Download to read offline










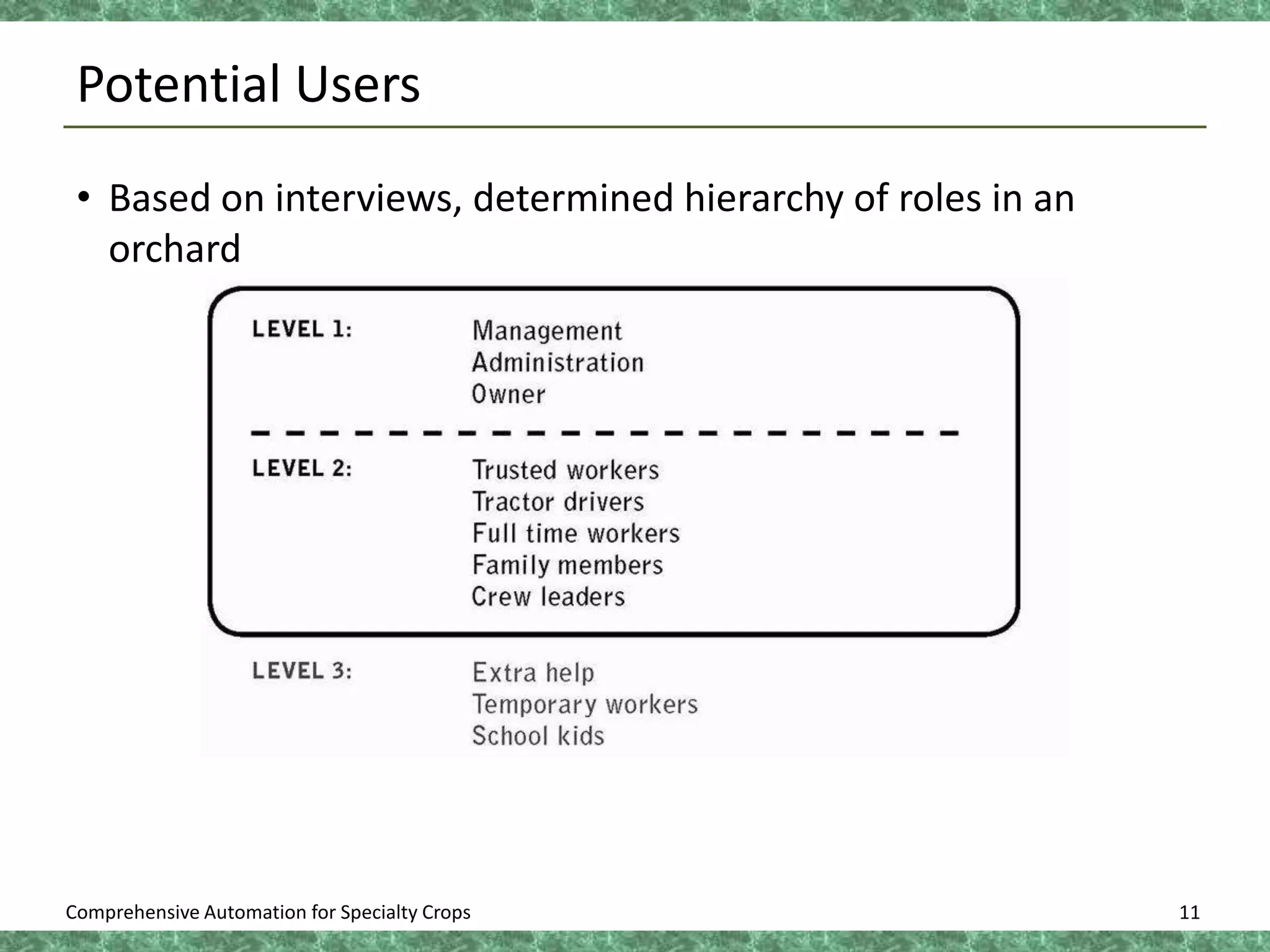


































The document discusses the development of a user-friendly interface for an autonomous vehicle intended for use in specialty crop operations, focusing on usability for farm workers. Initial user tests revealed that while computer-experienced users were comfortable with the interface, others needed training to operate the equipment effectively. Future work aims to improve row detection methods and enhance the vehicle's control functionalities for better performance in orchards.