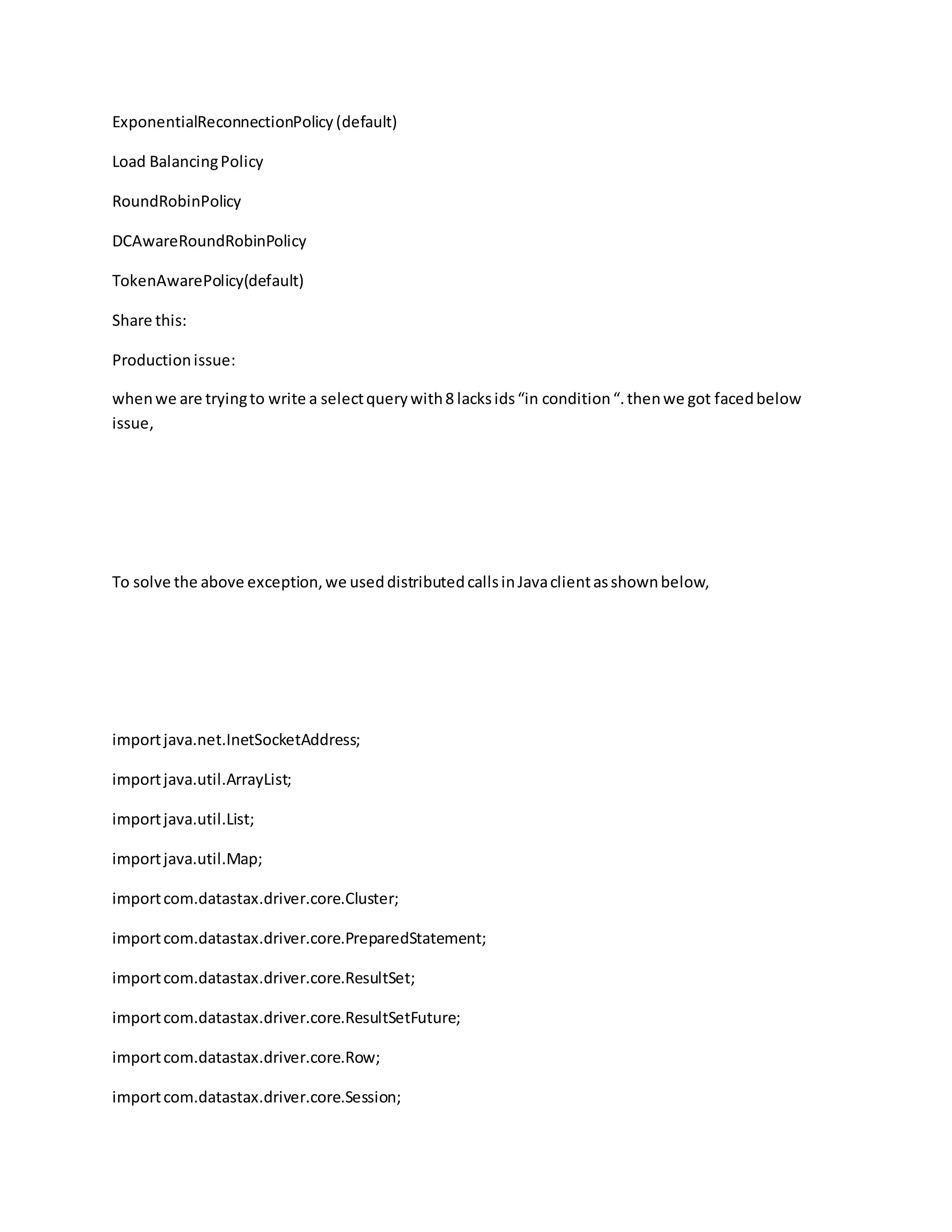
![importcom.datastax.driver.core.exceptions.NoHostAvailableException;
publicclassSelectCassandraDistrbuted{
publicstaticvoidmain(String[] args) {
Cluster cluster= null;
try{
cluster= Cluster.builder().addContactPoints("node1address/IP","node2address/IP","node3
address/IP").build();
cluster.getConfiguration().getSocketOptions().setReadTimeoutMillis(600000000);
Sessionsession=cluster.connect("keyspace_name");
System.out.println("connected");
PreparedStatementstatement=session.prepare("select*fromtable where tmp_time =?");
List<String>idsList= newArrayList<String>();
//Here we added8 lacs idsto the idsListlist
List<ResultSetFuture>futures=new ArrayList<ResultSetFuture>();
//Here we are executingthe query.
for (Stringid:idsList) {
ResultSetFuture resultSetFuture =session.executeAsync(statement.bind(id));
futures.add(resultSetFuture);
}
//Fetchingthe results](https://image.slidesharecdn.com/cassandraarchitecture-181102095000/75/Cassandra-architecture-15-2048.jpg)
![for (ResultSetFuture future:futures){
ResultSetrows= future.getUninterruptibly();
Row row= rows.one();
System.out.println(row.getString("sys_serial_no"));
System.out.println(row.getString("tmp_time"));
}
}
importjava.net.InetSocketAddress;
importjava.util.ArrayList;
importjava.util.List;
importjava.util.Map;
importcom.datastax.driver.core.Cluster;
importcom.datastax.driver.core.PreparedStatement;
importcom.datastax.driver.core.ResultSet;
importcom.datastax.driver.core.ResultSetFuture;
importcom.datastax.driver.core.Row;
importcom.datastax.driver.core.Session;
importcom.datastax.driver.core.exceptions.NoHostAvailableException;
publicclassSelectCassandraDistrbuted{
publicstaticvoidmain(String[] args) {
Cluster cluster= null;
try{
cluster= Cluster.builder().addContactPoints("node1address/IP","node2address/IP","node3
address/IP").build();
cluster.getConfiguration().getSocketOptions().setReadTimeoutMillis(600000000);
Sessionsession=cluster.connect("keyspace_name");](https://image.slidesharecdn.com/cassandraarchitecture-181102095000/75/Cassandra-architecture-16-2048.jpg)
![RoundRobinPolicy
Distributesqueriesacross all nodesinthe cluster,regardlessof whatdatacentre the nodesmaybe in.
DCAwareRoundRobinPolicy
SimilartoRoundRobinPolicy,butprefershostsinthe local datacenterandonlyusesnodesinremote
datacentersasa lastresort.
TokenAwarePolicy(default)
A LoadBalancingPolicywrapperthataddstokenawarenesstoa childpolicy.Thisaltersthe childpolicy’s
behaviorsothat itfirstattemptsto sendqueriestoLOCALreplicas(asdeterminedbythe childpolicy)
basedon the Statement‘srouting_key.Once those hostsare exhausted,the remaininghostsinthe child
policy’squeryplanwill be used.
Cassandra write and read process:
This entry was posted in Cassandra and tagged Bloom filtercassandra
delete flowcassandra insert flowcassandra read flowcassandra update
flowcommit logCompactioncompression
offsetDateTieredCompactionStrategyHow data is written into
cassandraHow do write patterns effect reads in cassandraHow is data
deleted in cassandraHow is data read in cassandraHow is data updated
in cassandraLeveledCompactionStrategymemTablePartition
indexpartition keyPartition summaryrow
cacheSizeTieredCompactionStrategySSTable
Table of Contents [hide]
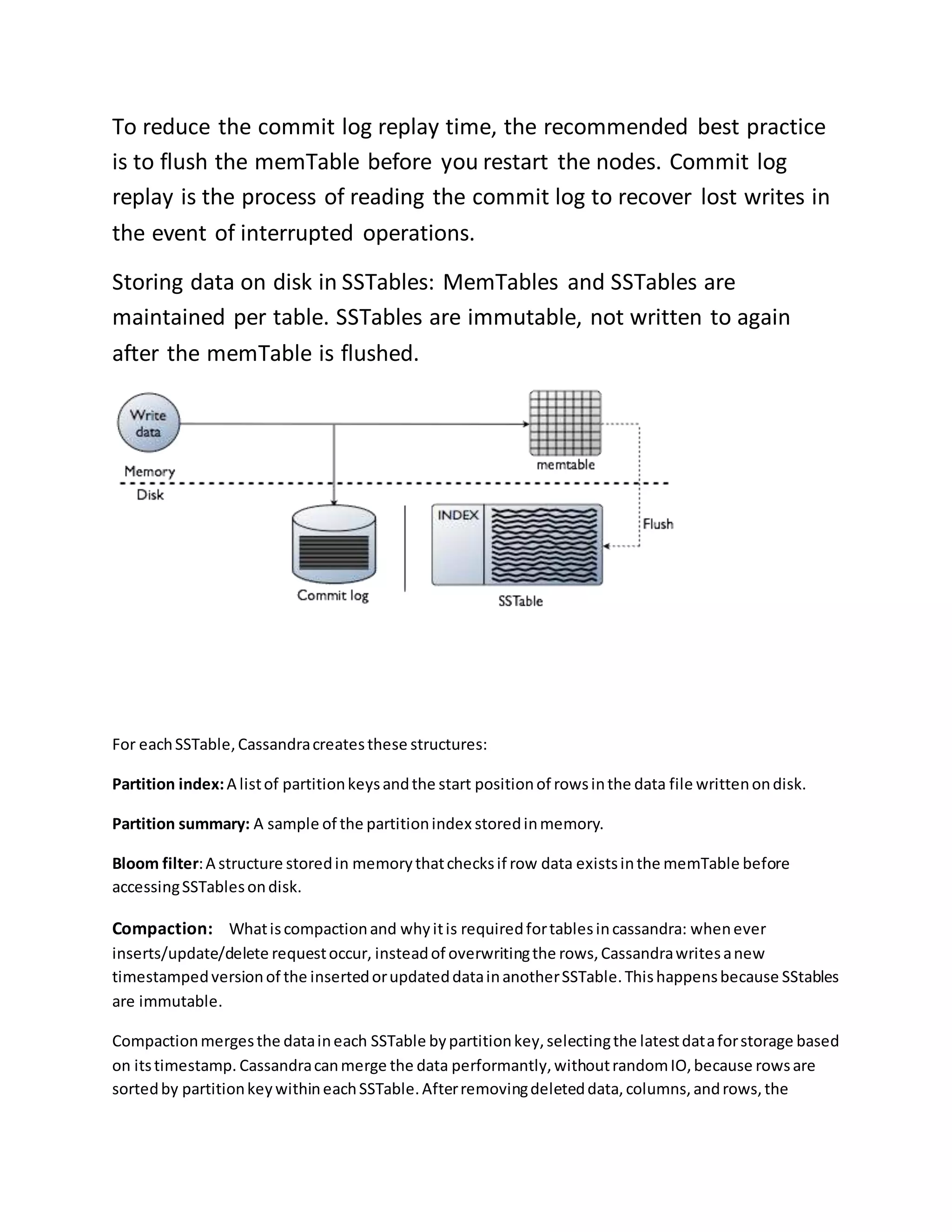
Storage engine
o How data is written?
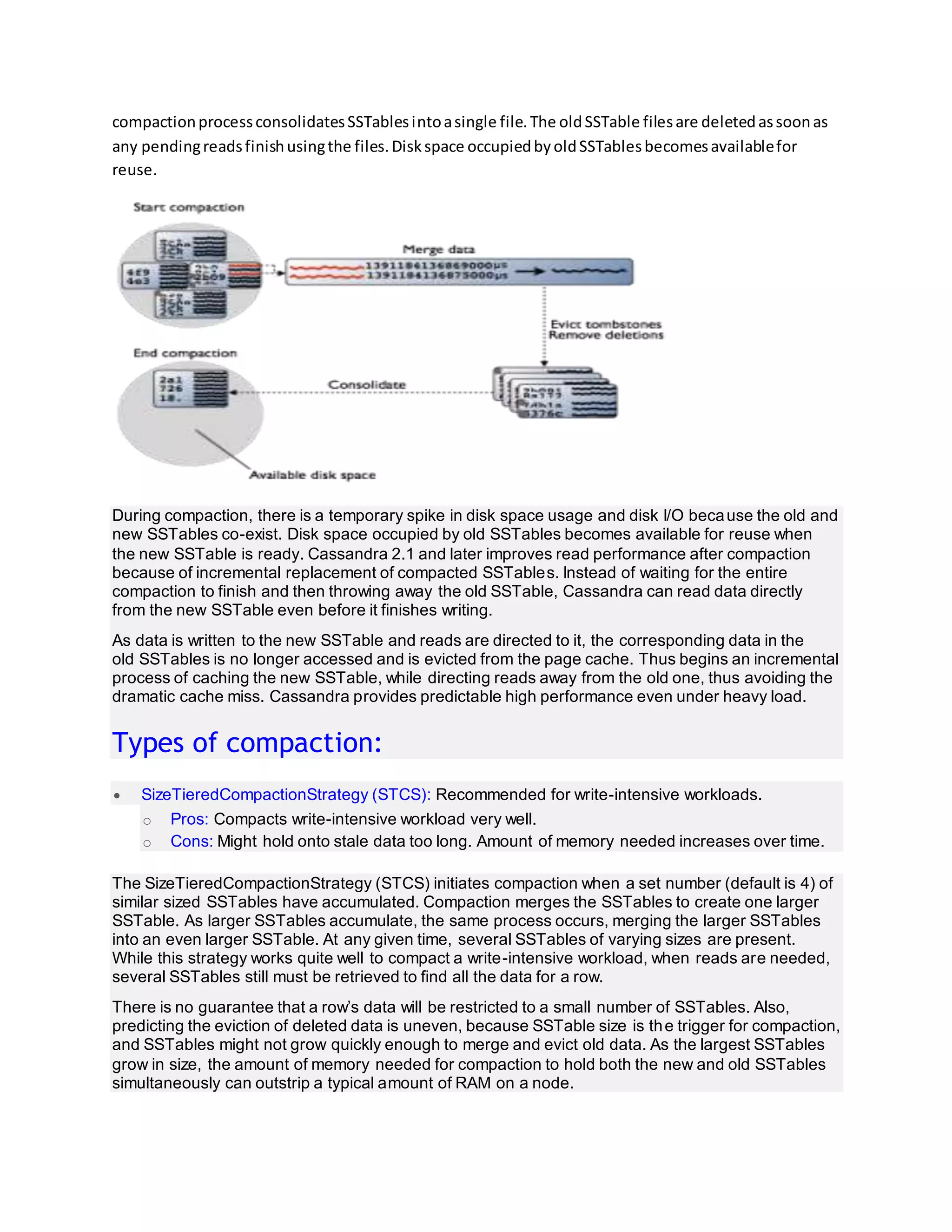
o Compaction:
o Types of compaction:
o How is data updated?
o How is data deleted?
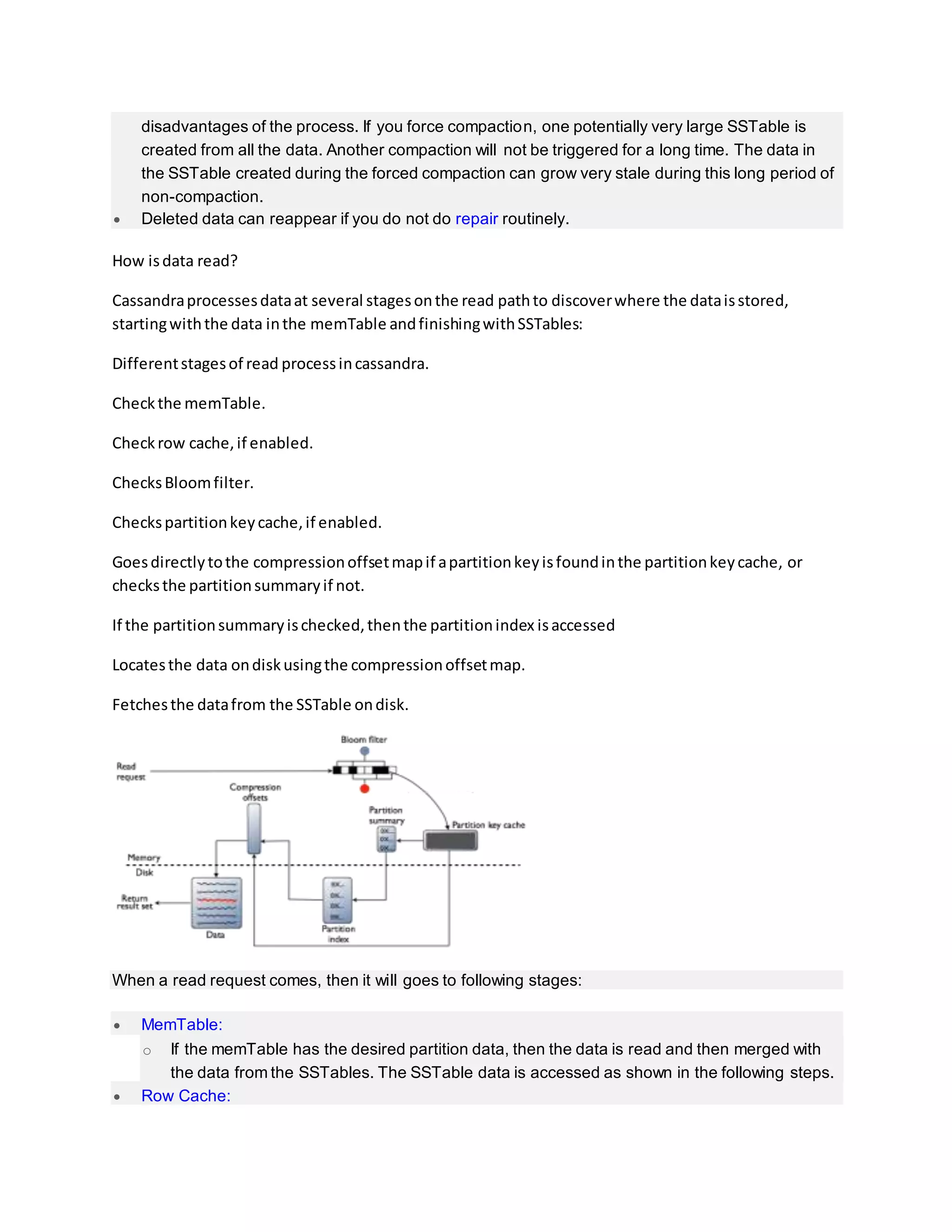
o How is data read?
o How do write patterns effect reads?
o Share this:](https://image.slidesharecdn.com/cassandraarchitecture-181102095000/75/Cassandra-architecture-19-2048.jpg)



























![[DSC Europe 25] Imai Jen-La Plante - The New Generation: AI and the Future of...](https://cdn.slidesharecdn.com/ss_thumbnails/kxi8t2l5rggivgcenyba-1-jenlaplante-dsc-251208152532-d1e076c2-thumbnail.jpg?width=640&height=640&fit=bounds)
![[DSC Europe 25] Ivan Peric - Intelligence Swarm Logic and Techno-Functional M...](https://cdn.slidesharecdn.com/ss_thumbnails/7my7c97fsduiccadgavw-2-251212103249-5a03f7c6-thumbnail.jpg?width=640&height=640&fit=bounds)
![[DSC Europe 25] Debmalya Biswas - Agentification: the art of transforming man...](https://cdn.slidesharecdn.com/ss_thumbnails/r5azlggvtqiaiiusrqdr-4-251212103249-5a12c89b-thumbnail.jpg?width=640&height=640&fit=bounds)



![[DSC Europe 25] Sara Polak - The Ancient Operating System: What Archaeology T...](https://cdn.slidesharecdn.com/ss_thumbnails/3vch2p6tttdnwhsgazoz-3-sara-polak-smart-cities-251208152532-64404202-thumbnail.jpg?width=640&height=640&fit=bounds)
![[DSC Europe 25] Dunja Adzic Jovanovic - AI and Cybersecurity: Defending Data ...](https://cdn.slidesharecdn.com/ss_thumbnails/o1zylpbhrtwnixxq2xj8-7-251211083048-185086f6-thumbnail.jpg?width=640&height=640&fit=bounds)



![[DSC Europe 25] Katherine Forrest - AI NOW: Understanding the Velocity of Cha...](https://cdn.slidesharecdn.com/ss_thumbnails/wvvbruqfrci0sfq9xwgb-4-251212104007-e5ad1987-thumbnail.jpg?width=640&height=640&fit=bounds)
![[DSC Europe 25] Hans Kleinsman - The Compliance Gearbox: How Tax Tech Mediate...](https://cdn.slidesharecdn.com/ss_thumbnails/dxdytie1toel0hr90bjs-2-251212103250-174fdbe7-thumbnail.jpg?width=640&height=640&fit=bounds)


![[DSC Europe 25] Bassam Maharmeh - Artificial Intelligence: Opportunities and ...](https://cdn.slidesharecdn.com/ss_thumbnails/thhfmr2fqpawzj7hsjpg-5-251211083048-2c23204f-thumbnail.jpg?width=640&height=640&fit=bounds)
![[DSC Europe 25] Branko Dzakula - From Defense to Attack: How AI Redefines Cyb...](https://cdn.slidesharecdn.com/ss_thumbnails/80bdzdxpr3ky2g0qvyk9-8-251211083048-ce5fc1ee-thumbnail.jpg?width=640&height=640&fit=bounds)
![[DSC Europe 25] Kaja Kandare - LLM as a judge.pptx](https://cdn.slidesharecdn.com/ss_thumbnails/arxyccaxsdsd1ba99wjw-7-251212104007-2b4e3f64-thumbnail.jpg?width=640&height=640&fit=bounds)
![[DSC Europe 25] Jovan Bogicevic - Legacy to AI-Driven Defense: Transforming D...](https://cdn.slidesharecdn.com/ss_thumbnails/rsarluadt563hntyfc8q-3-251211083849-3e7bc4c0-thumbnail.jpg?width=640&height=640&fit=bounds)
